

3.4.1. Автомобильный дифференциал
Н аиболее
массовое использование дифференциальных
механизмов – в автомобилестроении. Они
решают следующую проблему. При повороте
автомобиля ведущие колеса проходят
разный путь (рис.3.33, а),
следовательно, они вращаются с разными
скоростями, поэтому соединить их одним
валом нельзя. Нужно поставить между
колесами такой механизм, который
компенсирует разницу угловых скоростей.
Для этой цели используется автомобильный
дифференциал (рис.3.33, б).
аиболее
массовое использование дифференциальных
механизмов – в автомобилестроении. Они
решают следующую проблему. При повороте
автомобиля ведущие колеса проходят
разный путь (рис.3.33, а),
следовательно, они вращаются с разными
скоростями, поэтому соединить их одним
валом нельзя. Нужно поставить между
колесами такой механизм, который
компенсирует разницу угловых скоростей.
Для этой цели используется автомобильный
дифференциал (рис.3.33, б).
От двигателя крутящий момент передается через коробку скоростей, карданный вал и зубчатую передачу (например, гипоидную) на водило Н. Вращаясь, водило приводит в движение сателлит z2, который зацепляется с коническими колесами z1 и z3, жестко связанными с ведущими колесами автомобиля.
Найдем соотношение
угловых скоростей зубчатых колес.
Передаточное отношение дифференциала
при неподвижном водиле
![]() равно:
равно:
 .
(3.62)
.
(3.62)
Знак передаточного отношения конического зубчатого механизма можно определить по правилу «стрелок»: задав направление вращения колеса z1 стрелкой, направленной вверх, получаем, что колесо z2 должно вращаться навстречу (стрелка направлена направо); отсюда получаем направление вращения колеса z3 (стрелка направлена вниз). Сравнивая направление стрелок у колес z1 и z3, видим, что направление вращения колес z1 и z3 противоположное, т.е. передаточное отношение от колеса z1 к колесу z3 (при неподвижном водиле) отрицательное. Тот же результат можно получить следующим рассуждением. Угол между векторами угловой скорости вращения колеса z1 и колеса z2 равен 900; угол между векторами угловой скорости вращения колеса z2 и колеса z3 также равен 900; итого суммарный угол поворота угловой скорости вращения колес z1 и z3 равен 1800, т.е. направление вращения колес z1 и z3 взаимно противоположное.
При одинаковом числе зубьев колес z1=z2=z3 получим из выражения (3.62):
 .
(3.63)
.
(3.63)
Отсюда следует, что
![]() .
(3.64)
.
(3.64)
На ровной дороге
водило вращается с той же угловой
скоростью, что и колеса z1
и z3:
1
= 3
= Н.
При этом колеса z1,
z2,
z3
и водило Н
вращаются как одно звено. На неровностях
дороги и на поворотах одно из колес
начинает вращаться настолько же
медленнее, насколько второе – быстрее,
чем водило (![]() ),
а зубчатое колесо z2
начинает вращаться вокруг своей оси
симметрии, компенсируя разность угловых
скоростей z1
и z3
и, следовательно, ведущих колес автомобиля.
),
а зубчатое колесо z2
начинает вращаться вокруг своей оси
симметрии, компенсируя разность угловых
скоростей z1
и z3
и, следовательно, ведущих колес автомобиля.
Наличие дифференциала объясняет явление, которое называют пробуксовкой ведущих колес. Рассмотрим условие равновесие колеса z2 (в рамках статической модели). На него действуют: движущая сила RН2, действующая со стороны водила, и силы сопротивления R12 и R32, действующие со стороны колес z1 и z3 соответственно (рис.3.34). Момент реакции R12 уравновешивается моментом реакции R32, следовательно,
![]()
 .
(3.65)
.
(3.65)
Отсюда следует, что R12 = R32. Каждая из этих сил создает движущие моменты на валах колес z1 и z3. При z1 = z3 радиусы этих колес равны, следовательно, равны и движущие моменты на ведущих колесах автомобиля. Если одно из ведущих колес не встречает сопротивления, то движущий момент на этом колесе равен нулю, следовательно, движущий момент и на втором ведущем колесе равен нулю. Автомобиль буксует. Для того, чтобы устранить пробуксовку, надо либо заблокировать дифференциал, либо добавить сопротивление на то колесо, где его нет или оно мало.
Билет № 25. Гиперболоидные передачи (винтовая, гипоидная, червячная).
