

Лабораторна робота №2 Дослідження принципів керування за збуренням і за відхиленнямна стенді сау-21тк
Мета роботи: експериментальне дослідити принципи керування, які використовуються в системах автоматичного керування.
Стислі теоретичні відомості
При розв'язанні задач керування різними об'єктами і процесами використовуються принципи керування за збуренням. за відхиленням, а також комбіноване керування.
Керування за збуренням . це таке керування, при якому негативний вплив збурення на керовану величину компенсується шляхом вимірювання цього збурення і формування відповідного йому додаткового керуючого діяння на об'єкт керування. Це додаткове діяння викликає зміну керованої величини в бік. протилежний прямій дії збурення на керовану величину.
Керування за відхиленням це таке керування, при якому знаходять відхилення керованої величини від її задання. І формують таке керуючедіяння на об'єкт керування, яке викликає зміну керованої величини в бік зменшення вказаного відхилення.
Основними перевагами керування за збуренням є:
можливість повного компенсування впливу контрольованого збурення на керовану величину;
незалежність динамічних властивостей системи керування від параметрів каналу компенсування впливу збурення на керовану величину.
Основні недоліки керування за збуренням:
необхідність вимірювання збурення і знання точного математичного опису об'єкта керування;
висока чутливість показників якості керування до відхилень параметрів об'єкта керування і параметрів каналу компенсування впливу збурення від їхніх номінальних значень.
Основними перевагами керування за відхиленням є:
можливість компенсування впливу неконтрольованих збурень на керовану величину.
низька чутливість показників якості керування до відхилень параметрів системи керування від їх номінальних значень.
Основні недоліки керування за відхиленням:
наявність зворотного зв'язку може призвести до нестійкості процесу керування об'єктом;
звичайно нижча швидкодія системи керування порівняно з керуванням за збуренням.
Програма роботи
1.Дослідити якість найпростішого способу керування швидкістю обертання двигуна постійного струму (без використання каналу компенсування впливу моменту навантаження та каналу зворотного зв'язку за швидкістю обертання).
2.Дослідити якість керування швидкістю обертання двигуна з використанням каналу компенсування впливу моменту завантаження на швидкість обертання.
3.Дослідити якість керування швидкістю обертання двигуна з використанням каналу зворотного зв'язку за швидкістю обертання.
Послідовність виконання роботи
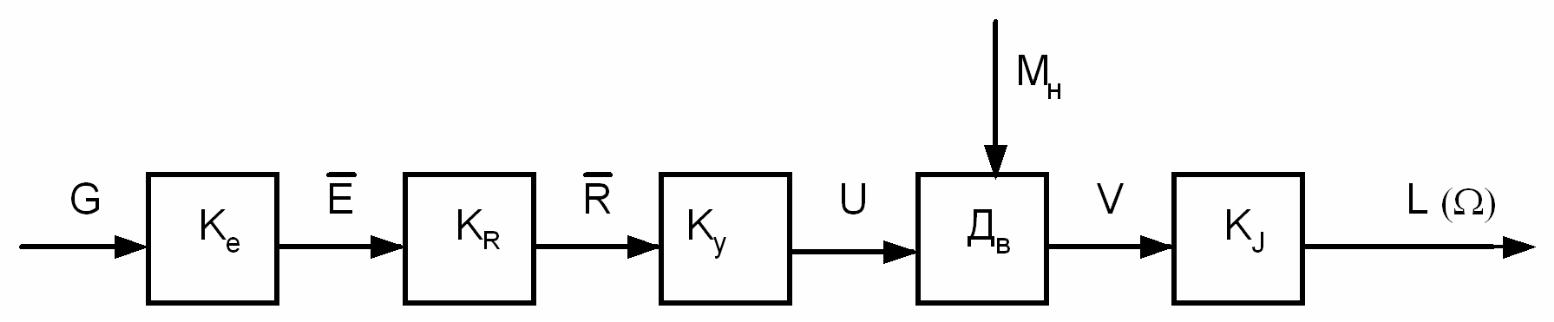 1.На
лицьовій панелі стенда САУ-21ТК скласти
модель найпростішої системи автоматичного
керування швидкістю обертання двигуна
постійного струму, схема якої наведена
на рис.2.1.
1.На
лицьовій панелі стенда САУ-21ТК скласти
модель найпростішої системи автоматичного
керування швидкістю обертання двигуна
постійного струму, схема якої наведена
на рис.2.1.
Рисунок 2.1
2. Задати статичні коефіцієнти передачі ланок моделі системи керування такими, що дорівнюють одиниці, тобто Ке=КR=Ку=Кj=1.
3. Задати на вході моделі системи керування сигнал задавального діяння G=5В, а сигнал моменту навантаження Мн=0В. Впевнитись, що на виході моделі системи сформувався сигнал Ω=5В.
4. Визначити значення вихідного сигналу моделі системи Ω при заданні сигналу моменту навантаження Мн=(1,2,4)В. Побудувати графік залежності вихідного сигналу моделі системи Ω від сигналу моменту навантаження Мн при незмінному сигналі задавального діяння G.
5. Задати на вході моделі системи керування сигнал G=7В. Повторити дії вказані у пункті 4.
6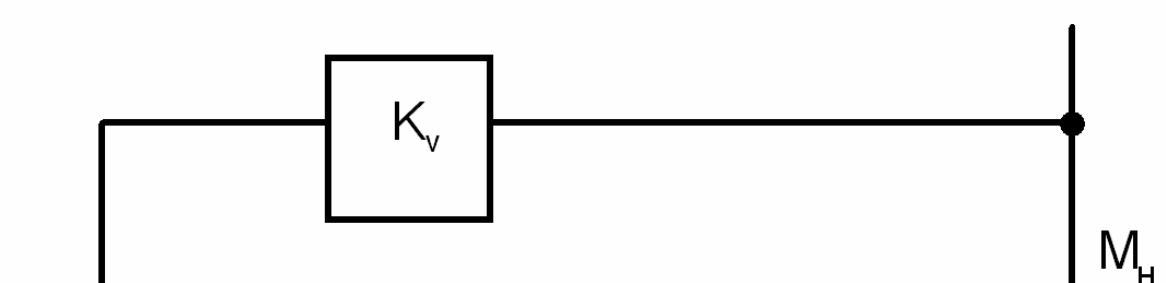 .
Скласти модель системи автоматичного
керування швидкістю обертання двигуна
постійного струму з використанням
каналу компенсування впливу моменту
навантаження на швидкість обертання
валу двигуна, схема якої зображена на
рис.2.2.
.
Скласти модель системи автоматичного
керування швидкістю обертання двигуна
постійного струму з використанням
каналу компенсування впливу моменту
навантаження на швидкість обертання
валу двигуна, схема якої зображена на
рис.2.2.

Рисунок 2.2