

А.Н.Евграфов, Г.Н.Петров. Теория механизмов и машин. Лекция 5.
4. Геометрический анализ исполнительных механизмов промышленных роботов
С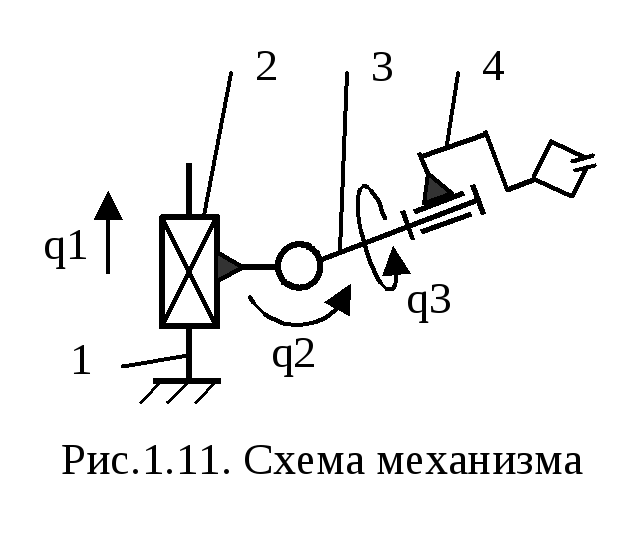 уществуют
механизмы, для которых невозможно
построить функцию положения рассмотренным
ранее способом. Это – разомкнутые
механизмы: для них нельзя составить
условие замыкания. Модель разомкнутого
механизма используется для описания
исполнительных механизмов промышленных
роботов, грузоподъемных механизмов и
т.п. (см., например, рис. 1.11 из лекции 1).
уществуют
механизмы, для которых невозможно
построить функцию положения рассмотренным
ранее способом. Это – разомкнутые
механизмы: для них нельзя составить
условие замыкания. Модель разомкнутого
механизма используется для описания
исполнительных механизмов промышленных
роботов, грузоподъемных механизмов и
т.п. (см., например, рис. 1.11 из лекции 1).
Д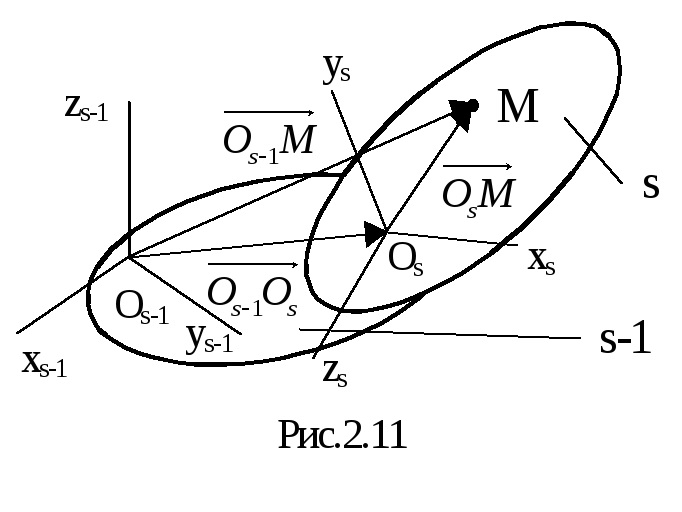 ля
того, чтобы решить указанную проблему,
был предложен следующий метод. Свяжем
с некоторым s-м звеном
исполнительного механизма систему
координат 0sxsyszs,
а со звеном (s-1) –систему координат
0s-1xs-1ys-1zs-1
(рис. 2.11). Составим
вспомогательную табличку, в которой
укажем косинусы углов между осями s-й
и (s-1)-й системами координат:
ля
того, чтобы решить указанную проблему,
был предложен следующий метод. Свяжем
с некоторым s-м звеном
исполнительного механизма систему
координат 0sxsyszs,
а со звеном (s-1) –систему координат
0s-1xs-1ys-1zs-1
(рис. 2.11). Составим
вспомогательную табличку, в которой
укажем косинусы углов между осями s-й
и (s-1)-й системами координат:
Таблица направляющих косинусов
-