Гиперболоидная передача, зубчатая передача для осуществления вращения между произвольно расположенными, не лежащими в одной плоскости осями, при постоянном передаточном числе. Начальные поверхности (аксоиды) колёс в Гиперболоидная передача являются частями гиперболоидов вращения и соприкасаются по прямой линии. В качестве начальных поверхностей гиперболоидных зубчатых колёс используются либо произвольно вырезанные сопряжённые части гиперболоидов, либо части, вырезанные из их горловин. Вследствие сложности изготовления гиперболоидных зубчатых колёс Гиперболоидная передача практически не применяются. Для передачи вращения между осями, не лежащими в одной плоскости, используют винтовые зубчатые передачи, в колёсах которых части, вырезанные из горловин гиперболоидов, заменены цилиндрами, или гипоидные передачи, в колёсах которых части гиперболоидов заменены усечёнными конусами.
Винтовая зубчатая передача, цилиндрическая зубчатая передача винтовыми колёсами между перекрещивающимися валами. В основном применяются Винтовая зубчатая передача с межосевым углом 90° (рис.). Перекрещивание валов позволяет выводить оба вала передачи за её пределы в разных направлениях, что даёт возможность передавать вращение от одного вала к нескольким другим. В связи с точечным контактом зубьев и большим скольжением в зацеплении Винтовая зубчатая передача склонны к быстрому износу и заеданию даже при небольших нагрузках, поэтому их применяют главным образом в кинематических цепях приборов.
Гипоидная передача (сокращенное от гиперболоидная), особый вид винтовой зубчатой передачи, осуществляемой коническими колёсами со скрещивающимися осями.
Червя́чная переда́ча (зубчато-винтовая передача) — механическая передача, осуществляющаяся зацеплением червяка и сопряжённого с ним червячного колеса
Билет № 26. Геометро-кинематические условия существования передачи.
Для того, чтобы передача существовала, должны выполняться некоторые условия. Рассмотрим их.
-
П
 остоянство
передаточного отношения.
остоянство
передаточного отношения.
Ранее рассматривалась основная теорема зацепления для сопряженных профилей (рис. 3.22).
![]()
Для того, чтобы передаточное отношение i12 было постоянным, необходимо, чтобы полюс зацепления занимал постоянное положение.
-
У
 гол
перекрытия.
п
– это угол поворота зубчатого колеса
от положения входа зуба в зацепление
до его выхода из зацепления.
гол
перекрытия.
п
– это угол поворота зубчатого колеса
от положения входа зуба в зацепление
до его выхода из зацепления.
Угловой
шаг
– это центральный угол, равный
![]() (рис. 3. 40, а).
(рис. 3. 40, а).
К
![]() .
(3.69)
.
(3.69)
-
Равенство шагов. В передаче должна обеспечиваться возможность одновременного контакта нескольких поверхностей зубьев
-
Подрезание. При нарезании зубчатого колеса возможно подрезание зубьев, которое проявляется в утонении ножки зуба, приводящем к уменьшению изгибной прочности зуба (рис. 3.40, б).
-
З
 аострение.
Заострение зубьев
возникает тогда, когда точка пересечения
разноименных теоретических профилей
зуба располагается внутри окружности
вершин (рис. 3.40, в).
аострение.
Заострение зубьев
возникает тогда, когда точка пересечения
разноименных теоретических профилей
зуба располагается внутри окружности
вершин (рис. 3.40, в).
-
Интерференция. Явление интерференции зубьев заключается в том, что происходит контакт по нерабочей части поверхности зуба.
Билет № 27. Свойства эвольвенты окружности и эвольвентного зацепления.
В качестве главного профиля зубьев
цилиндрических зубчатых колес, применяемых
в машиностроении, наибольшее распространение
получил эвольвентный профиль. Плоская
эвольвента окружности представляет
собой траекторию любой точки прямой
линии, перекатываемой без скольжения
по эволюте, т.е. по основной окружности
радиуса rb
(рис.3.42). Перекатываемая по основной
окружности прямая называется производящей
прямой.
Рассмотрим более подробно свойства
эвольвенты окружности.
качестве главного профиля зубьев
цилиндрических зубчатых колес, применяемых
в машиностроении, наибольшее распространение
получил эвольвентный профиль. Плоская
эвольвента окружности представляет
собой траекторию любой точки прямой
линии, перекатываемой без скольжения
по эволюте, т.е. по основной окружности
радиуса rb
(рис.3.42). Перекатываемая по основной
окружности прямая называется производящей
прямой.
Рассмотрим более подробно свойства
эвольвенты окружности.
