

Гидроманипуляторы и лесное технологическое оборудование Бартенев
.pdf131
где Pш – давление в магистрали подвода рабочей жидкости, Па. Коэффициенты податливости определяем с учетом объема деформируе-
мой жидкости по формулам:
KP |
d 2l |
|
; |
|
|
|
|
n 1 |
|
|
|
|
|||
4Еж |
|
|
|
|
|||
|
1 |
|
|
|
|
|
|
KP |
(d 2 d |
2 |
)l |
2 |
, |
||
|
n |
Ш |
|
||||
|
|
|
|
|
|||
2 |
|
4Еж |
|
|
|
|
|
|
|
|
|
|
|
|
|
где l1, l2 – расстояние отпоршнядоверхнейинижнейкрышкисоответственно, м. В переходных режимах принимаем Еа=1,5Е.
Систему дифференциальных уравнений (3.46) решаем методом Эйлера.
Результаты решения представлены на рисунках 3.28 … 3.31.
Рп, МПа
Рш, МПа
t, c |
t, c |
а) |
б) |
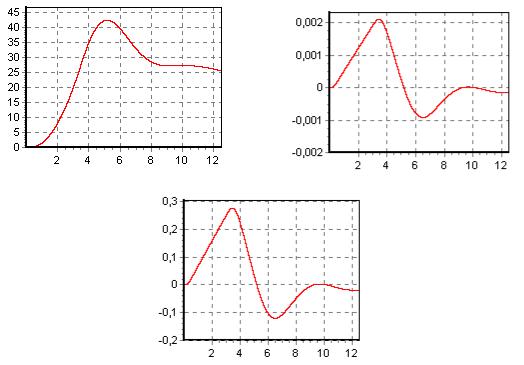
Рис. 3.28. Расчетные зависимости: |
|
а) давления в поршневой полости; б) давления в штоковой полости
При подаче рабочей жидкости в поршневую полость давление в ней возрастает до 19 МПа и, по мере разгона, в течение 3 с несколько снижается. При прекращении подачи и слива рабочей жидкости давление снижается до нуля, а
затем начинает постепенно повышаться (рис. 3.28а). Снижение давления рабо-
чей жидкости в поршневой полости и последующее его повышение объясняется тем, что после прекращения подачи и слива рабочей жидкости (торможения)
пачка сортимента, продолжая вращаться по инерции, сжимает рабочую жид-
кость в штоковой полости (рис. 3.28б), а затем под действием возрастающего давления рабочей жидкости в штоковой полости возвращается в положение, соответствующее началу торможения. При этом давление в поршневой полости