Xs
Ys
Zs
Xs-1
Cos(Xs-1,Xs)
Cos(Xs-1,Ys)
Cos(Xs-1,Zs)
Ys-1
Cos(Ys-1,Xs)
Cos(Ys-1,Ys)
Cos(Ys-1,Zs)
Zs-1
Cos(Zs-1,Xs)
Cos(Zs-1,Ys)
Cos(Zs-1,Zs)
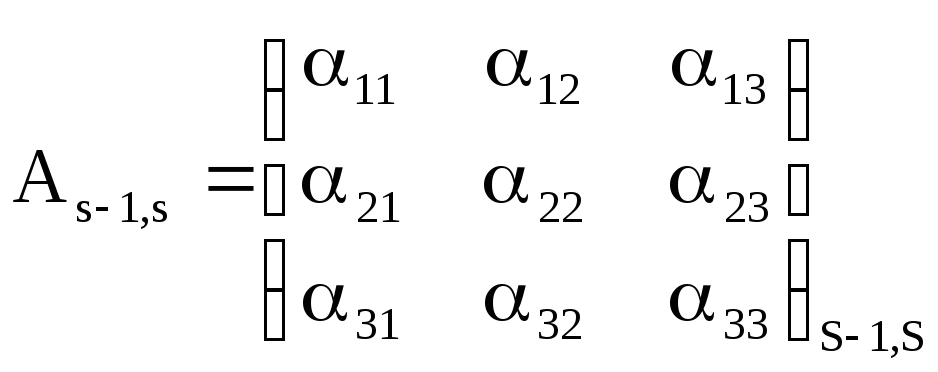
Обычно для краткости эти косинусы обозначают буквами :
-
Xs
Ys
Zs
Xs-1
11
12
13
Ys-1
21
22
23
Zs-1
31
32
33
Элементы этой таблицы имеют следующие свойства:
-
Сумма квадратов косинусов в каждой строке равна единице, т.е.
211 + 212 + 213 = 1;
221 + 222 + 223 = 1;
231 + 232 + 233 = 1;
-
Сумма попарных произведений равна 0, т.е.
11 21+ 1222 + 1323 = 0;
21 31+ 2232 + 2333 = 0;
11 31+ 1232 + 1333 = 0.
Таким образом, все элементы таблицы не являются независимыми, и их можно выразить через три параметра, например, через углы Эйлера.
П оложение
s-й системы координат
относительно (s-1)–й
определяется вектором 0s-10s,
связывающим начала систем координат,
и матрицей направляющих косинусов
Аs-1,s, полученной из
таблицы направляющих косинусов:
оложение
s-й системы координат
относительно (s-1)–й
определяется вектором 0s-10s,
связывающим начала систем координат,
и матрицей направляющих косинусов
Аs-1,s, полученной из
таблицы направляющих косинусов:
 .
(2.39)
.
(2.39)
Матрицы Аs-1,s обладают важным свойством. Если Аs-1,s и Аs,s+1 – матрицы направляющих косинусов между осями соответственно (s-1) –й и s –й и s – й и (s+1) – й систем координат, то
Аs-1,s+1 = Аs-1,s Аs,s+1 (2.40)
П
 усть
на s-м звене имеется
некоторая точка М. Соединив ее с точками
0s-1 и
0s, построим векторы
0s-1M и
0sM.
Для них можно записать следующее
векторное равенство:
усть
на s-м звене имеется
некоторая точка М. Соединив ее с точками
0s-1 и
0s, построим векторы
0s-1M и
0sM.
