

Гидроманипуляторы и лесное технологическое оборудование Бартенев
.pdf181
лы и колонны, общее время цикла работы гидроманипулятора заметно меньше при совместном движении.
Врезультатетеоретическихисследованийустановленоследующее(рис. 4.18):
-при совмещении движений поворотной колонны и подъема стрелы время цикла сокращается на 15 20%;
-максимальное значение усилия гидроцилиндра поворота в переходном режиме уменьшается в 1,8 раза;
-усилие гидроцилиндра подъема стрелы при совмещении движений сни-
жается в 1,1 1,2 раза.
Значительные пики усилий в переходных режимах объясняются тем, что при решении задачи не учитывается податливость рабочей жидкости, наличие дросселей в полостях гидроцилиндра поворота и предохрантельных устройств в напорной и сливной магистралях.
Для более точного решения задачи систему дифференциальных уравнений совместного движения колонны и стрелы и расхода рабочей жидкости, подводимой к гидроцилиндрам подъема стрелы и вращения колонны, запишем в виде:
Q |
|
|
|
|
|
dп22d |
d 2 |
a |
|
|
|
P K |
|
|
dP2 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
2 |
|
|
|
8 |
|
|
dt |
|
|
|
y 2 |
2 |
|
|
|
P2 |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
d 2 |
d d |
|
|
|
|
|
|
|
|
|
|
|
|
|
dP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Q |
|
|
|
|
|
|
a |
P K |
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
п2 |
|
|
|
|
2 |
P3 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
3 |
|
|
|
8 |
|
|
dt |
|
|
|
|
y |
3 |
3 |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
d 2 d d |
|
|
|
|
|
|
|
|
|
|
|
|
dP |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Q |
|
|
|
п1 |
|
|
|
1 |
a |
y1 |
P K |
P1 |
|
|
1 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
1 |
|
|
|
|
8 |
|
|
dt |
|
|
|
|
|
|
1 |
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
1 J |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
J |
|
|
ml 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
1 |
|
1 |
sin( |
|
) |
2 |
ml 2 cos( |
|
)sin( |
|
) |
2 |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
1 |
|
2 |
|
|
(4.88) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
dп21 Pb sin K |
Н1 |
g( ml |
m |
l |
c |
)cos( |
); |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
4 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
( J |
|
cos( |
|
) |
J |
|
|
) |
|
|
ml 2 cos2 ( |
|
) |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
1 |
|
2 |
|
2 |
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dп22 |
|
|
|
|
|
|
|
[ J |
1 |
2ml 2 cos( |
|
|
)] sin( |
) |
|
2 |
|
( Р |
Р )d M |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
8 |
2 |
|
3 |
|
|
c |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|

182
где Q1 – подача рабочей жидкости в поршневую полость гидроцилиндра подъема стрелы в единицу времени, м3/с;
Q2 – объем рабочей жидкости, подаваемой в напорную полость гидроци-
линдра поворота в единицу времени, м3/с;
Q3 – объем рабочей жидкости, вытесняемый из сливной полости гидро-
цилиндра поворота в единицу времени, м3/с;
КН1 – коэффициент нарастания нагрузки;
Р1,Р2,Р3 – давление в поршневой полости гидроцилиндра подъема стрелы,
напорной и сливной полостях гидроцилиндра поворота соответственно, Па;
аy1, ay2, ay3 – коэффициенты утечек в магистрали гидроцилиндра подъема стрелы, напорной и сливной магистралях гидроцилиндра поворота соответст-
венно, м3/Па с;
Кр1, Кр2, Кр3 – коэффициент податливости рабочей жидкости в магистра-
лях гидроцилиндра подъема стрелы, напорной и сливной магистралях гидроци-
линдра поворота соответственно, м3/Па;
dп1, dп2 – диаметр поршня гидроцилиндра подъема стрелы и поворота ко-
лонны соответственно, м.
Q |
dО2 |
|
2( Р |
м |
Р ) |
; |
|
|
(4.89) |
||||
|
1 |
|
|
2 |
|
|
|
||||||
|
4 |
|
|
|
|
|
|||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
||
Q |
|
dО2 |
|
2( Р Р |
|
) |
. |
(4.90) |
|||||
|
|
2 |
|
|
3 |
С |
|
|
|||||
|
|
|
|
|
|
|
|||||||
3 |
|
4 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
где dO1, dO2 – диаметры отверстий дросселей в напорной и сливной маги-
стралях, м;
183
Рм – давление в магистрали напорной полости гидроцилиндра поворота,
Па;
Рс – давление подпора на сливе, Па.
Рабочая жидкость, подаваемая насосом
Kt QН Q1 Q2 QK2 ,
где QК2 – расход рабочей жидкости через предохранительный клапан, ус-
тановленный в напорной магистрали гидроцилиндра поворота, м3/с;
Кt – коэффициент, учитывающий изменения подачи рабочей жидкости.
|
|
( d 2 l |
Ц1 |
d 2l |
|
|
) |
|
|
|
|
||||||
KP1 |
|
п1 |
|
|
|
p |
|
P1 |
; |
|
|
(4.91) |
|||||
|
|
4Eж |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
( d 2 |
l |
Ц |
2 |
d |
2l |
P2 |
) |
|
|
|||||
KP2 |
|
|
п2 |
|
|
|
|
p |
|
|
|
; |
(4.92) |
||||
|
|
|
|
4Eж |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
( d 2 |
l |
Ц |
3 |
d 2l |
P3 |
) |
|
|
|
|||||
KP3 |
|
|
п2 |
|
|
|
p |
|
|
. |
(4.93) |
||||||
|
|
|
4Eж |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где lЦ1, lЦ2, lЦ3, – текущее расстояние от поршня до крышки гидроцилинд-
ра подъема стрелы, напорной и сливной полостей гидроцилиндра поворота со-
ответственно, м;
lР1 , lР2 , l р3 – длина трубопроводов магистралей гидроцилиндров, м; dp – внутренний диаметр трубопроводов, м.
В переходных режимах принимаем Еа=1,5 Е.
Решение системы (4.87) даст более точные зависимости P1=f(t), P2=f(t), P3=f(t), как при раздельном движении звеньев, так и при совмещении движений
(рис. 4.19).

