

Рисунки до задач д. 11. 0. – д. 11. 3.

Рисунки до задач д. 11. 4. – д. 11. 6.

Рисунки до задач д .11. 7. – д. 11. 9.
де Т –
кінетична енергія
системи;
![]() –
узагальнена сила,
що відповідає координаті q1;
Q2 –
узагальнена сила, що відповідає координаті
q2.
–
узагальнена сила,
що відповідає координаті q1;
Q2 –
узагальнена сила, що відповідає координаті
q2.
В загальному випадку кінетична енергія системи дорівнює сумі кінетичних енергій всіх тіл, що входять в систему:
![]()
Для тіл, які відсутні в системі (прочерк у відповідному стовпчику) і тіл, маса яких дорівнює нулю (нуль у відповідному стовпчику), кінетична енергія дорівнює нулю.
Розв’язання задачі Д.11 необхідно починати з вибору узагальнених координат:
![]()
де x – подовження пружини, яке вимірюється в бік того з тіл 3, 4 або 5, до якого прикріплена пружина. Наприклад, якщо пружина прикріплена в точці А, то її довжина в довільній момент часу дорівнює АВ і
![]()
де
![]() – довжина
недеформованої пружини;
– довжина
недеформованої пружини;
φ – кут повороту крайнього блока, який при цьому може бути і невагомим. Кут φ необхідно відраховувати від початкового положення блока. Якщо блоки 1 і 2 в систему не входять, а входять лише тіла 3 і 4, необхідно покласти
![]() ,
,
де y – відстань тіла 4 від початкового положення. Відповідні приклади дані на рис. Д.11.10 а, б, в.
Хід розв’язання подано в прикладах, що наведені нижче. У всіх прикладах необхідно врахувати, що тіло 3 здійснює складний рух i
![]()
де
![]() .
Переносну швидкість
.
Переносну швидкість
![]() необхідно знайти відповідно до рисунка
задачі.
необхідно знайти відповідно до рисунка
задачі.
За правильне розв’язання задачі Д.11 з використанням даних таблиці Д.11.0–Д.11.9 студент одержує оцінку „задовільно”. За правильне розв’язання задачі Д.11 з використанням даних таблиці Д.11.0.А–Д.11.9.А студент одержує оцінку „добре”, а з використанням даних таблиці Д.11.0.Б–Д.11.9.Б – оцінку „відмінно”.
Приклад розв’язання задачі Д.11. Перший рівень складності.
Механічна система (рис. 21.32 ) складається з блоків 1 і 2, вага яких відповідно дорівнює Р1=4Р і Р2=0, візка 4 ваги Р4=5Р та пружини АВ, жорсткість якої дорівнює с. Радіуси ступінчастих блоків 1 і 2 дорівнюють відповідно: R1=R, r1=0,4R, R2=R, r2=0,8R. При обчисленні моментів інерції всі блоки вважати однорідними суцільними циліндрами радіуса R. На систему, крім сил ваги, діє пара сил з моментом М1=4РR, яка прикладена до блока 1.

Рис. 21. 32.
Дано: Р1=4Р ; Р2=0; Р3= - ; Р4=5Р ; Р5= - ; F=0; M1=4PR; M2=0; пружина АВ; с.
Визначити:
1)
![]() ,
де x – подовження
пружини; 2) частоту
k і
період τ
коливань.
,
де x – подовження
пружини; 2) частоту
k і
період τ
коливань.
Розв’язання. Система, що вивчається в цій задачі, має два ступені вільності. За узагальнені координати вибираємо кут повороту φ блока 1 і подовження пружини x. Запишемо рівняння Лагранжа другого роду у вигляді
![]() (1)
(1)
![]() (2)
(2)
Визначимо кінетичну енергію Т системи, яка дорівнює сумі кінетичних енергій всіх тіл
![]() (3)
(3)
(Т2=0, Т3=0, Т5=0 – див. “Методичні вказівки”).
Блок 1 обертається навколо осі О1, його кінетична енергія дорівнює
![]() .
(4)
.
(4)
Момент
інерції
![]() дорівнює
дорівнює
![]() .
.
Тоді
![]() .
(5)
.
(5)
Візок здійснює складний рух, тому
![]()
![]()
![]()
Враховуючи протилежні напрями швидкостей, маємо
![]() .
(6)
.
(6)
Кінетична енергія візка 4 дорівнює
 (7)
(7)
![]()
Отже, повна кінетична енергія системи дорівнює
 (8)
(8)
З рівності (8) знаходимо похідні:
![]() (9)
(9)
![]()
![]() (10)
(10)
![]()
![]() (11)
(11)
Обчислюємо узагальнені сили. Нехай x=const (пружина не розтягується), тоді елементарна робота

