

Лекции по дисциплине:
"МЕТОДЫ И СРЕДСТВА ИССЛЕДОВАНИЯ БЫТОВЫХ МАШИН И ПРИБОРОВ"
4. ИЗМЕРЕНИЕ РАСХОДА
При измерении количества жидкости, газа или пара могут ставиться две задачи:
1) определение количества вещества, прошедшего через измерительный участок без привязки к продолжительности измерения (за промежуток времени (смену, сутки и т.д.)), - в этом случае измерительные приборы называют счетчиками количества;
2) определение количества вещества, проходящего через измерительный участок в единицу времени (секунду, час), - в этом случае измерительные приборы называют расходомерами.
Счетчики количества бывают двух разновидностей: скоростные — определяющие количество вещества по числу оборотов ротора, просуммированное счетным механизмом, и объемные — определяющие количество вещества по числу объемов (порций, доз), также просуммированное счетным устройством.
В промышленных и лабораторных условиях чаще ставится задача измерения количества вещества, проходящего в единицу времени через трубопровод, т. е. задача измерения расхода. Расход, измеренный в единицах массы, деленных на единицу времени (кг/с, т/ч), называется массовым расходом, а измеренный в единицах объема, деленных на единицу времени (м3/с, м3/ч),—объемным расходом.
В настоящее время известно свыше 20 методов измерения расхода и большое число их разновидностей. Наибольшее распространение получили расходомеры с сужающими устройствами, расходомеры обтекания, электромагнитные и тахометрические расходомеры.
4.1 Расходомеры обтекания
Большую группу расходомеров составляют приборы, первичный преобразователь которых («поплавок», поршень, диск, пластина или крыло) воспринимает силовое воздействие набегающего потока измеряемой жидкости. Обтекаемое тело перемещается или прямолинейно, сохраняя положение своей оси симметрии, или поворачивается вокруг точки крепления. Силам, действующим со стороны потока, противодействуют сила веса обтекаемого тела (при вертикальном направлении потока снизу вверх) или сила, развиваемая специальной пружиной, поддерживающей тело (в этом случае направление потока может быть произвольным). Выходным сигналом таких приемных преобразователей служит величина перемещения или угол поворота.
На рис. 1 приведены принципиальные схемы действия приемных преобразователей расходомеров обтекания. В первых трех схемах (а, б, в) уравновешивающая сила постоянна и равна силе веса перемещающегося тела; равновесное состояние тела достигается за счет того, что при его движении автоматически регулируется величина сил воздействия потока путем изменения площади проходного сечения. Так, в первой схеме (рис. 141, а) поплавок перемещается в вертикальной конической трубке; по мере его подъема (с ростом расхода) увеличивается площадь кольцевого проходного сечения, благодаря чему уменьшаются силы действия потока. Во второй схеме (рис. 1, б) изменение проходного сечения происходит за счет подъема профилированного (конического) тяжелого клапана в седле постоянного сечения; в третьей схеме (рис. 1, б) поднимающийся поршень открывает сливные окна в стенке цилиндра. Очевидно, что поскольку уравновешивающая сила веса постоянна, то во всех равновесных состояниях поднимающегося тела (поплавка, клапана, поршня) сила действия потока также остается одной и той же.
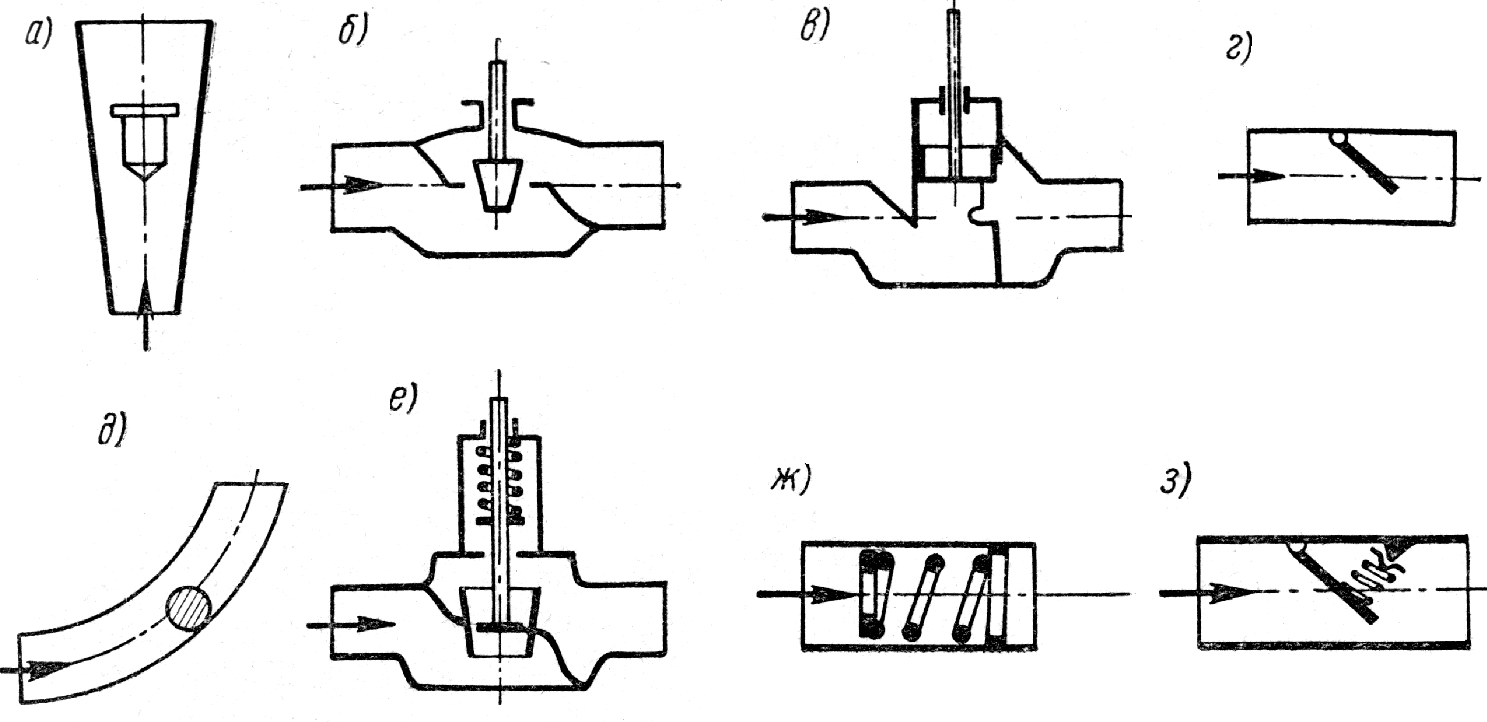
Рис. 1 Типичные принципиальные схемы приемных преобразователей расходомеров обтекания
Равнодействующая сил, приложенных со стороны потока к подвижному телу, может быть выражена как
|