184
Рис. 4.19. Расчетные зависимости для манипулятора ЛВ-185-07 при совместном движении и номинальной подаче Qн=1,33 10-3 м3/c на каждый контур:
а) давление в поршневой полости ГЦ подъема стрелы; б) давления в напорной полости ГЦ поворота колонны при отсутствии дросселя, ограничивающего подачу;
c) давление в сливной полости ГЦ поворота колонны при отсутствии дросселя, ограничивающего слив
Сравнивая результаты расчетов с результатами расчетов по системе (4.67), можно оценить влияние податливости рабочей жидкости и утечек на динамическую нагруженность механизмов при совмещении движений.
185
4.4. Упрощенный динамический расчет манипулятора
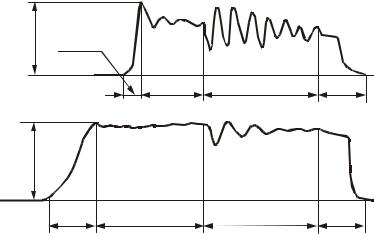
Многочисленные натурные тензометрические испытания манипуляторов различной грузоподъемности показывают [68], что динамические нагрузки механизма подъема стрелы в пуско-тормозных режимах зависят от характеристик аппаратов управления гидросистемой (рис. 4.20), утечек в гидросистеме; податливости рабочей жидкости, элементов гидропривода, звеньев манипулятора, а также основания, на котором установлен манипулятор.
=25МПа |
Начало |
Остановка |
|
|
max |
подъема |
|
|
|
|
|
|
||
Р |
Нулевая |
|
Опуска- |
|
|
Подъем |
Успокоение |
||
|
линия |
ние |
||
|
|
|
|
|
|
|
а) |
|
=20МПа |
|
|
Остановка |
|
max |
|
|
|
|
Р |
|
|
|
|
Нулевая |
Начало |
Подъем |
Успокоение |
Опуска- |
линия |
подъема |
ние |
||
|
|
|
б) |
|
Рис. 4.20. Изменение давления в поршневой полости ГЦ подъема стрелы при работе с распределителем Р 20П (а) и F-130CF (б)
Экспериментальными исследованиями установлено, что для упрощенных динамических расчетов можно сделать следующие допущения:
-давление в гидроцилиндре подъема стрелы до момента отделения груза от основания возрастает по линейному закону (рис. 4.21 а);
-скорость движения штока при установившемся режиме работы гидропривода является постоянной;
-колебания давления высокой частоты (вибрации) не оказывают существенного влияния (ввиду кратковременности воздействия) на ресурс гидроцилиндра и циклическую трещиностойкость металлоконструкции