![]() (12)
(12)
Нехай φ=const (блоки не обертаються), тоді елементарна робота, враховуючи силу пружності пружини Fпр=cx:

![]() (13)
(13)
З рівнянь (9), (10), (11), (12) і (13) складаємо рівняння Лагранжа другого роду:
![]() (14)
(14)
![]() (15)
(15)
Розв’язуємо систему двох рівнянь з двома невідомими:
![]()
З останніх рівнянь знаходимо
![]()
![]() (16)
(16)
Позначимо
![]() (17)
(17)
тоді
![]() (18)
(18)
Рівняння (18) – звичайне неоднорідне лінійне диференціальне рівняння з постійними коефіцієнтами. Загальне розв’язання однорідного диференціального рівняння
![]()
запишемо у формі
![]() (19)
(19)
Частинний розв’язок неоднорідного диференціального рівняння шукаємо у вигляді
![]() (20)
(20)
Знайдемо похідні:
![]()
З рівняння (18) знаходимо
![]()
звідси
![]() (21)
(21)
Загальний розв’язок неоднорідного диференціального рівняння
![]() (22)
(22)
Знайдемо закон зміни швидкості:
![]() (23)
(23)
З
початкових умов
![]()
![]() і рівнянь (22) і (23) знаходимо
і рівнянь (22) і (23) знаходимо
![]() (24)
(24)
![]() (25)
(25)
Отже
![]() (26)
(26)
При відомій циклічній частоті k період коливань дорівнює
![]() (27)
(27)
Відповідь: колова частота коливань
![]()
період коливань
![]()
рівняння руху візка
![]()
Примітка.
Якщо до візка 4
прикладена сила
![]() ,
то елементарна
робота цієї сили дорівнює:
,
то елементарна
робота цієї сили дорівнює:
![]()
Узагальнена сила Q2 (див. формулу (13)) буде визначатись так:
![]()
Приклад розв’язання задачі Д.11. Другий рівень складності.
Механічна