Для них можно записать следующее
векторное равенство:



0s-1M = 0s-10s + 0sM (2.41)

Вектор 0s-1M может быть задан проекциями на оси какой-либо системы координат, например, (s-1)-й:
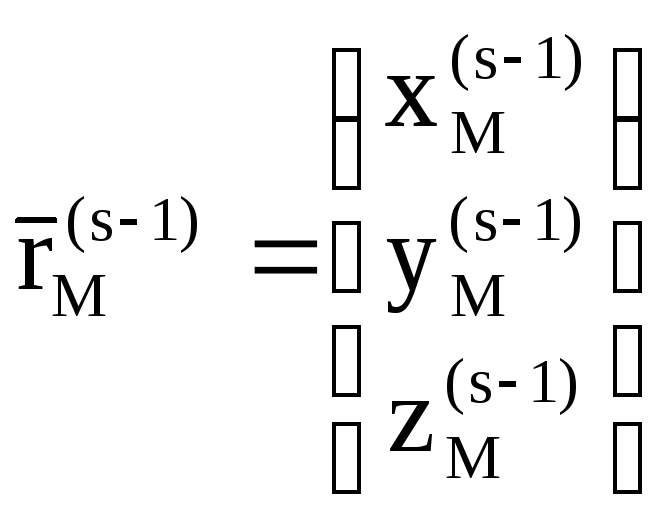 .
(2.42)
.
(2.42)

Аналогично можно задать вектор 0sM проекциями на оси s-й системы координат:
 ,
(2.43)
,
(2.43)
а вектор 0s-10s - проекциями на
оси (s-1) –й системы
координат:
вектор 0s-10s - проекциями на
оси (s-1) –й системы
координат:
 (2.44)
(2.44)
Используя представления (2.42-2.44), можно записать выражение (2.41) в проекциях на оси (s-1)-й системы координат:
![]() (2.45)
(2.45)
Из (2.45) следует, что, если нам известно положение точки М на s-м звене и положение s-го звена относительно (s-1)-го, то можно получить координаты точки М на (s-1)-м звене. Перемещаясь далее к (s-2)-му , (s-3) –му и т.д. звеньям, можно дойти до стойки и получить координаты точки М в неподвижной системе.
В соотношении (2.45) есть некоторое неудобство, заключающееся в том, что операция умножения матриц чередуется с операцией сложения. Для того, чтобы оставить только операции умножения матриц, обычно вводят четырехмерные векторы-столбцы координат:
 ,
,
 , (2.46)
, (2.46)
а также блочные матрицы 4х4:
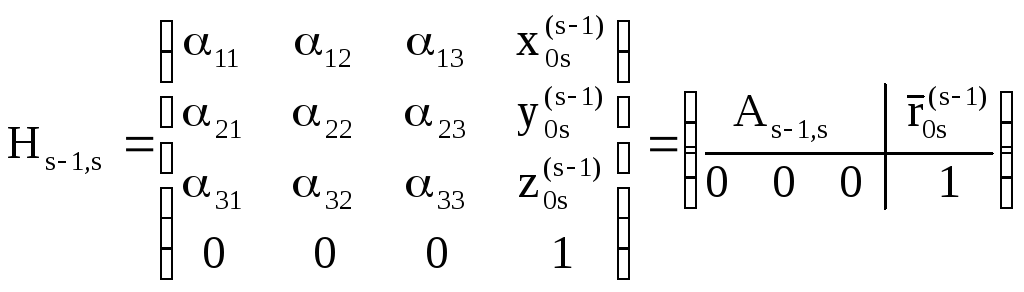 .
(2.47)
.
(2.47)
Матрицы Hs-1,s называются матрицами перехода от s-й системы координат к (s-1)-й системе. Тогда соотношение (2.45) можно записать в виде:
![]() (2.48)
(2.48)
Перемножая последовательно матрицы перехода, можно дойти до неподвижной системы координат:
![]() (2.49)
(2.49)
Здесь
![]() - вектор-столбец координат точки М в
системе, связанной со звеном n,
а
- вектор-столбец координат точки М в
системе, связанной со звеном n,
а
![]() - вектор-столбец координат точки М в
неподвижной системе. Таким образом,
выражение (2.49) дает возможность построить
функцию положения некоторой точки в
явном виде. Для того, чтобы это сделать,
нужно составить матрицы перехода.
Рассмотрим подробнее матрицы перехода
для двух наиболее часто встречающихся
видов кинематических пар – вращательной
и поступательной.
