

Кинематический расчет механизма.
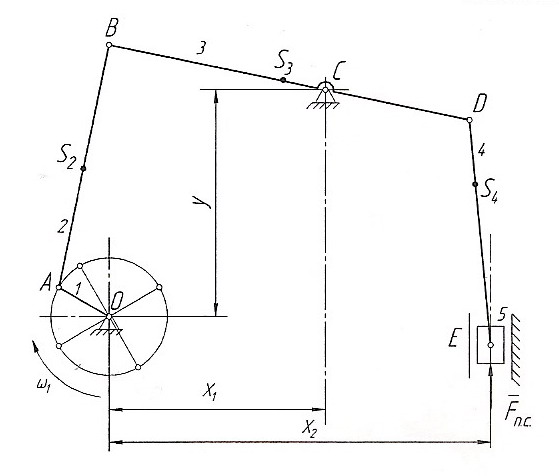
План механизма.
Наименование параметров |
Обозначение |
Размерность |
Величина |
Координаты опор |
Y |
м |
0,84 |
|
X1 |
м |
0,52 |
|
X2 |
м |
0,68 |
Длина кривошипа |
OA |
м |
0,12 |
Длина шатуна |
AB |
м |
0,76 |
|
СB |
м |
0,53 |
|
CD |
м |
0,37 |
Длина шатуна |
DE |
м |
0,64 |
Номер построение для построения планов ускорений |
|
|
4,7,8 |
Угловая скорость кривошипа |
ω1 |
|
5 |
Кинематический анализ механизма.
Структурная формула механизма по формуле Чебышева:
![]()
![]()
O1
1









Группа II класса Группа II класса
2 порядка 2 вида 2 порядка 2 вида
Группа I класса
Определим масштаб плана механизма:
![]() м/мм
м/мм
Планы скоростей.
1. Определяем скорость точки А:
![]() м/с
м/с
2. Определяем масштаб построения планов скоростей:
![]() м/с∙мм
м/с∙мм
3. Рассмотрим движение точки В относительно точки А, а затем относительно точки С.
Запишем два векторных уравнения:

4.Определим скорость точки D относительно точки C:
![]()
5. Определим угловую скорость 2 звена:
![]()
6. Рассмотрим движение точки E относительно точки D, а затем относительно точки К.
Запишем два векторных уравнения.

7. Определяем угловые скорости звеньев механизма.
![]() ;
;
![]()
Таблица скоростей.
№ положения |
|
|
|
|
|
|
0 |
0,6 |
0 |
0 |
0 |
0,6 |
0 |
1 |
0,6 |
0,29 |
0,2 |
0,17 |
0,4 |
0,07 |
2 |
0,6 |
0,53 |
0,37 |
0,33 |
0,13 |
0,1 |
3 |
0,6 |
0,62 |
0,43 |
0,41 |
0,12 |
0,07 |
4 |
0,6 |
0,55 |
0,38 |
0,37 |
0,34 |
0,02 |
5 |
0,6 |
0,3 |
0,21 |
0,21 |
0,52 |
0,01 |
6 |
0,6 |
0,04 |
0,03 |
0,03 |
0,6 |
0,03 |
7 |
0,6 |
0,38 |
0,27 |
0,27 |
0,51 |
0,01 |
8 |
0,6 |
0,57 |
0,4 |
0,39 |
0,23 |
0,03 |
9 |
0,6 |
0,58 |
0,4 |
0,37 |
0,14 |
0,08 |
10 |
0,6 |
0,46 |
0,32 |
0,28 |
0,46 |
0,1 |
11 |
0,6 |
0,26 |
0,18 |
0,15 |
0,62 |
0,12 |
Таблица угловых скоростей.
№ положения |
|
|
|
|||
величина |
направление |
величина |
направление |
величина |
направление |
|
0 |
0,79 |
|
0 |
|
0 |
|
1 |
0,53 |
|
0,55 |
|
0,11 |
|
2 |
0,17 |
|
1 |
|
0,16 |
|
3 |
0,16 |
|
1,17 |
|
0,11 |
|
4 |
0,45 |
|
1,04 |
|
0,03 |
|
5 |
0,68 |
|
0,57 |
|
0,02 |
|
6 |
0,79 |
|
0,08 |
|
0,05 |
|
7 |
0,67 |
|
0,7 |
|
0,02 |
|
8 |
0,3 |
|
1,08 |
|
0,05 |
|
9 |
0,18 |
|
1,09 |
|
0,13 |
|
10 |
0,61 |
|
0,87 |
|
0,16 |
|
11 |
0,82 |
|
0,49 |
|
0,19 |
|

Планы ускорений.
1. Находим ускорение точки А:
![]() м/с²
м/с²
2. Определяем масштаб построения планов ускорений.
![]() м/
с²∙мм
м/
с²∙мм
3. Определяем ускорение точки B относительно точки A, а затем относительно точки C.
Запишем два векторных уравнения:

4. Определяем нормальное ускорение точки В относительно точки А, а затем относительно
точки C.
5. Определяем ускорение точки D.
![]()
6. Определяем ускорение точки E относительно точки D, а затем относительно точки К.

7. Определяем нормальное ускорение точки E относительно точки D.
![]()
7. Определяем угловые ускорения звеньев механизма:
![]()
Таблица ускорений.
№ положения |
|
|
|
|
|
|
|
|
|
|
4 |
3 |
1,7 |
1,18 |
0,93 |
0,152 |
1,83 |
0,571 |
1,6 |
0,0006 |
0,5 |
7 |
3 |
2,73 |
1,9 |
1,83 |
0,342 |
1,78 |
0,258 |
2,7 |
0,00016 |
0,23 |
8 |
3 |
1,15 |
0,8 |
0,48 |
0,07 |
3,38 |
0,592 |
1 |
0,0014 |
0,5 |
Таблица угловых ускорений
№ положения |
|
|
|
|||
величина |
направление |
величина |
направление |
величина |
направление |
|
4 |
2,41 |
|
3,02 |
|
0,78 |
|
7 |
2,34 |
|
5,09 |
|
0,36 |
|
8 |
4,45 |
|
1,89 |
|
0,78 |
|
Строим диаграмму перемещений.
Для определения одного периода оборота кривошипа используем формулу:
![]() с
с
Выбираем масштаб диаграмм перемещений, скоростей и ускорений для определения времени одного периода t:
![]() с/мм
с/мм
Определяем масштаб скоростей:
![]() м/с∙мм
м/с∙мм
Определяем масштаб ускорений:
![]() м/ с²∙мм
м/ с²∙мм
Определяем погрешности скоростей:
![]()
№ положения |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
5,3 |
0 |
1,2 |
2,6 |
9,5 |
8,3 |
0 |
2,5 |
2,6 |
0 |
6,6 |
Определяем погрешности ускорений:
![]()
№ положения |
4 |
7 |
8 |
|
7 |
3,8 |
7,7 |