система (рис. 21.33) складається з ступінчастих
блоків 1
і 2,
радіуси яких дорівнюють відповідно
R1=R, r1=0,8R,
R2=R, r2=0,4R,
котка
3
(блоки і коток - однорідні циліндри) і
візка 4
ваги Р4=2Р. Вагою
коліс візка нехтуємо. До котка прикладена
сила
![]() .
Між візком і блоком 2
(ділянка АВ)
поміщена пружина, жорсткість якої
дорівнює с. До
блока 1
прикладена пара сил з моментом M1=4PR.
Система починає рух зі стану спокою;
пружина в цей момент не деформована.
.
Між візком і блоком 2
(ділянка АВ)
поміщена пружина, жорсткість якої
дорівнює с. До
блока 1
прикладена пара сил з моментом M1=4PR.
Система починає рух зі стану спокою;
пружина в цей момент не деформована.
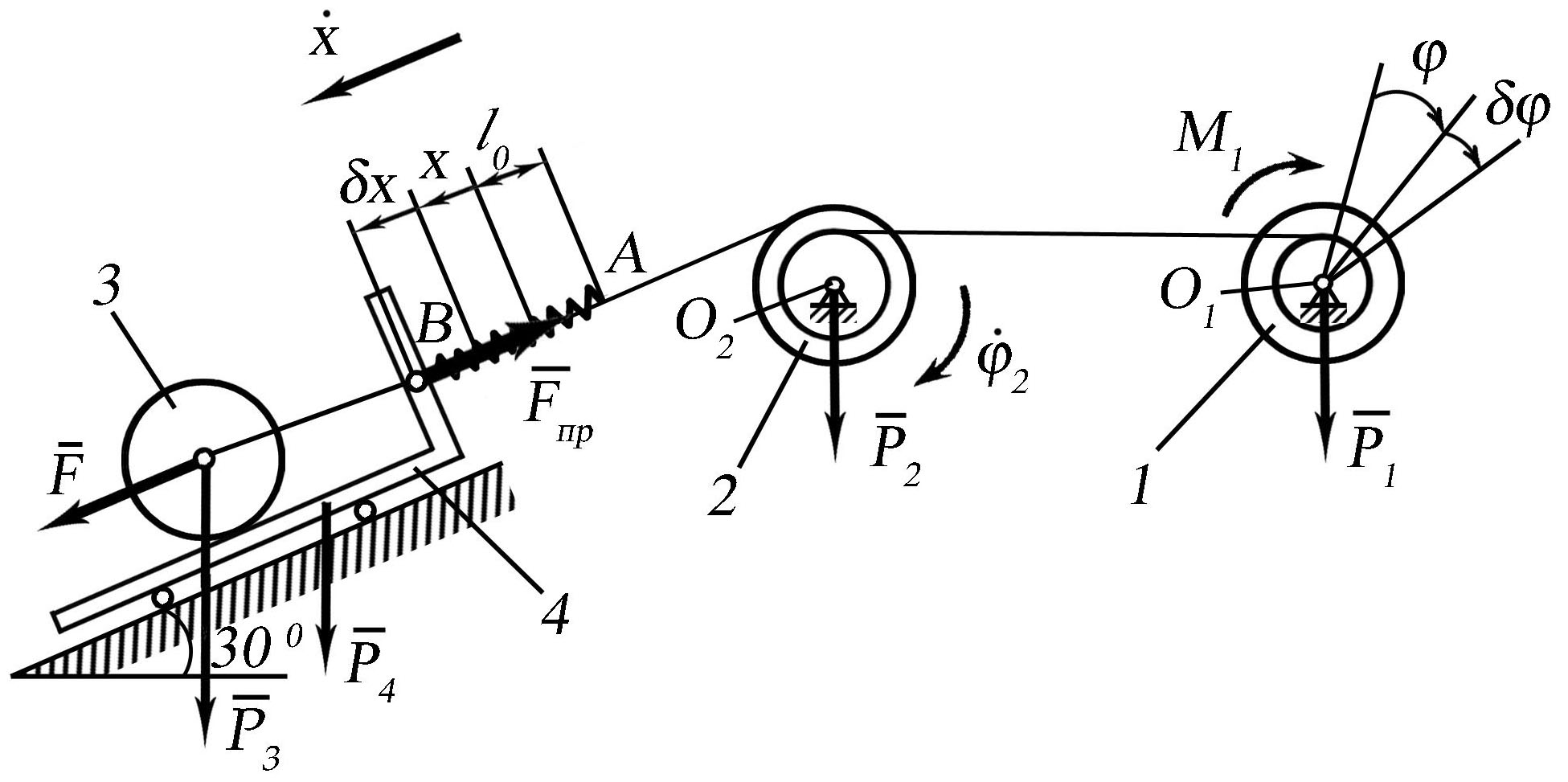
Рис. 21. 33.
Дано: R1=R; r1=0,8R; R2=R; r2=0,4R; Р1=4Р; Р2=2Р; Р3=0,7Р; Р4=2,5Р; F=0; M1=4PR; пружина АВ; с.
Визначити: 1) , де x – подовження пружини (переміщення візка); 2) частоту k і період τ коливань.
Розв’язання. Система, що вивчається в цій задачі, має два ступені вільності. За узагальнені координати приймаємо кут повороту φ блока 1 і подовження x пружини. Запишемо рівняння Лагранжа другого роду у вигляді
![]() (1)
(1)
(2)
Обчислимо кінетичну енергію Т системи, яка дорівнює сумі кінетичних енергій тіл даної системи
![]() .
(3)
.
(3)
Блок 1 здійснює обертальний рух навколо осі О1. Його кінетична енергія Т1 дорівнює
![]() .
.
Момент інерції блока 1
![]() ,
,
а тому
![]() .
(4)
.
(4)
Блок 2 здійснює обертальний рух навколо осі О2. Його кінетична енергія Т2 дорівнює