(1) |
|||
где |
Р |
|
разность полного давления в потоке до и после тела; |
|
|
fэф |
|
эффективная площадь приложения давления. |
|
В схемах на рис. 1 а, в эффективная площадь неизменна, что дает основание называть такие преобразователи расходомерами постоянного перепада. В схеме на рис. 1, б при перемещении клапана величина fэф изменяется.
4.2 Скоростные тахометрические расходомеры
Тахометрические расходомеры составляют широкий класс приборов, включающий в числе прочих и скоростные расходомеры, В тахометрических первичных преобразователях движущийся поток жидкости или газа приводит во вращение первичный элемент — ротор, скорость вращения которого является мерой скорости потока. Таким образом, схема расходомера состоит из первичного (приемного) преобразователя -ротора, вторичного тахометрического преобразователя; и измерительного прибора индикаторным или регистрирующим устройством. Конструктивное объединение ротора с тахометрическим преобразователем иногда в литературе именуется датчиком расходомера. Широкое применение тахометрических расходомеров связано с развитием электрических методов измерения скоростей вращения роторов. Частотная модуляция сигнала датчики (при малой инерционности ротора) позволяет сочетать высокую точность и малую инерционность измерения секундных расходов, В лучших современных конструкциях, предназначенных для измерения расходов в трубопроводах диаметром от 4 до 1000 мм, основная приведенная погрешность доходит до ±0,2%, а постоянная времени прибора составляет менее 0,01 с в широком рабочем диапазоне.
Независимость работы датчика от давления в потоке и возможность изготовления деталей из материалов, устойчивых к воздействию измеряемых сред, позволяют использовать тахометрические расходомеры практически при любых теплотехнических исследованиях.

Рис. 2 Схемы тахометрических преобразователей расходомеров:
1 – чувствительный элемент; 2 – вторичный преобразователь (тахометр).
При универсальной электроизмерительной части расходомера основные метрологические и эксплуатационные свойства прибора определяются особенностями первичных преобразователей. Конструктивно скоростные тахометрические преобразователи выполняются либо с роторами в виде осевых или тангенциальных миниатюрных крыльчатых турбинок, либо со свободно вращающимися шариками (рис. 2). Прямолопастные осевые турбинки и шарики приводятся в движение с помощью предварительной закрутки потока в тангенциальных камерах или на неподвижных винтовых шнеках. Встречаются конструкции (обычно малых калибров), в которых создается предварительная закрутка потока. В тангенциальных турбинных преобразователях ротор вращается вокруг оси, перекрещивающейся с осью потока; лопасти турбинки выполняются в виде пластин или чашечек. Поток жидкости поступает на лопасти ротора через направляющий аппарат — одноструйный или многоструйный; первый предпочтительнее при малых диаметрах трубопровода, второй — при средних и больших. В шариковых тахометрических преобразователях увлекаемый закрученным потоком жидкости шарик движется со скоростью, пропорциональной окружной скорости потока и, следовательно, его объемному расходу. Центробежные силы удерживают шарик на периферии камеры преобразователя и препятствуют уносу его потоком. Шариковые преобразователи уступают крыльчатым в точности [погрешность порядка ± (1,5—2,0)% ], имеют повышенные гидравлические потери и узкий диапазон линейности статической характеристики, но зато работоспособны при значительных загрязнениях потока.