

Приклад розв’язання задачі д.9. Третій рівень складності.
Механізм
(рис. 21.28,а),
який
розташований в горизонтальній площині,
складається зі стержнів 1,
2,
3,
4
і повзуна В.
Стержні з’єднані
між собою, з повзуном і з нерухомими
опорами О1
і О2
шарнірами. До повзуна В
прикріплено дві пружини, які з’єднані
послідовно. Коефіцієнт жорсткості
кожної пружини дорівнює с.
На
повзун діє сила
![]() .
До стержня 1
прикладені дві пари сил з моментами
М1
і
М1´,
а
до стержня 4
- дві пари сил з моментами М2
і
М2´.
.
До стержня 1
прикладені дві пари сил з моментами
М1
і
М1´,
а
до стержня 4
- дві пари сил з моментами М2
і
М2´.
Дано: l1=0,6 м; l2=0,8 м; l3=1,5 м; l4=2 м; α=900; β=1500; γ = 1200 ; φ = 00 ; с =250 Н/см; М1=400 Нм; М1´= 5 Нм ;
М2 = 200 Нм; М2´= 10 Нм; Q= 100 Н.
Визначити: деформацію λ пружини при рівновазі механізму.
Розв’язання. 1. Будуємо положення механізму у відповідності з заданими кутами (рис. 21.28,б).
Для розв’язання задачі скористаємось принципом можливих переміщень, згідно якого
∑ δΑ ( )= 0, (1)
де ∑δΑ( ) – сума елементарних робіт активних сил на відповідних можливих переміщеннях.
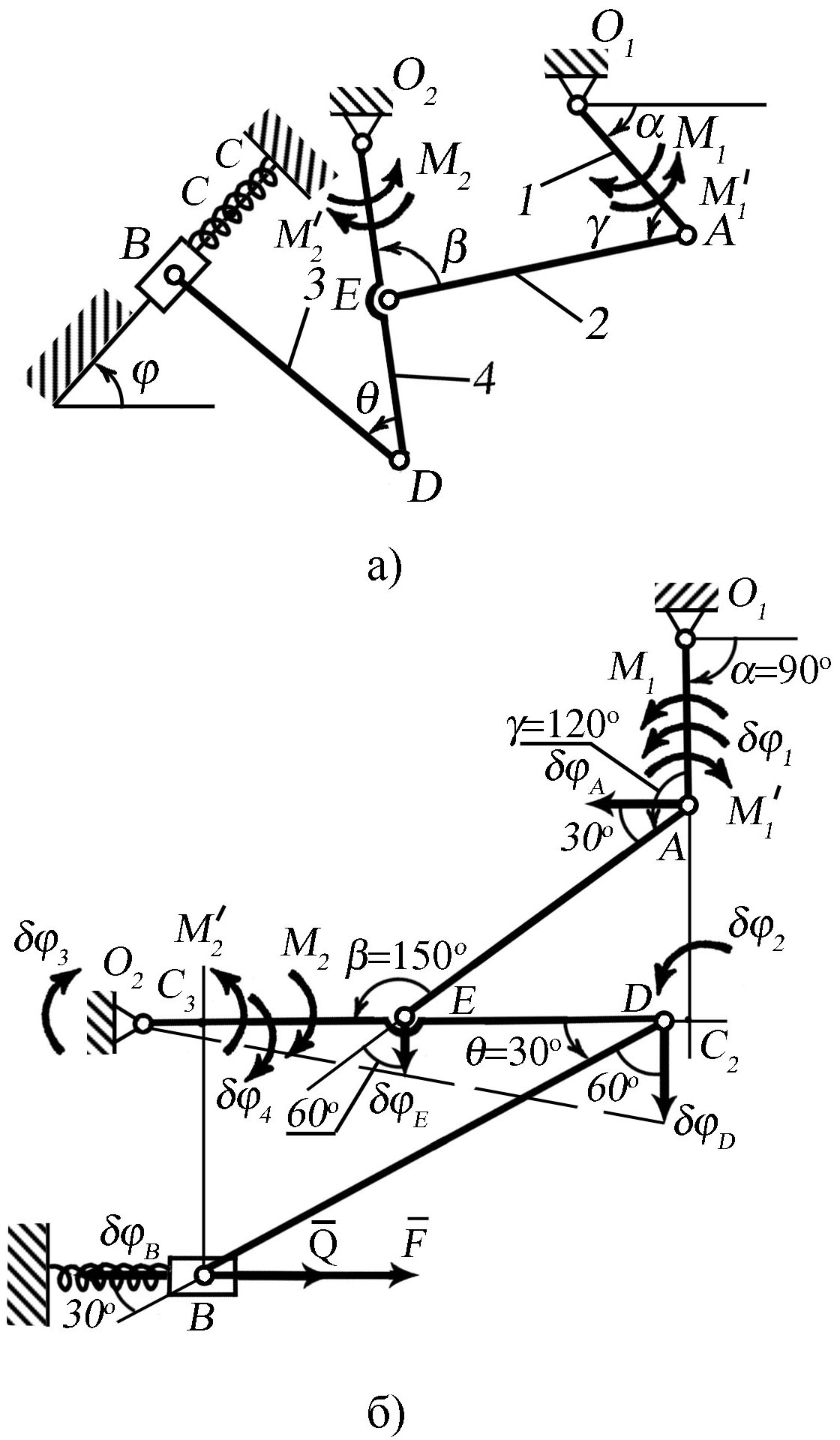
Покажемо активні сили, що діють на механізм: силу , силу пружності пружини ( вважаємо, що пружина стиснута) і пари сил з моментами М1, М1´, М2 і М2´.
Невідому силу знайдемо з рівняння (1), а, знаючи її, з рівності
F = c1λ , (2)
де c1 – коефіцієнт жорсткості еквівалентної пружини, знайдемо деформацію пружини λ.
2. Для складання рівняння (1) надамо механізму можливе переміщення.
Введемо
такі позначення для переміщення ланок,
до яких прикладені сили:
Рис.
21. 28, а,
б.
