

Структурные схемы кибернетических систем.
Простейшая структура может быть представлена из 2х блоков:
Управляющий и управляемый блоки. В качестве управляющего блока может выступать цифровая система. Такая система наз. сис-й централизованного управления. При централизованном управлении вся информация о состоянии каждого элемента поступает в ЦУП. Это идеальная структура, однако в действительности она ошибочна. Причиной является большое количество информации и необходимого выработки оптимального режима работы. Это сопряжено с большими трудностями. Большое количество времени, что повлечет запаздывание в системе.
Управляемый блок. Отличаются большой жесткостью структуры. В них изменяются как случайные так и связанные с эволюцией системы осуществляющиеся на уровне ЦПУ. При этом надежность значительно падает. Сложные системы строятся по иерархическому принципу. Расчленение такой системы производятся таким образом чтобы каждая часть содержала объекты наиболее тесно связанные др. с др. При этом управляющее устройство высшего ранга управляет крупными подразделами системы, каждая из которых имеет свой ранг, которая управляет более мелкими подразделами, кот-е в свою очередь так же снабжаются управляющими устройствами.
В качестве элементов 1го ранга в технике принято считать дискретный автомат. Модель такого автомата обладает следующими особенностями. На вход поступает ограниченное количество входных величин , а на выходе имеется конечное количество. Такие автоматы получили наз. бес памяти.
Билет №16
Переходная функция, функция веса.
Реакция звена на единичный импульс [δ(t) – дельта - функция] называется импульсной переходной характеристикой (весовой функцией).
Дельта
– функцию [δ(t)]
определяют как импульс, длительность
которого равна 0, амплитуда -
 ,
а площадь 1, т. е. δ(t)
можно определить как производную от
1(t):
,
а площадь 1, т. е. δ(t)
можно определить как производную от
1(t):


Весовую функцию (обозначают ω(t)) также можно найти из передаточной функции звена (системы).

Оригинал весовой функции находится из таблиц преобразования Лапласа:

Прямые методы оценки качества процесса регулирования.
Качество процессов регулирования. Прямые оценки качества определяются по переходной характеристике.
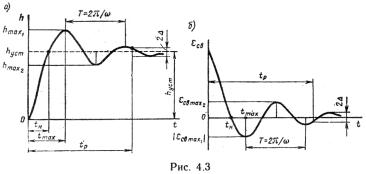
К прямым оценкам относятся:
1) время регулирования (длительность переходного процесса: tp.). Это время от момента приложения внешнего воздействия до момента, когда отклонение регулируемой величины от ее установившегося значения станет меньше чем период заданной величины δ.
Для систем общепромышленного класса принимается δ=0,05h(∞)
2) Перерегулирование – максимальное отношение регулируемой величины в % к установившемуся значению.
 Обычно
рекомендуют 10-30%
Обычно
рекомендуют 10-30%
3) Число колебаний регулируемой величины за время регулирования. n(2..3)
4) Собственная частота колебаний. w0=2π/T
5)
Декремент затухания.
 qi
– амплитуда колебаний.
qi
– амплитуда колебаний.
6) Максимальная скорость изменения регулируемой величины. [dh/dt]max
Косвенные оценки качества позволяют оценить качество системы без построения переходных характеристик.
7) Время достижения первого максимума
Билет №17