186
манипулятора и, следовательно, для упрощенных расчетов можно принять, что после отделения груза от основания он совместно с конструкцией совершает колебания (рис. 4.21 б).
Р, МПа |
|
у/уст |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tс |
а) |
t, с |
б) |
t, с |
Рис. 4.21. Изменение давления в ГЦ подъема стрелы (а) и колебания системы после отделения груза от основания (б)
Подобные соотношения установлены тензометрическими испытаниями кранов различной грузоподъемности. Для грузоподъемных кранов коэффициент динамичности при подъеме груза равен [48]:
1 |
|
V |
mM mГ |
, |
(4.94) |
|
y |
|
|||||
|
с |
|
|
|||
|
cm |
cm |
M |
|
|
где V – скорость груза в момент отделения от основания, м/с;
yст – статический прогиб конструкции крана в точке приложения номинальной нагрузки, м;
ст – статическое удлинение каната, м;
mM – приведенная масса металлоконструкции, кг; mГ – масса груза, кг;
сМ – приведенная жесткость конструкции крана.
сМ m g . |
(4.95) |
ycт
Для гидроманипулятора с жесткой и шарнирной подвеской грузозахватного органа ст =0.

187
Проекция скорости груза на вертикальную ось, равная скорости отделения груза от основания
V |
l |
sin( )VШ , |
(4.96) |
|
|||
|
b |
|
|
где VШ – скорость движения штока гидроцилиндра, м/с; l = ОС – длина стреловой группы, м.
Если пренебречь утечками рабочей жидкости и потерями, скорость движения штока во время переходного процесса будет равна
VШ |
QН |
|
t |
|
4QН |
|
t |
, |
|||||
f |
Ш |
|
t |
n |
|
d |
2 |
|
t |
n |
|||
|
|
|
|
|
|
|
|
|
|
||||
где QН – номинальная производительность насоса, м3/с; d – диаметр поршня гидроцилиндра подъема стрелы, м; tn – время переходного процесса, с.
 Vш
Vш
О |
|
|
|
|
|
А |
|
с |
|
b |
|
|||
|
С |
|||
|
|
|
||
|
а |
|
|
|
|
|
|
mгg |
|
|
В |
|
|
Рис. 4.22. Кинематическая схема механизма подъема стрелы
Рассмотрим момент, когда t tn и VШ VШmax .
Натурными испытаниями гидроманипуляторов установлено, что под действием номинального груза статический прогиб yст 0,42м (для ЛВ-184А) и yст 0,22 м (для ЛВ-185).
Соответственно приведенная жесткость конструкции манипулятора (с учетом податливости жидкости, элементов гидропривода и звеньев) равна

188
сМ 860 9,81 20,1 103 Н/м (для ЛВ-184А);
0,42
сМ 1030 9,81 45,9 103 Н/м. (для ЛВ-185).
0,22
Из выражения (4.96) следует, что скорость отделения груза от основания зависит от параметров манипулятора b и l, угла подъема стрелы при отрыве груза от основания, а также скорости движения штока гидроцилиндра.
Максимальному значению скорости соответствует значение
т.е.
Vmax bl VШ .
С учетом (4.94), окончательно будет:
1 |
1 |
lVШ |
|
mМ mГ |
. |
(4.98) |
bycт |
|
|||||
|
|
|
сМ |
|
||
Приведем массу конструкции манипулятора к точке подвеса груза (точке С). Кинетическая энергия системы стрела-рукоять с удлинителем при вращении вокруг оси проходящей через точку О равна (рис. 4.23)
О |
|
Д |
С |
||||
|
|
|
|
||||
|
А mcg |
|
mцg |
|
|
m g |
|
|
|
|
|
|
|||
|
|
|
|
|
|||
|
lц |
|
|
|
|
р |
|
|
|
|
|
|
|
mгg |
|
|
|
|
|
|
|
|
|
|
lc |
|
lр |
|
|||
|
|
|
|
||||
|
|
|
|
lд |
|
|
|
|
В |
|
|
|
|
||
|
l |
|
|||||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Рис. 4.23. Схема приведения массы стрелы и рукояти к точке подвеса груза
T |
J 2 |
|
J po 2 |
|
mцVц2 |
, |
(4.99) |
|
c |
|
|
||||||
2 |
2 |
2 |
||||||
|
|
|
|
|

