

Гидроманипуляторы и лесное технологическое оборудование Бартенев
.pdf
372
k_b – угловая скорость отклонения k-ой точки гибкого рабочего органа в вертикальной плоскости оси, с-1.
Далее представим гибкий рабочий орган, как систему материальных точек, имеющих возможность перемещения относительно друг друга. Так как рассматриваем работу гибкого рабочего органа в трёхмерном пространстве, то координаты, определяющие его положения (рис. 8.43), находим как проекции точек на соответствующие оси:
x |
k |
r |
sin( |
k |
t ) cos( |
к 1 |
t |
к |
t ); |
|
|
||||||||
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
yk rk cos( k |
t ) cos( к 1 |
t к t ); |
(8.47) |
||||||||||||||||
|
|
|
( x |
|
x |
|
|
|
)2 ( y |
|
y |
|
|
)2 sin( |
|
t ). |
|||
z |
k |
k |
k 1 |
k |
k |
1 |
k _ b |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Наложим на эту систему связи, позволяющие вращаться каждой точке относительно друг друга, но не позволяющие изменять длину рабочего органа. Для этого вычислим длину рабочего органа, на основании системы (8.47),
R |
(x |
k |
x |
)2 ( y |
k |
y |
k 1 |
)2 (z |
k |
z |
k 1 |
)2 . |
(8.48) |
k |
|
k 1 |
|
|
|
|
|
|
После чего введём в эту систему коэффициент, позволяющий масштабировать координаты точек, он будет равен отношению постоянной длины гибкого рабочего органа rk к длине получаемой после приращения углов поворота его точек – Rk.
x |
k |
r |
sin( |
k |
t) cos( |
к 1 |
t |
|
к |
t) r |
/ R ; |
|
||||||||
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
k |
k |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(8.49) |
yk rk cos( k t) cos( к 1 t к t) rk |
/ Rk ; |
|||||||||||||||||||
z |
k |
|
(x |
k |
x |
k |
1 |
)2 ( y |
k |
y |
k 1 |
)2 |
sin( |
k _ b |
t) r / R . |
|||||
|
|
|
|
|
|
|
|
|
|
|
k |
k |
||||||||
Данная математическая модель позволяет рассчитать траекторию движения гибкого рабочего органа, если известны угловые скорости входящих в него элементов.
373
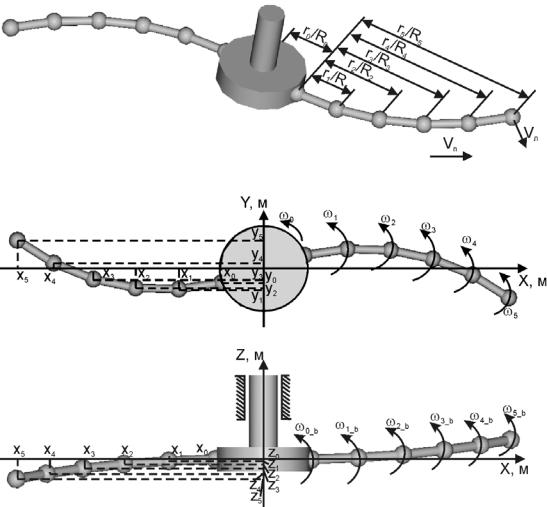
а) Общий вид ротора кустореза с гибкими рабочими органами
б) Проекции материальных точек рабочего органа в плоскости ХОZ
в) Проекции материальных точек рабочего органа в плоскости YOZ
Рис. 8.43. Схема ротора кустореза с гибкими инерционнорубящими рабочими органами
В качестве примера результата расчёта рассмотрим процесс разгона гибкого рабочего органа, который характеризуется изменением координат точки рабочего органа во времени (рис. 8.43).
Этот график построен для материальной точки гибкого рабочего органа, находящейся на расстоянии 0.6 м. от оси ротора, на котором он закреплён.
374
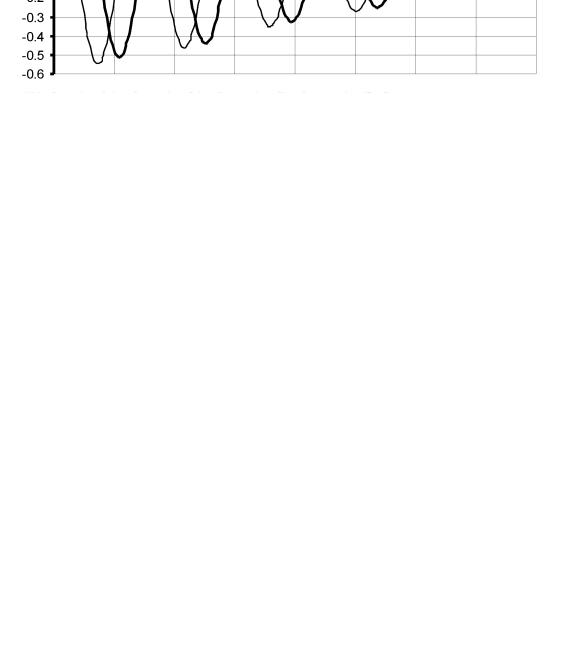
На основании полученных в программе данных можно также построить зависимость, которая характеризует биение рабочего органа в плоскости ХОZ (рис. 8.44).