З рис. 21.33 маємо
![]() ;
;
![]() .
.
Тому
![]() .
(5)
.
(5)
Тіла 3 і 4 здійснюють складний рух (тіло 3 відносно тіла 4 не рухається). А тому
![]()
![]() .
.
Враховуючи напрям швидкостей, маємо
![]() .
(6)
.
(6)
Кінетична енергія візка і котка дорівнює
 (7)
(7)
Повна кінетична енергія системи дорівнює
 (8)
(8)
Від рівності (8) знаходимо похідні:
(9)
![]()
![]() (10)
(10)
![]()
![]() (11)
(11)
Знаходимо узагальнені сили. Нехай x=const, тоді елементарна робота активних сил

Отже
Q1=0,8PR. (12)
Нехай =const, тоді елементарна робота активних сил
![]()
Отже
Q2=1,6P cx. (13)
З рівнянь (10) і (13), (11) і (12) складаємо рівняння Лагранжа другого роду і розв’язуємо систему двох рівнянь:
![]() (14)
(14)
![]() (15)
(15)
![]() ;
;
![]()
![]() ;
;
![]() (16)
(16)
Позначимо
![]() (17)
(17)
Період коливань дорівнює
![]() (18)
(18)
Рівняння (16) перепишемо так:
![]() .
(19)
.
(19)
Однорідне рівняння має загальний розв’язок
![]() .
(20)
.
(20)
Частинний розв’язок запишемо у формі
![]() (21)
(21)
Звідси знайдемо
![]() ;
;
![]() .
(22)
.
(22)
Підставимо вирази (21) і (22) в рівняння (19), одержимо
![]()
звідси
![]() (23)
(23)
Загальний розв’язок неоднорідного диференціального рівняння має вигляд
![]() (24)
(24)
звідси знайдемо похідну за часом:
![]() .
(25)
.
(25)
Початкові умови мають вигляд
![]()
і рівняння (24) і (25) дають такі сталі інтегрування:
![]() ;
;![]() ;
;
![]() ;
;![]() ;
;
![]() .
.
Отже, рівняння (24) перепишемо так:
![]() .
(26)
.
(26)
Відповідь: рівняння руху
![]() ;
;
колова частота коливань
![]() ;
;
період коливань
![]() .
.
Примітка.
Якщо до котка 3
(або візка 4)
буде прикладена сила
![]() (n
–
деяке число), то елементарна робота цієї
сили буде дорівнювати:
(n
–
деяке число), то елементарна робота цієї
сили буде дорівнювати:
![]() .
.
Це призведе до збільшення узагальненої сили Q2 (див. рівняння (13)):
![]() .
.
Приклад розв’язання задачі Д.11. Третій рівень складності.
Механічна система (рис. 21.34) складається з ступінчастих блоків 1 і 2, котка 3, візка 4 і тягаря 5.