- вектор-столбец координат точки М в
неподвижной системе. Таким образом,
выражение (2.49) дает возможность построить
функцию положения некоторой точки в
явном виде. Для того, чтобы это сделать,
нужно составить матрицы перехода.
Рассмотрим подробнее матрицы перехода
для двух наиболее часто встречающихся
видов кинематических пар – вращательной
и поступательной.
-
Матрица перехода во вращательной кинематической паре.
Пусть звенья s и (s-1) связаны вращательной кинематической парой ( рис. 2.12). Обобщенная координата qs представляет собой угол поворота s-го звена относительно (s-1)-го. Для определенности условимся выбирать систему координат, связанную с s-м звеном, таким образом, чтобы ось 0zs совпадала с осью вращения во вращательной КП.
В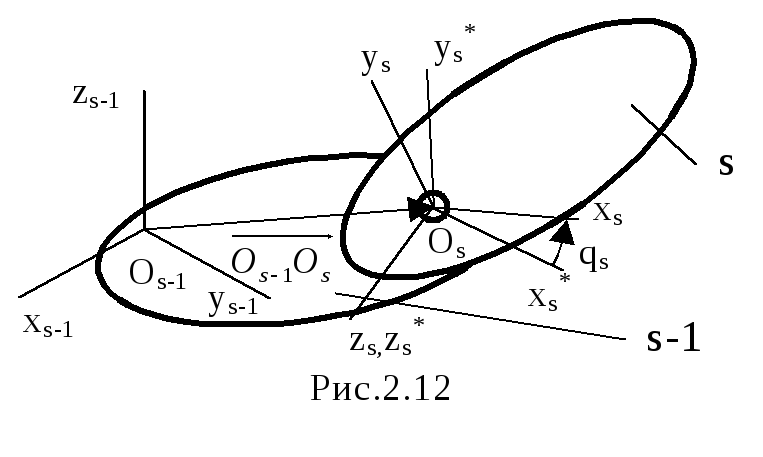 ыберем
некоторое положение звена s за начальное
и обозначим его знаком (*); соответственно
s-я система координат в начальном
положении будет обозначена 0s*хs*уs*zs*.
В результате получили три системы
координат: 0s-1xs-1ys-1zs-1,
связанную со звеном (s-1), 0s*хs*уs*zs*,
определяющую начальное положение s-го
звена относительно (s-1)-го, и 0s*хs*уs*zs*,
связанную с s-м звеном. Угол поворота
системы координат 0sхsуszs
относительно 0s*хs*уs*zs*
является углом qs.
В соответствии с (2.40) матрица направляющих
косинусов Аs-1,s
равна:
ыберем
некоторое положение звена s за начальное
и обозначим его знаком (*); соответственно
s-я система координат в начальном
положении будет обозначена 0s*хs*уs*zs*.
В результате получили три системы
координат: 0s-1xs-1ys-1zs-1,
связанную со звеном (s-1), 0s*хs*уs*zs*,
определяющую начальное положение s-го
звена относительно (s-1)-го, и 0s*хs*уs*zs*,
связанную с s-м звеном. Угол поворота
системы координат 0sхsуszs
относительно 0s*хs*уs*zs*
является углом qs.
В соответствии с (2.40) матрица направляющих
косинусов Аs-1,s
равна:
![]() (2.50)
(2.50)
Матрица Аs-1,s*(0) является постоянной, поскольку начальное положение s-го звена относительно (s-1)-го в процессе работы механизма не меняется. Матрица As*,s(qs) является функцией обобщенной координаты qs. Для ее построения составим таблицу направляющих косинусов.
-
Xs
Ys
Zs
Xs*
Cos(qs)
Cos(qs+/2)
Cos(/2)
Ys*
Cos(3/2+qs)
Cos(qs)
Cos(/2)
Zs*
Cos(/2)
Cos(/2)
Cos(0)
Тогда матрица Аs*,s(qs) равна:
 (2.51)
(2.51)
Матрица Pz(qs) называется матрицей поворота. Матрица перехода во вращательной кинематической паре примет вид:
 (2.52)
(2.52)
Отметим, что в матрице (2.52) переменной составляющей является только матрица поворота (2.51); остальные элементы – постоянные. Начальное положение s* удобно выбирать так, чтобы матрица As-1,s*(0) простой вид.
