

|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Санкт-Петербургский государственный университет аэрокосмического приборостроения» |
Военная кафедра при ГУАП |
|||
цикл Военно-воздушных сил |
|||
|
|
|
|
|
|
Утверждаю |
|
|
|
Начальник военной кафедры при ГУАП |
|
|
|
полковник В. Скуратов |
|
|
|
«___»_______________ 20___ г. |
|
|
|
|
|
Групповое занятие № 33 «Автоматизированные навигационные системы»
по дисциплине: |
|||
Эксплуатация и ремонт авиационного оборудования самолетов и |
|||
вертолетов |
|||
(наименование учебной дисциплины) |
|||
|
|||
Военно-учетная специальность: |
«Эксплуатация и ремонт авиационного |
||
оборудования самолётов и вертолётов» |
|||
|
(наименование ВУС) |
||
-
Рассмотрено и одобрено
на заседании военной кафедры при ГУАП
Протокол № _____
от «____» _____________ 20___ г.
Санкт-Петербург
2011 г.
Содержание группового занятия Введение
Своевременность и точность выхода самолета в заданный район требуют выполнения полета в строгом соответствии с навигационной программой. Навигационная программа определяет траекторию полета в функции времени.
Траекторией полета называется линия, описываемая центром масс самолета при его движении в воздушной среде. Проекция траектории на поверхность Земли называется линией пути. Различают линию заданного (ЛЗП) и фактического (ЛФП) пути. Линия заданного пути, проведенная на карте, представляет собой маршрут полета. Проекция траектории на вертикальную плоскость называется профилем полета. Профиль полета обычно задают как функцию маршрута.
В зависимости от того, каким образом обеспечивается получение информации о координатах местоположения, различают следующие методы навигации: методы счисления пути, позиционные методы, обзорно-сравнительные методы.
Методы счисления пути основаны на измерении составляющих вектора скорости или ускорения летательного аппарата и интегрирований во времени этих составляющих для получения координат его местоположения. Эти метода реализуются в воздушных, доплеровских а инерциальных системах навигации.
Позиционные методы (методы поверхностей и линий положения) основаны на измерении физических величин, дающих линии или поверхности положения, пересечение которых определяет точку местоположения. Эти методы используются при построении радиотехнических и астрономических навигационных систем.
Обзорно-сравнительные методы основаны на наблюдении (визуальном или с помощью технических средств) земной поверхности и сравнении ее изображения с картой или системой ориентиров, заложенных в памяти бортовой ЭВМ. К этим методам относится визуальная, радиолокационная и телевизионная ориентировка и так называемая корреляционно-экстремальная навигация.
Вопрос № 1. Корреляционно-экстремальные навигационные системы
Путем сравнения информации карты поля с информацией измерителя этого же поля отыскивается экстремум корреляционной функции, т.е. максимум их совпадения, по которому определяется местоположение ЛА относительно принятой навигационной системы координат.
По виду рабочей информации, получаемой от датчика поля, различают КЭНС следующих типов (рис. 1):
тип 1-с точечным зондированием поля;
тип 2-с линейной разверткой зондирования;
тип 3-с использованием двумерного изображения (кадра поля).
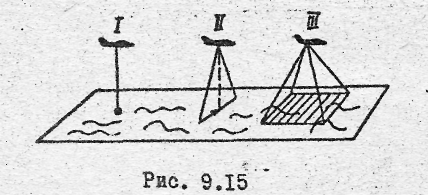
Рис. 1. Типы КЭНС
На примере использования поля рельефа рассмотрим принцип работы КЭНС типа 1 с аналоговым вычислителем (рис. 2).
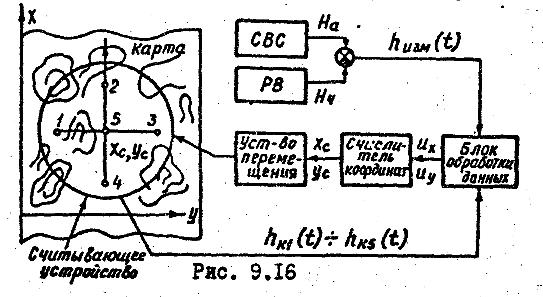