-
Нормаль к эвольвентам (прямая КС) касается основной окружности, причем точка касания (С) является центром кривизны эвольвент.
-
Все эвольвенты одной основной окружности эквидистантны, и расстояние KD между ними равно длине дуги К0D0.
-
Каждая ветвь эвольвенты вполне определяется радиусом основной окружности и положением начала отсчета эвольвентного угла.
-
Эвольвента не имеет точек внутри основной окружности.
Из свойств эвольвенты вытекают свойства эвольвентного зацепления. Пусть профиль зуба колеса 1 (рис.3.43) очерчен по эвольвенте основной окружности с радиусом rb1, а профиль зуба колеса 2 – по эвольвенте основной окружности радиуса rb2. Поместим центры этих окружностей в центры вращения 01 и 02. Нормаль к эвольвенте первого колеса должна быть касательной к основной окружности первого колеса, а нормаль к эвольвенте второго колеса должна быть касательной к основной окружности второго колеса. В точке касания эвольвент нормаль должна быть общей к обоим профилям, и, следовательно, точка контакта лежит на общей касательной к основным окружностям. При вращении ведущего колеса 1 против часовой стрелки, а ведомого колеса 2 – по часовой (рис.3.43, а) точка касания эвольвент перемещается по отрезку В1В2 этой касательной, т.к. вне отрезка В1В2 эвольвенты не могут касаться, т.е. иметь общую нормаль; В1В2 является линией зацепления.
Т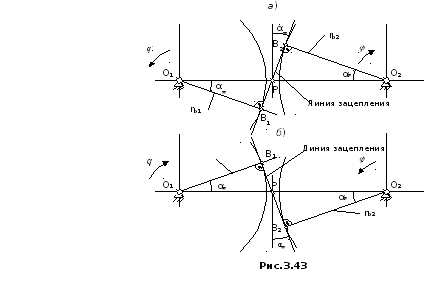 очка
пересечения общей нормали к эвольвентам
с линией межосевого расстояния 0102
является полюсом зацепления Р
и занимает неизменное положение.
очка
пересечения общей нормали к эвольвентам
с линией межосевого расстояния 0102
является полюсом зацепления Р
и занимает неизменное положение.
Если направление вращение ведущего колеса 1 и ведомого колеса 2 изменится, то линия зацепления В1В2, по которой перемещается точка контакта, займет новой положение (рис.3.43, б).
Угол между линией зацепления В1В2 и прямой, перпендикулярной линии межосевого расстояния, называется углом зацепления и обозначается через w. Углы РВ101 и РВ202 равны углу зацепления w как углы с соответственно перпендикулярными сторонами. Поскольку Р01 = rw1, а Р02 = rw2, то
![]() .
(3.87)
.
(3.87)
Следовательно, при эвольвентном зацеплении передаточное отношение может быть выражено через отношение радиусов основных окружностей:
 ,
(3.88)
,
(3.88)
причем знак плюс относится к внутреннему зацеплению, а знак минус – к внешнему.
Из формулы (3.88) видно, что при эвольвентном зацеплении изменение межосевого расстояния не влияет на значение передаточного отношения вследствие неизменности радиусов основных окружностей. При изменении межосевого расстояния изменяются лишь радиусы начальных окружностей и угол зацепления.
С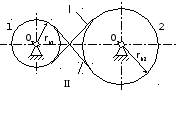 войства
эвольвентного зацепления иллюстрирует
аналогия с перекрестно-ременной передачей
(рис.3.44). Линия зацепления как бы
сматывается с ведущего шкива 1
радиуса rb1
и наматывается на шкив 2
радиуса rb2
(ветвь I
при вращении ведущего шкива 1
против часовой стрелки и ветвь II
при вращении шкива 1
по часовой стрелке). При изменении
межосевого расстояния 0102
передаточное отношение, обратно
пропорциональное отношению радиусов
шкивов rb2
и rb1,
не изменяется.
войства
эвольвентного зацепления иллюстрирует
аналогия с перекрестно-ременной передачей
(рис.3.44). Линия зацепления как бы
сматывается с ведущего шкива 1
радиуса rb1
и наматывается на шкив 2
радиуса rb2
(ветвь I
при вращении ведущего шкива 1
против часовой стрелки и ветвь II
при вращении шкива 1
по часовой стрелке). При изменении
межосевого расстояния 0102
передаточное отношение, обратно
пропорциональное отношению радиусов
шкивов rb2
и rb1,
не изменяется.
Билет №28. Исходные контуры эвольвентных колес