

-
Решение групповых уравнений
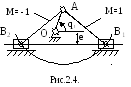
Если групповые уравнения имеют решение, то оно, как правило, является неединственным. Рассмотрим пример (рис. 2.4). Для точки А справедливы соотношения (2.2). Для точки В несложно получить групповые уравнения в виде:
![]()
Решаются эти
уравнения достаточно просто: из второго
уравнения находим sin2,
потом находим
![]() ,
подставляем в первое выражение и находим
xB.
Двум значениям
,
подставляем в первое выражение и находим
xB.
Двум значениям
![]() (положительному и отрицательному)
соответствуют два значения xB
и, соответственно, две конфигурации
механизма: ползун находится либо справа
от точки А, либо слева. Два решения можно
найти и чисто графически, если провести
дугу окружности радиуса АВ из центра А
до пересечения с линией перемещения
ползуна: АВ1
и АВ2.
(положительному и отрицательному)
соответствуют два значения xB
и, соответственно, две конфигурации
механизма: ползун находится либо справа
от точки А, либо слева. Два решения можно
найти и чисто графически, если провести
дугу окружности радиуса АВ из центра А
до пересечения с линией перемещения
ползуна: АВ1
и АВ2.

Таким образом,
одному значению входной обобщенной
координаты q1
соответствуют два решения, из которых
надо оставить одно, а второе отбросить.
В рассматриваемом примере это сделать
достаточно просто: надо выбрать нужный
знак косинуса угла
![]() .
Причем оказывается, что сделать это
надо всего лишь один раз, и для любого
положения механизма этот знак сохраняется.
Механизм не может перескочить из одной
конфигурации (ползун справа от точки
А) в другую (ползун справа от точки А).
Для того, чтобы это произошло, надо
разобрать механизм, переставить звенья
и собрать механизм снова. Поэтому такие
конфигурации механизма называют
сборками.
В данном примере одной сборке соответствует
знак «+» перед косинусом угла
.
Причем оказывается, что сделать это
надо всего лишь один раз, и для любого
положения механизма этот знак сохраняется.
Механизм не может перескочить из одной
конфигурации (ползун справа от точки
А) в другую (ползун справа от точки А).
Для того, чтобы это произошло, надо
разобрать механизм, переставить звенья
и собрать механизм снова. Поэтому такие
конфигурации механизма называют
сборками.
В данном примере одной сборке соответствует
знак «+» перед косинусом угла
![]() ,
а другой – знак «-». Выражение для
косинуса угла
,
а другой – знак «-». Выражение для
косинуса угла
![]() при автоматизированном расчете удобно
представлять в виде:
при автоматизированном расчете удобно
представлять в виде:
![]() ,
где
,
где
![]() - способ
сборки.
Отметим, что в рассматриваемом механизме
все-таки возможен переход из одного
способа сборки в другой без разборки
механизма, но только при одном соотношении
параметров: ОА + е = АВ.
- способ
сборки.
Отметим, что в рассматриваемом механизме
все-таки возможен переход из одного
способа сборки в другой без разборки
механизма, но только при одном соотношении
параметров: ОА + е = АВ.
Для механизма, показанного на рис. 2.1, уравнения (2.2) и (2.3) также могут иметь при одном и том же значении q1 два решения. Второму решению соответствует положение механизма АВ2С (рис. 2.5). Положение механизма АВ1С соответствует одной сборке, а положение АВ2С – другой сборке того же механизма (и, соответственно, двум решениям групповых уравнений). Способ сборки назначается следующим образом. Условно было принято, что положение группы типа ВВВ, при котором обход шарниров в последовательности А,В,С происходит против часовой стрелки, соответствует способу сборки М=1 (положение АВ2С на рис. 2.5); при обходе этих же шарниров по часовой стрелке способ сборки М=-1 (положение АВ1С на рис. 2.5). Из рисунка можно видеть, что в случае, когда АВ+ВС=ОА+ОС, существует положение, при котором возможна утрата первоначального способа сборки и переход в положение с другим способом сборки. Такое положение называют особым или сингулярным. В механизме, в котором оно существует, после прохождения особого положения возможна перемена способа сборки и, следовательно, реализация побочного решения групповых уравнений. Соответственно, механизмом реализуется не та функция положения, которая ожидается. Поэтому при проектировании механизмов следует избегать такого сочетания размеров, при котором возможно особое положение. Далее будет показано, что в особом положении у механизма проявляются и другие негативные факторы. В тех редких случаях, когда все-таки приходится проектировать механизм с особым положением, следует предусмотреть конструктивные меры, однозначно определяющие способ сборки в каждом положении механизма.