Рис. 2. Принцип работы КЭНС с точечным зондированием поля
Пусть имеется карта поля рельефа hk (x,y), изготовленная фотооптическим способом (например, в виде негативной или позитивной фотопленки) на основе крупномасштабных топографических карт. Вдоль карты поля по информации о счисленных координатах х и у перемещается считывающее устройство, имитирующее полет самолета над данной местностью.
В считывающем устройстве имеется пять крестообразно расположенных точек считывания, центральная из которых соответствует предполагаемому местоположению самолета. По мере перемещения самолета над земной поверхностью с точек считывания поступает информация о записанном на карте поле рельефа hKi(t), i = 1, 2, 3, 4, 5. Информация о фактическом рельефе местности, над которой пролетает самолет, получается путем непосредственного измерения абсолютной Ha(t) и истинной высоты Hи(t) с помощью барометрического высотомера и радиовысотомера:
hИЗМ(t)=Ha(t)-Hи(t)
Для упрощения рассуждений предположим, что перекрестье считывающего устройства ориентировано вдоль осей Ох и Оу навигационной системы координат и движение самолета осуществляется вдоль оси Ох. Учитывая зависимость перемещения самолета от времени Х=W∙t, все реализации поля рельефа можно представить как функции расстояния и записать:

где, x - реальная координата самолета; Δx - ошибка счисления пути;
a - смещение точек 2 и 4 относительно центра креста.
По этой информации блок отработки, содержащий коррелятор, формирует корректирующий сигнал Ux, воздействующий на интегратор счисления сути. Алгоритм коррелятора основан на упрощенном вычислении корреляционной функции за счет перемножения и осреднения во времени сигналов h(x) и h(x+Δx) по формуле

Здесь интервал 0 - T рассматривается как скользящий. Управляющий сигнал образуется следующим образом:

что при учете (1) эквивалентно вычислению корреляционной функции с линейным (а не временным) аргументом, т.е.

где, S=WT - скользящий интервал осреднения.
Раскрывая скобки в под интегральном выражении, получим

В силу симметричности корреляционной функции поля R(a)=R(-a). Тогда можно записать:

Схема
коррекции практически линейна, т.е.
 в ограниченном диапазоне ошибок
в ограниченном диапазоне ошибок

Боковой канал рассмотренной схемы использует другое (перпендикулярное) сечение пространственной корреляционной функции поля рельефа и работает аналогично.
Схема КЭШ с крестообразным расположением считывающих точек явилась одной из первых и получила название дифференциальной. Ее недостатком является трудность ликвидации больших начальных отклонений. Этого недостатка удается избежать в цифровой КЭНС, где принцип использования корреляционных свойств поля рельефа выступает в несколько ином виде.
Из-за относительно высокой трудоемкости составления карт поля и необходимости хранения этой информации на борту самолета, КЭНС, как правило, используется для периодической коррекции счисления дуги. В этом случае вдоль маршрута полета (рис. 3) выбирается несколько участков коррекции, для которых составляется и заносится в память ЦВМ карта поля.
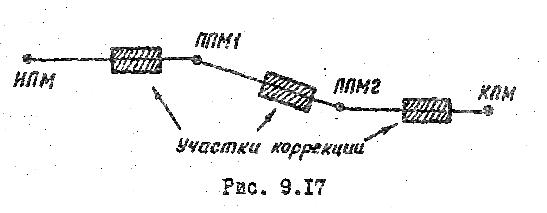
Рис. 3.
Точность КЭНС зависит от следующих факторов:
радиуса корреляции поля R и времени проведения коррекции (точнее, длины используемой реализации поля Lp);
соотношения дисперсии поля к дисперсии ошибок датчика;
точности записи поля на карте (для цифровой схемы - от величины квадрата
 ).
).
Одним из способов повышения точности КЭНС является использование первой или второй производной рельефа. В этом случае удается выделить мелкую структуру поля и, следовательно, сократить радиус коррекции, а также устранить постоянные (медленно меняющиеся) ошибки измерителя поля.
Вывод: быстрыми темпами развиваются системы навигации, основанные на автоматическом сопоставлении некоторого физического поля Земли в точке местоположения летательного аппарата с соответствующей картой, хранящейся в памяти БЦВМ. Такие системы подучили название корреляционно-экстремальных (КЭНС). В них могут быть использованы практически все физические поля Земли: рельефа, магнитное, тепловое, гравитационное и т.д. Выбор поля обусловливается его изученностью, так как необходимо составлять соответствующие карты, и стабильностью.
Путем сравнения информации карты поля с информацией измерителя этого же поля отыскивается экстремум корреляционной функции, т.е. максимум их совпадения, по которому определяется местоположение ЛА относительно принятой навигационной системы координат.