189
где – Jc – момент инерции стрелы относительно оси, проходящей через точку О, кг м2;
Jро – момент инерции рукояти с удлинителем и гидроцилиндром удлини-
теля относительно оси, проходящей через точку О, кг м2;
– угловая скорость поворота стреловой группы, с-1;
mц – масса гидроцилиндра привода рукояти с механизмом складывания, кг;
Vц – скорость центра масс гидроцилиндра привода рукояти с механизмом складывания, м/с.
Рассматривая стрелу и рукоять с удлинителем, как однородные стержни имеем
Jc mc |
l2 |
; J ро mр |
|
lp2 |
mplД2 . |
|
c |
|
|
||||
12 |
||||||
|
3 |
|
|
|||
Учитывая, что
Vlc и VЦ Vlc lЦ ,
получим
|
V 2 |
m l2 |
|
mрlp2 |
|
2mplД2 |
|
mцlц2 |
|
|||||
T |
c |
|
c c |
|
|
|
|
|
|
|
|
|
. |
|
|
2 |
|
2 |
|
2 |
|||||||||
|
2 |
|
3l |
2 |
|
6l |
|
l |
|
l |
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
Следовательно, масса стрелы, рукояти с удлинителем и гидроцилиндром,
приведенная к точке подвеса груза
|
2m l2 |
m |
p |
(l2 |
12l2 |
) 6m l2 |
|
|
mM |
c c |
|
p |
Д |
ц ц |
. |
(4.100) |
|
|
|
|
6l2 |
|
||||
|
|
|
|
|
|
|
||
Исходные данные для упрощенного расчета коэффициента динамичности и результаты расчетов для манипуляторов различной грузоподъемности приве-
дены в таблице 4.2.

190
|
|
|
|
|
|
|
Таблица4.2 |
||
|
|
|
Исходныеданныеирезультатырасчетакоэффициентадинамичности |
||||||
|
|
|
Значения параметров для манипуляторов |
|
|
||||
Параметр |
Ед. изм. |
|
|||||||
|
|
|
ЛВ-184А |
ЛВ-184Б |
ЛВ-185 |
ЛВ-215 |
|
|
|
|
mГ |
кг |
884 |
1250 |
1047 |
1257 |
|
|
|
|
mc |
кг |
311 |
340 |
520 |
520 |
|
|
|
|
Jc |
кг м2 |
1153 |
1170 |
3198 |
3198 |
|
|
|
|
lc |
м |
3,335 |
3,335 |
4,295 |
4,295 |
|
|
|
|
mp |
кг |
122 |
122 |
190 |
190 |
|
|
|
|
lp |
м |
2,818 |
2,818 |
3,110 |
3,110 |
|
|
|
|
lД |
м |
4,723 |
4,785 |
5,445 |
5,445 |
|
|
|
|
mц |
кг |
49 |
83 |
100 |
100 |
|
|
|
|
lц |
м |
2,070 |
2,030 |
3,1 |
3,1 |
|
|
|
|
l |
м |
6,153 |
6,153 |
7,405 |
7,405 |
|
|
|
|
lmc |
м |
3,00 |
3,1 |
3,92 |
3,92 |
|
|
|
|
mmc |
кг |
31,3 |
57 |
42 |
42 |
|
|
|
|
b |
м |
0,447 |
0,605 0,447 |
0,46 |
0,46 |
|
|
|
|
ycm |
м |
0,42 |
0,61 |
0,22 |
0,27 |
|
|
|
|
cM |
Н/м |
20,1 103 |
20,1 103 |
45,9 103 |
45,9 103 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
VШ= |
0,05м/с |
1,38 |
1,22 |
1,63 |
1,55 |
|
|
|
0,10м/с |
1,75 |
1,44 |
2,25 |
2,10 |
|
|
||
|
|
|
0,15м/с |
2,14 |
1,67 |
2,88 |
2,85 |
|
|
2 |
|
VШ= |
0,05м/с |
1,76 |
1,45 |
2,25 |
2,10 |
|
|
|
0,10м/с |
2,51 |
1,89 |
3,51 |
3,20 |
|
|
||
|
|
|
0,15м/с |
3,27 |
2,35 |
4,75 |
4,30 |
|
|
Расчет по упрощенной формуле (4.98) дает заниженное значение коэффициента динамичности. Расчет по другой [48] упрощенной формуле
1 |
2V |
mM mГ |
(4.101) |
||
y |
|
с |
М |
||
|
cт |
ст |
|
|
|
дает завышенное значение коэффициента динамичности. Для гидроманипуляторов с жесткой шарнирной подвеской грузозахватного органа формула (4.101) примет вид:
1 |
2lVШ |
mM mГ . |
(4.102) |
|
by |
с |
|
|
cт |
М |
|
По данным точного метода расчета, хорошо согласующегося с экспериментом, значение коэффициента динамичности находится между значениями, вычисленными по упрощенным формулам (4.98) и (4.102).