Рис. 8.44. Изменение координат одной из точек рабочего органа
Рис. 8.45. Зависимость аппликаты точки гибкого рабочего органа от абсциссы точки его крепления на роторе кустореза
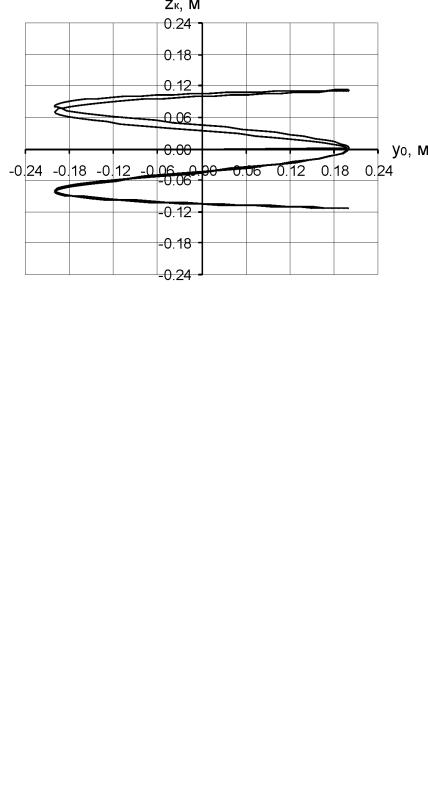
Аналогично будет выглядеть зависимость, которая характеризует биение рабочего органа в плоскости YОZ (рис. 8.46).
375
Рис. 8.46. Зависимость аппликаты точки гибкого рабочего органа от ординаты точки его крепления на роторе кустореза
Изменение координат точки рабочего органа, с помощью которой он закреплён на роторе, показано на рис. 8.47.
Рис. 8.47. Зависимость ординаты точки крепления гибкого рабочего органа на роторе от её абсциссы
376
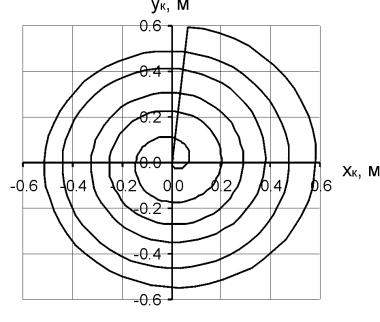
Изменение координат точки рабочего органа, изначально отстоящей от оси вала на расстоянии 0.6 м., показано на рис. 8.48.
Рис. 8.48. Зависимость ординаты точки гибкого рабочего органа от её абсциссы
Из рисунка 8.47 следует, что точка крепления гибкого рабочего органа на роторе вращается с постоянным радиусом 0.2 м, величина которого характеризует расстояние от оси ротора, на котором закреплён гибкий рабочий орган.
Точка, расположенная на гибком рабочем органе и первоначально находящаяся на расстоянии 0.6 м (рис. 8.48), в процессе разгона постепенно приближается к нулевой координате, характеризующей ось ротора. То есть, за счёт сил инерции, угловые скорости материальных точек, составляющих гибкий рабочий орган, будут не одинаковы, и на основании приведённых графиков, можно сделать вывод, что гибкий рабочий орган во время разгона будет стремиться к свёртыванию в центре ротора. В этом случае, если длина гибкого рабочего органа будет больше длины радиуса ротора, то возможно захлёстывание рабочих органов друг за друга.
Во время срезания поросли гибкими инерционно-рубящими рабочими органами, наблюдается аналогичное их свёртывание, как и во время его разгона, но в меньшей степени.
377
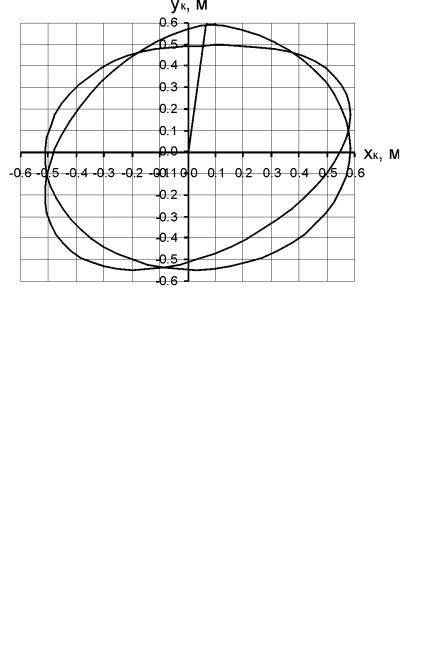
После момента среза поросли происходит уменьшение ширины захвата, из-за снижения скорости рабочего органа, а в дальнейшем ширина захвата восстанавливается за счёт ускорения, которое передаётся гибкому рабочему органу от гидропривода (рис 8.49).