Рис. 21.34.
Сили
ваги цих тіл дорівнюють відповідно
![]() Візок з’єднано з блоком 2
намотаною на нього ниткою. Коток з’єднано
з візком 4
пружиною
BD,коефіцієнт
жорсткості якої
Візок з’єднано з блоком 2
намотаною на нього ниткою. Коток з’єднано
з візком 4
пружиною
BD,коефіцієнт
жорсткості якої
![]() .
На коток діє сила
.
На коток діє сила
![]() ,
а на блок 1
– момент М1 і
момент сил опору Мо.
Система
починає рухатись зі стану спокою; пружина
в цей момент не деформована.
,
а на блок 1
– момент М1 і
момент сил опору Мо.
Система
починає рухатись зі стану спокою; пружина
в цей момент не деформована.
Дано: R1=R2=R; r1=0,4R; r2=0,2R; Р1=1,5Р; Р2=2Р; P3=0,5Р; Р4=0,1Р; Р5=4Р; F=Р; М1=2РR; М2=0,1РR; пружина BD; с.
Визначити: 1) , де x – подовження пружини (або переміщення центра D котка відносно візка); 2) частоту k і період τ коливань.
Розв’язання. Дана система має два ступені вільності. За узагальнені координати приймаємо кут повороту φ блока 1 і подовження пружини x (q1=; q2=x). Запишемо рівняння Лагранжа другого роду у вигляді
(1)
(2)
Обчислимо кінетичну енергію Т системи, яка дорівнює сумі кінетичних енергій тіл даної системи
![]() .
(3)
.
(3)
Тіло 1 здійснює обертальний рух. Його кінетична енергія дорівнює
![]()
Тіло 2 також здійснює обертальний рух. Його кінетична енергія
![]()
З рисунка 21.34 знаходимо
;
![]() ,
,
отже
![]()
Тіло 4 здійснює поступальний рух. Його кінетична енергія дорівнює
![]()
Тіло 5 також здійснює поступальний рух. Його кінетична енергія дорівнює
![]()
Тіло 3 здійснює складний рух. Його швидкість дорівнює
![]() ;
;
![]() ;
;
![]()
Враховуючи напрям швидкостей, маємо
![]() .
.
Кутова швидкість тіла 3:
![]() .
.
Кінетична енергія тіла 3 дорівнює

де
![]() .
.
Повна кінетична енергія системи дорівнює
 (4)
(4)
Від виразу (4) знаходимо похідні:
![]() (5)
(5)
![]()
![]() (6)
(6)
![]() ;
;
![]() (7)
(7)
Обчислимо узагальнені сили. При x=const елементарна робота активних сил

Отже
![]() .
(8)
.
(8)
При =const елементарна робота активних сил

Отже
![]() .
(9)
.
(9)
З рівнянь (5), (6) і (8); (5), (7) і (9) складаємо рівняння Лагранжа другого роду і розв’язуємо систему:
![]() ;
(10)
;
(10)
![]() ;
(11)
;
(11)
![]() ;
;
![]()
![]() .
(12)
.
(12)
Останнє рівняння перепишемо так:
![]() (13)
(13)
Позначимо
![]() ;
(14)
;
(14)
![]() .
(15)
.
(15)
Рівняння (13) перепишемо так:
. (16)
Однорідне диференціальне рівняння
![]()
має загальний розв’язок
. (17)
Частинний розв’язок неоднорідного диференціального рівняння запишемо у формі
![]() (18)
(18)
звідси знайдемо похідні:
; . (19)
Підставимо рівності (18) і (19) в (16), одержимо
![]() ,
,
звідси
(20)
Загальний розв’язок неоднорідного диференціального рівняння має вигляд
![]() ;
(21)
;
(21)
звідси знайдемо похідну за часом
![]() (22)
(22)
Початкові умови мають вигляд
![]() ,
,
![]() ,
,
![]()
і рівності (21) і (22) дають такі сталі інтегрування:
;
![]() ;
;
; ; .
Отже, рівність (21) перепишеться так:
. (23)
Відповідь: рівняння коливань
;
циклічна частота коливань
![]() ;
;
період коливань
![]() .
.