Система має один ступінь вільності, через це з переміщень δφ1, δφ4 і δSВ незалежним є лише одне можливе переміщення. Приймемо за незалежне можливе переміщення δφ1 - кут повороту стержня 1 - і встановимо, як будуть виражатись переміщення δφ4 і δSВ через δφ1. При цьому необхідно правильно визначити напрям можливих переміщень, для чого необхідно знайти центри миттєвого повороту для кожної ланки (миттєві центри швидкостей). Для ланок 2 і 3 - це точки С2 і С3 .
Залежності між можливими переміщеннями можна знайти з рисунка:
![]()
![]()
![]()
![]()
![]()
![]()
З ∆DС3В знаходимо
![]()
![]()
![]()
![]()
Скористаємось тепер теоремою про рівність проекцій можливих переміщень двох точок плоскої фігури на пряму, що з’єднує ці точки. З рис. 21.28,б маємо
δSА = δφ1 l1 ; (3)
δSА cos300 = δSЕ cos600 ;
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
![]() ;
;
![]() (7)
(7)
З усього видно, що обидва методи дають для можливих переміщень однакові величини.
3. Складаємо рівняння (1). При цьому спочатку необхідно замінити систему двох пружин однією пружиною, коефіцієнт жорсткості с1 якої визначається так:
![]()
![]() Н/см
= 125
Н/см
= 125![]() 102
Н/м.
102
Н/м.
Тоді
![]() (8)
(8)
Замінюємо
можливі переміщення
![]() і
і
![]() їх
значеннями згідно (5) і (7), виносимо
їх
значеннями згідно (5) і (7), виносимо
![]() за
дужки:
за
дужки:
![]() (9)
(9)
Через те, що ≠0, одержимо
![]() ;
(10)
;
(10)
400 – 5 + 2001,04 – 101,04 – 1001,2 F1,2 = 0, (11)
звідси
472 – F 1,2 = 0;
F = 393 H.
Деформація пружини
![]() м
=3,15 см.
м
=3,15 см.
Відповідь: деформація пружини λ = 3,15 см, знак показує, що пружина, як і припускалось, стиснута.