Рис. 8.49. Зависимость ординаты точки гибкого рабочего органа от её абсциссы (рабочий режим)
Рис. 8.50. Зависимость габаритного размера рабочего органа от линейной скорости его движения, при снижении этой скорости в результате удара
для трёх случаев: I – Vл=3 м/с; II – Vл=6 м/с; III – Vл=10 м/с
378
Свёртывание рабочего органа в результате срезания поросли незначительно, при частоте вращения вала ротора более 13,4 с-1 (рис 8.50). В этом случае линейная скорость режущего элемента рабочего органа, отстоящего от оси вала на расстоянии 0,5 м, более 40 м/с.
Динамика гидропривода механизма с гибким рабочим
Для описания работы гибкого инерционно-рубящего рабочего органа применим известное из теоретической механики дифференциальное уравнение вращения твёрдого тела вокруг неподвижной оси:
J пр d |
M дв M c , |
(8.50) |
dt |
|
|
где – угловая скорость вала гидромотора, с-1; Мдв – момент, развиваемый гидромотором, Н м;
Jпр – приведенный момент инерции вращающихся масс к валу гидромотора рассчитываем по формуле Jпр kp Jд Jэл, кг м2;
кр – коэффициент, учитывающий вращающиеся массы редуктора; Jд – момент инерции роторной группы гидромотора, кг м2;
Jэл – момент инерции гибкого рабочего органа, кг м2;
Момент инерции в вертикальной плоскости, представляя режущий эле-
мент как параллелепипед, находим по формуле |
|
|
|||||||||
J |
|
|
|
1 |
m |
|
l2 |
2 |
, |
(8.51) |
|
Z |
12 |
эл |
|||||||||
|
|
|
|
|
|
|
|||||
где l – длина элемента, м;– толщина элемента, м;
mэл – масса элемент гибкого рабочего органа mэл= V, кг;
379
– плотность материала, из которого изготовлен режущий элемент, кг/м3;
V – объём, режущего элемента, м3.
Используя теорему Штейнера, по формуле (8.51) находим момент инерции режущего элемента относительно оси вращения вала
|
|
J эл J Z mэл R2 , |
(8.52) |
||
где R – расстояние от оси вращения элемента до оси вращения вала, м. |
|||||
Момент, развиваемый гидромотором, вычисляется по формуле: |
|||||
|
|
Мдв |
n qм p |
, |
(8.53) |
|
|
|
|||
|
|
|
2 o |
|
|
где n |
– полный КПД гидромотора; |
|
|||
o - объёмный КПД гидромотора; |
|
||||
qм – удельный объём гидромотора, м3/об; |
|
||||
p |
– перепад давлений масла между полостями нагнетания и слива |
||||
гидромотора, то есть |
|
||||
|
|
p p1 p0 , |
(8.54) |
||
где |
р1 |
– давление масла в полости нагнетания гидромотора, МПа; |
|||
|
ро |
– давление масла в полости слива гидромотора, МПа. |
|||
Значения давлений масла можно определить из уравнения постоянства |
|||||
расхода масла, подаваемого в гидромотор от насоса |
р1 и ро , выходящего из |
||||
гидромотора на слив. |
|
||||
Момент нагрузки на валу гидромотора, создаваемый силами сопротивле- |
|||||
ния резанию, для инерционно-рубящего органа равен: |
|
||||
|
|
M c уд Jэл , |
(8.55) |
||
где уд – угловое ускорение удара, с-2. |
|
||||
380
Из теории импульсного резания известно, что усилие импульсного резания можно выразить из усилия «силового» резания Fл, введя поправочный со-
вокупный коэффициент динамичности по усилию резания КДР, |
|
|||
|
|
FДИН FЛ КДР . |
(8.56) |
|
А из теоретической механики известно, что импульс силы выражается |
||||
формулой |
|
|
|
|
FДИН |
|
mЭЛ R ( до. уд п. уд ) |
, |
(8.57) |
|
||||
|
|
t уд |
|
|
где до.уд. – угловая скорость рабочего органа до удара, с-1;п.уд. – угловая скорость рабочего органа после удара, с-1; tуд – момент времени в течении которого произошёл удар, с.
Тогда ускорение, получаемое режущим элементом в результате взаимодействия с порослью, вычисляем по формуле
уд |
п. уд до. уд |
|
FДИН |
. |
(8.58) |
|
|
||||
|
t уд |
m R |
|
||
Подставим это ускорение в формулу (8.55), получим искомый момент, создаваемый на валу от сил резания
Мс |
FДИН |
J эл . |
(8.59) |
|
m R |
||||
|
|
|
Подставив найденные выражения Мдв и Мс в исходное уравнение (8.50), получим дифференциальное уравнение движения гибкого рабочего органа с приводом от гидромотора
J |
d |
|
|
q |
|
p |
|
FДИН |
J |
|
. |
(8.60) |
|
пр dt |
n |
|
м |
|
|
эл |
|||||||
2 o |
m R |
||||||||||||
|
|
|
|
|
|
||||||||
Для возможности более полного исследования динамических процессов в рассматриваемом гидроприводе уравнение (8.60) должно быть дополнено вторым дифференциальным уравнением, которое будет описывать расход рабочей жидкости. Это уравнение имеет вид :