

7. Задати деяке значення коефіцієнта передачі каналу компенсування Кv і виконати
дії, вказані в пунктах 4 і 5.
8. Порівняти побудовані графіки Ω=f(Мн) попереднім результатом досліду. Оцінити, має місце недокомпенсування чи пере компенсування впливу моменту навантаження на швидкість обертання двигуна.
9. За допомогою задавача коефіцієнта передачі каналу компенсування Кv виконати повне компенсування впливу сигналу моменту навантаження на вихідний сигнал моделі системи керування. Визначити значення коефіцієнта передачі Кv, при якому має місце повне компенсування.
1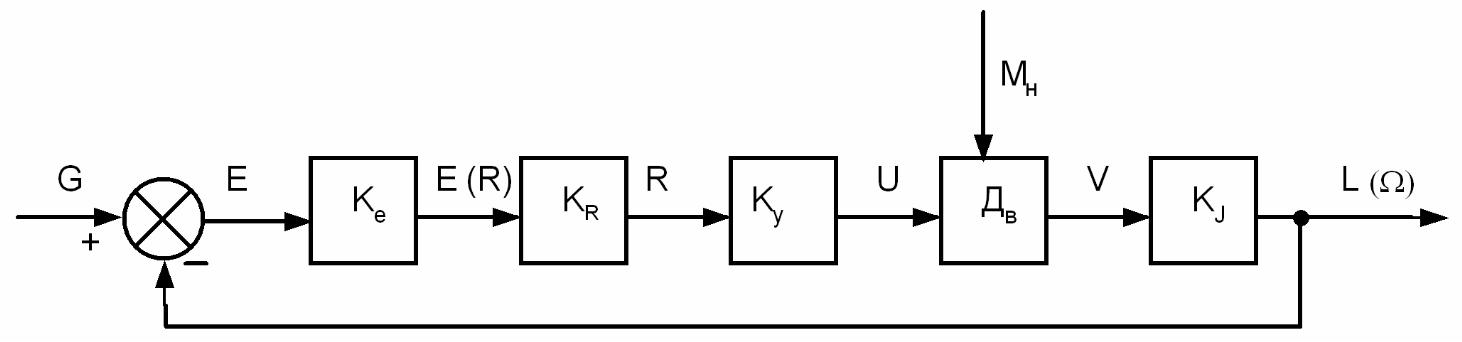 0.
Скласти модель системи автоматичного
керування швидкістю обертання двигуна
постійного струму з використанням
каналу зворотного зв’язку за швидкістю
обертання двигуна, схема якої наведена
на рис.2.3
0.
Скласти модель системи автоматичного
керування швидкістю обертання двигуна
постійного струму з використанням
каналу зворотного зв’язку за швидкістю
обертання двигуна, схема якої наведена
на рис.2.3
Рисунок 2.3
11. Задати статичні коефіцієнти передачі ланок моделі системи керування, які дорівнюють відповідно: Ке=2, КR=Ку=Кj=1 – тобто забезпечити виконання умови
Ке КR Ку Кj =Кр=2.
12. Задати на вході моделі системи керування сигнал за давального діяння G=5В. Визначити значення вихідного сигналу моделі системи при заданні сигналу моменту навантаження Мн=(0,1,2,4)В. Побудувати графік залежності вихідного сигналу моделі системи керування від сигналу моменту навантаження Мн при незмінному сигналі задавального діяння G. Повторити вказані дії при G=7 В.
13. За допомогою перемикача «Ту» ввести інерційність у модель підсилювача потужності, а за допомогою перемикача «Тд» задати електромеханічну сталу часу двигуна, яка дорівнює 0,5с. Подати на вхід моделі системи керування ступінчастий сигнал G=5В. Накреслити осцилограму реакції моделі системи керування на ступінчастий вхідний сигнал, зазначивши масштаб за часом і за напругою.
14.Збільшити статистичні коефіцієнти передачі ланок таким чином, щоб забезпечити виконання умови
Ке КR Ку Кj = Кр = 10.