-
Матрица перехода в поступательной кинематической паре.
П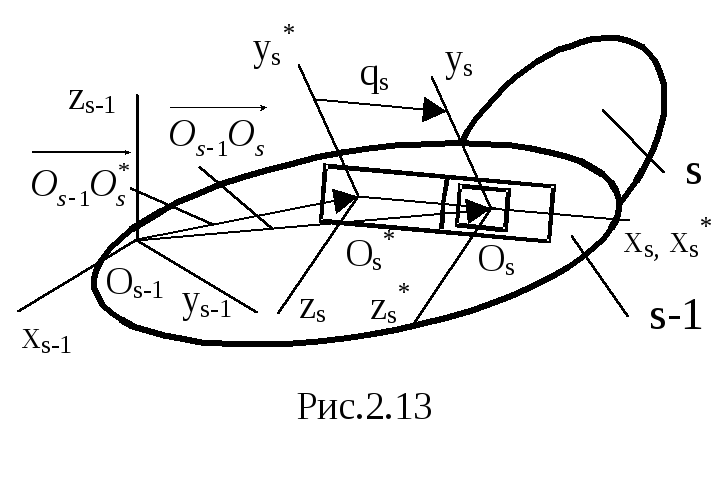 усть
звенья s и (s-1) связаны поступательной
кинематической парой (рис. 2.13), тогда
обобщенная координата qs
– поступательное перемещение звена s
относительно звена (s-1).
Свяжем со звеном (s-1)
систему координат 0s-1xs-1ys-1zs-1,
а со звеном s – систему
координат 0sxsyszs.
Для определенности условимся так
выбирать систему координат 0sxsyszs,
чтобы ось 0хs совпадала
с линией относительного перемещения
звеньев s и (s-1).
Отметим, что в процессе работы механизма
углы между звеньями s и (s-1) и соответствующими
системами координат не
меняются, поэтому Аs-1,s=const;
перемещается точка отсчета 0s относительно
звена (s-1). Пусть в начальном положении
при qs
= 0 система 0sxsyszs
занимает положение 0s*xs*ys*zs*.
Начальное положение определяется
вектором
усть
звенья s и (s-1) связаны поступательной
кинематической парой (рис. 2.13), тогда
обобщенная координата qs
– поступательное перемещение звена s
относительно звена (s-1).
Свяжем со звеном (s-1)
систему координат 0s-1xs-1ys-1zs-1,
а со звеном s – систему
координат 0sxsyszs.
Для определенности условимся так
выбирать систему координат 0sxsyszs,
чтобы ось 0хs совпадала
с линией относительного перемещения
звеньев s и (s-1).
Отметим, что в процессе работы механизма
углы между звеньями s и (s-1) и соответствующими
системами координат не
меняются, поэтому Аs-1,s=const;
перемещается точка отсчета 0s относительно
звена (s-1). Пусть в начальном положении
при qs
= 0 система 0sxsyszs
занимает положение 0s*xs*ys*zs*.
Начальное положение определяется
вектором
![]() . Найдем вектор
. Найдем вектор
![]() :
:
 (2.53)
(2.53)
Составим матрицу перехода в поступательной паре:
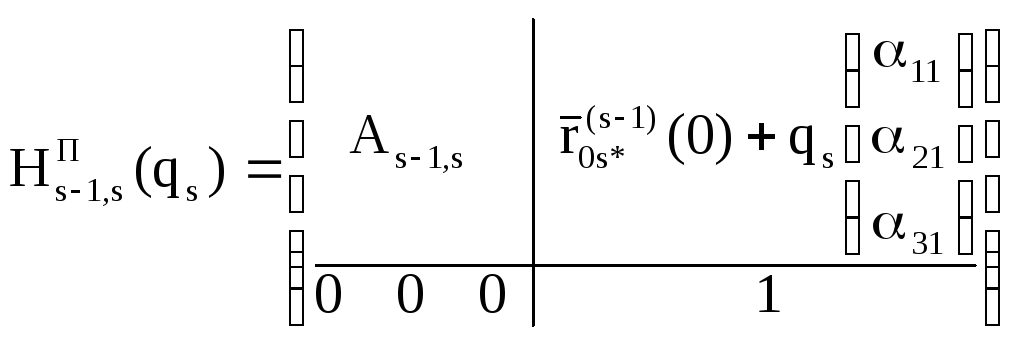 (2.54)
(2.54)
Подчеркнем, что в матрице (2.54) переменным является только второй блок, определяющий положение точки 0s в системе координат (s-1).