В многоподвижных механизмах два неодинаковых решения групповых уравнений, соответствующих одному и тому же значению входных обобщенных координат, могут реализовываться без разборки механизма. Например, на рис. 2.6 изображена трехподвижная платформа, в которой одному и тому же значению координат q1, q2 и q3 соответствует две разные конфигурации группы АВСD: АВ1С1D и АВ2С2D. Из рисунка нетрудно видеть, что для перехода из одной конфигурации в другую не требуется разбирать механизм; достаточно несколько раздвинуть шарниры А и D, варьируя координаты q1 и q2. Это означает, что выбор правильного решения и отбрасывание побочного нельзя осуществить простым заданием способа сборки. Каким же образом можно решить данную проблему при автоматизированном решении групповых уравнений на ЭВМ?
Возможное решение указанной проблемы рассмотрим на следующем примере. Пусть одно решение групповых уравнений (2.5) механизма, показанного на рис. 2.2, каким-то образом уже получено. Координаты, соответствующие этому положению, обозначим знаком (*): q1=q1*, q2=q2*, q3=q3*, 2=2*, 3=3*. Дадим малые приращения входных координат q1, q2, q3. Получим новые значения входных координат: q1=q1*+q1, q2=q2*+q2, q3=q3*+q3. Новому положению механизма соответствуют новые значения выходных координат: 2=2*+2, 3=3*+3. Потребуем, чтобы новое положение было близким к исходному, т.е. чтобы 2 и 3 были малыми величинами. Тогда решение 2 и 3 будет единственным, поскольку второе положение механизма, соответствующее тем же приращениям координат q1, q2 и q3, окажется далеким от исходного положения механизма.
О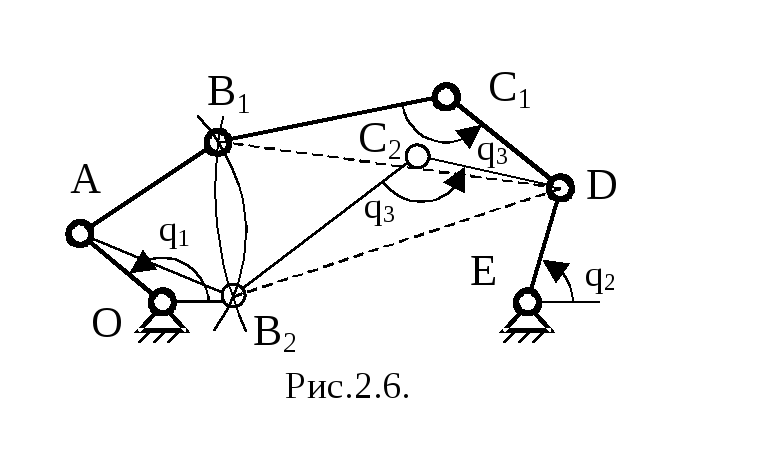 пределим
малые приращения 2
и 3
из уравнений (2.5) и (2.6). При этом предположим,
что приращения хА,
уА,
хD,
уD
уже получены решением групповых уравнений
групп I
и II.
Уравнение (2.5) может быть записано в
следующей обобщенной форме:
пределим
малые приращения 2
и 3
из уравнений (2.5) и (2.6). При этом предположим,
что приращения хА,
уА,
хD,
уD
уже получены решением групповых уравнений
групп I
и II.
Уравнение (2.5) может быть записано в
следующей обобщенной форме:
![]() ,
(2.11)
,
(2.11)
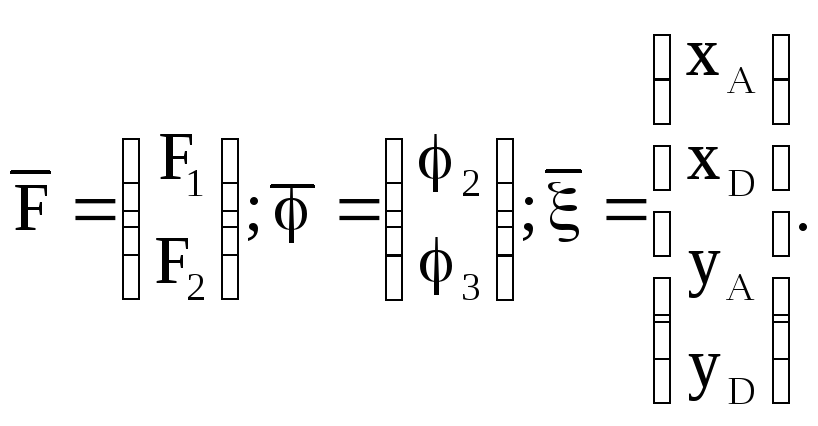
где
![]() - векторы-столбцы:
- векторы-столбцы:
При этом
![]()
![]() (2.12)
(2.12)
Мы ищем решение
![]() векторного уравнения
векторного уравнения
![]() (2.13)
(2.13)
где
![]() и q2
– заданные малые приращения, а
и q2
– заданные малые приращения, а
![]()
![]() удовлетворяют уравнению (2.11). Для
определения
удовлетворяют уравнению (2.11). Для
определения
![]() можно использовать, по предложению
проф. М.З. Коловского, рекуррентную
вычислительную процедуру, известную
как метод
Ньютона или
метод
касательных.
В соответствии с этим методом (k+1) –е
приближение для
можно использовать, по предложению
проф. М.З. Коловского, рекуррентную
вычислительную процедуру, известную
как метод
Ньютона или
метод
касательных.
В соответствии с этим методом (k+1) –е
приближение для
![]() связывается с k-м
при приближенным соотношением
связывается с k-м
при приближенным соотношением
 k=1, 2, … . (2.14)
k=1, 2, … . (2.14)
Доказано, что в
достаточно малой окрестности исходного
решения
![]() последовательность (2.14) сходится, причем
обеспечивается квадратичная сходимость.
Выражение
последовательность (2.14) сходится, причем
обеспечивается квадратичная сходимость.
Выражение

представляет собой матрицу Якоби для системы (2.11), имеющую в рассматриваемом случае следующий вид:
 (2.15)
(2.15)