і повторити дії, вказані в пунктах 12 і 13.
15. Аналогічним шляхом забезпечити виконання умови
Кр =25.
і повторити дії, вказані в пунктах 12 і 13.
Хід роботи
Таблиця 2.1 – залежність вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при задавальному діянні G = 5B (пункт 3)
Мн |
0 |
1 |
2 |
4 |
Ω |
5 |
4 |
3,3 |
1 |
Рисуно 2.4
Таблиця 2.2 – залежність вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при задавальному діянні G = 7B (пункт 5)
Мн |
0 |
1 |
2 |
4 |
Ω |
7 |
6,3 |
5,5 |
3,5 |
Рисунок 2.5
Таблиця 2.3 – залежність вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при задавальному діянні G = 5B (пункт 7)
Мн |
0 |
1 |
2 |
4 |
Ω |
5 |
4,2 |
3,9 |
3 |
Рисунок 2.6
Таблиця 2.4 – залежність вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при задавальному діянні G = 7B (пункт 7)
Мн |
0 |
1 |
2 |
4 |
Ω |
7 |
6,8 |
6,3 |
5,2 |
Рисунок 2.7
Пункт 8 – порівнявши побудовані графіки Ω = f(Мн) ми даємо висновок, що має місце недокомпенсації впливу моменту навантаження на швидкість обертання двигуна.
Пункт 9 – за допомогою задавача коефіцієнта передачі каналу компенсування Kv виконуємо повне компенсування впливу сигналу моменту навантаження на вихідний сигнал моделі системи керування, попередньо визначивши, що повне компенсування має місце при Kv = 1.
Таблиця 2.5 – залежність вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при задавальному діянні G = 5B(пункт 12)
Мн |
0 |
1 |
2 |
4 |
Ω |
3 |
2,9 |
2,7 |
2 |
Рисунок 2.8
Таблиця 2.6 – залежність вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при задавальному діянні G = 7B(пункт 12)
Мн |
0 |
1 |
2 |
4 |
Ω |
4,9 |
4,3 |
4 |
3,5 |
Рисунок 2.9
Пункт 13
Рисунок 2.10 – Осцилограма реакції моделі системи керування на ступінчатий вхідний сигнал
Таблиця 2.7 – залежність вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при задавальному діянні G = 5B(пункт 14)
Мн |
0 |
1 |
2 |
4 |
Ω |
4,8 |
4,7 |
4,5 |
4,3 |
Рисунок 2.11
Таблиця 2.8 - залежність вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при задавальному діянні G = 7B(пункт 14)
Мн |
0 |
1 |
2 |
4 |
Ω |
6,8 |
6,6 |
6,5 |
6,2 |
Рисунок 2.12
Рисунок 2.13 – Осцилограма реакції моделі системи керування на ступінчатий вхідний сигнал
Таблиця 2.9 - залежність вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при задавальному діянні G = 5B(пункт 15)
Мн |
0 |
1 |
2 |
4 |
Ω |
4,8 |
4,8 |
4,7 |
4,7 |
Рисунок 2.14
Таблиця 2.10 - залежність вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при задавальному діянні G = 7B(пункт 15)
Мн |
0 |
1 |
2 |
4 |
Ω |
7 |
7 |
7 |
7 |
Рисунок 2.15
Рисунок 2.16 – Осцилограма реакції моделі системи керування на ступінчатий вхідний сигнал
Висновок: на даній лабораторній роботі ми дослідили найпростіший спосіб керування швидкістю обертання двигуна постійного струму і визначили, що даний спосіб має недокомпенсування впливу моменту навантаження на швидкість обертання двигуна. Також дослідили явище повної компенсації збурення, тобто таке до якого повинні максимально наближатись САК. Повне компенсування має місце при коефіцієнті передачі каналу компенсування Kv = 1. Визначили, що чим більший коефіцієнт передачі розімкненої системи, тим точніший результат.