Рассмотрим пример
(рис. 2.14). Исполнительный механизм
промышленного робота состоит из трех
подвижных звеньев, связанных тремя
кинематическими парами: двумя вращательными
и одной поступательной. Из формулы
Малышева следует, что механизм обладает
тремя степенями подвижности: W=6(4-1)-53=3.
Следовательно, надо задать три обобщенные
координаты: q1,
q2,
q3.
Свяжем с каждым из подвижных звеньев
локальные системы координат 01x1y1z1,
02x2y2z2,
03x3y3z3
так, как показано на рисунке. Зададим
начальное положение каждой из систем
координат: 01*x1*y1*z1*,
02*x2*y2*z2*,
03*x3*y3*z3*.
Для удобства зададим начальное положение
звена 1 так, чтобы система координат
01*x1*y1*z1*
совпадала с неподвижной системой
0x0y0z0. Зададим
конструктивные параметры схемы a,
b, c и входные обобщенные координаты
q1,
q2,
q3.
Требуется построить ф ункцию
положения точки М, принадлежащей третьему
звену, или, иначе говоря, найти координаты
точки М в неподвижной системе отсчета
ункцию
положения точки М, принадлежащей третьему
звену, или, иначе говоря, найти координаты
точки М в неподвижной системе отсчета
 .
.
Р ешение.
Положение точки М в системе координат
03х3у3z3
можно задать вектором-столбцом:
ешение.
Положение точки М в системе координат
03х3у3z3
можно задать вектором-столбцом:
 .
.
В соответствии с
(2.49)
![]() .
Составим матрицы перехода.
.
Составим матрицы перехода.

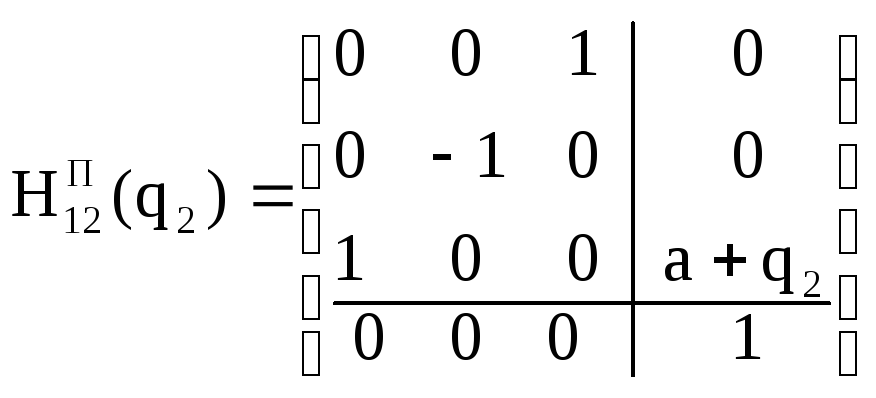
Для составления матрицы А12 построим таблицу направляющих косинусов:
-
X2
Y2
Z2
X1
0
0
1
Y1
0
-1
0
Z1
1
0
0
Тогда матрица перехода Н12(q2):
Для построения матрицы А23*(0) составим таблицу направляющих косинусов:
-
X3*
Y3*
Z3*
X2
0
1
0
Y2
-1
0
0
Z2
0
0
1
Найдем матрицу
перехода
![]() :
:

Подставляя найденные матрицы перехода, получим:

Окончательное
выражение для
![]() получить самостоятельно.
получить самостоятельно.