132
повышается до 14 МПа (рис. 3.28а), а давление в штоковой полости снижается
(рис. 3.28б).
, град
Рш, МПа
Vn, м/с
t, c |
t, c |
а) |
б) |
|
|
, 1/град |
|
t, c
в)
Рис. 3.29. Расчетные зависимости:
а) угла поворота; б) скорости поршня; в) угловой скорости
Рп, МПа
t, c |
t, c |
а) |
б) |
Рис. 3.30. Расчетные зависимости:
а) давления в штоковой полости; б) давления в поршневой полости
133
, град |
Vn, м/с |
t, c |
t, c |
а) |
б) |
, 1/град
t, c
в)
Рис. 3.31. Расчетные зависимости:
а) угла поворота; б) скорости поршня; в) угловой скорости
Процессы разгона, торможения и возвращения в положение, соответст-
вующее началу торможения пачки сортимента, представлены на рис. 3.29а. Характер изменения скорости поршня и угловой скорости вала ротатора (рис.
3.29 б, в) также свидетельствуют о возвращении вращающегося груза в исходное состояние. Изменения скорости перемещения поршня и угловой скорости его вращения, за исключением переходных режимов, имеют линейный характер
(рис. 3.29 б, в).
Примечательным является то, что, в отличие от ротаторов других типов
(полноповоротных и неполноповоротных), винтовой ротатор имеет высокую
точность позиционирования. Если перебег (угол вращения пачки сортимента от
начала прекращения подачи и слива рабочей жидкости до полной ее остановки) в лопастных ротаторах (полноповоротных и неполноповоротных) составляет
134
180-2000, то винтовой ротатор после перебега в 5-100 возвращается в положение, соответствующее началу торможения. Объясняется это тем, что новый винтовой ротатор практически не имеет перетечек. При износе уплотнений
поршня в процессе эксплуатации точность позиционирования может снизиться,
но будет всегда выше, чем у ротаторов других типов.
Аналогичные зависимости получены при подаче рабочей жидкости, в штоковую (винтовую) полость ротатора (рис. 3.30 а, б; 3.31 а, в).
Итак, система уравнений (3.46) является наиболее точной математической моделью винтового ротатора. Однако, можно определить зависимость расчетных значений давлений в поршневой и штоковой полостях при установившемся режиме от диаметров отверстий дросселей и требуемого момента поворота.
Расход рабочей жидкости через поршневую полость ротатора
Q1 |
|
dn2 |
Vn , |
(3.49) |
|
4 |
|||||
|
|
|
|
где Vn – скорость поступательного движения поршня ротатора, м/с. Расход рабочей жидкости через штоковую (винтовую) полость ротатора
Q2 |
|
(dn2 |
dш2 ) |
Vn . |
|
(3.50) |
||||
|
|
|
|
|||||||
|
|
|
4 |
|
|
|
|
|
||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
d 2 |
. |
|
|
|
|
1 |
|
|
n |
|
|
||||
|
|
d 2 |
d 2 |
|
|
|||||
|
|
Q |
|
|
|
|
|
|||
|
2 |
|
|
n |
|
ш |
|
|
|
|
С учетом (3.47) и (3.48) получим |
|
|
|
|
|
|
|
|
||
dO4 |
P1 (dn2 |
dш2 )2 dO4 |
P2 dn4 . |
(3.51) |
||||||
1 |
|
|
|
|
|
|
|
2 |
|
|
Пренебрегая потерями на трение, составим уравнение равновесия поршня
при подаче рабочей жидкости в поршневую полость:
Р |
d 2 |
Pш |
(d 2 |
d 2 ) |
R mg . |
(3.52) |
n |
n |
n |
ш |
|||
|
4 |
|
4 |
|||
|
|
|
|
|
Значения осевого усилия, необходимого для обеспечения момента поворота Мр, определим из (2.72)

|
|
R |
|
|
|
2M p |
|
. |
|
|
|
d2 cos2 (tg f1 ) |
|||||||
Из (3.52) |
с учетом (3.53) |
|
|
|
|
|
|
|
|
|
|
Рn Pш |
(dn2 dш2 ) |
4(R mg) . |
|||||
|
|
|
|||||||
|
|
|
|
|
|
|
dn2 |
dn2 |
|
Из (3.51) |
с учетом (3.54) получим |
|
|
|
|||||
|
|
(d 2 |
d 2 ) |
|
|
4(R mg) |
|||
|
dO41 Pn Pш |
n |
ш |
|
2 |
(dn2 dш2 )2 PшdO42 dn4 . |
|||
|
|
2 |
|||||||
|
|
|
dn |
|
|
dn |
|
||
135
(3.53)
(3.54)
(3.55)
Отсюда находим
|
Pn (dn2 dш2 )2 |
|
4(R mg)(d 2 |
d 2 )2 |
|
|
|
||||||||
|
|
|
|
|
|
|
n |
ш |
|
|
|
||||
Pш |
|
|
|
dn2 |
|
|
|
. |
(3.56) |
||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
d 2 )3 |
|
dO |
4 |
|
||||||||||
|
|
(d 2 |
|
|
|
|
|||||||||
|
|
n |
|
ш |
|
d 4 |
|
|
2 |
|
|
|
|
|
|
|
|
|
d 2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
n |
d |
O1 |
|
|
|
|
|
|||
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
||
Обозначим dO2 k1 .
dO1
Из (3.56) определяем зависимость Рш=f(k1), а из (3.54) – зависимость
Рn=f(k1).
При подаче рабочей жидкости в штоковую полость, получим аналогичные зависимости
|
dO4 (Pш Рш )dn4 |
|
dO4 |
Pn (dn2 d |
ш2 )2 . |
(3.57) |
|||||||||||||
|
2 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
Из условия равновесия поршня |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
Рn |
Pш |
(d 2 |
d |
2 ) |
|
4(R mg) |
. |
|
|
(3.58) |
||||||||
|
|
n |
ш |
|
|
|
1 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
dn2 |
|
|
|
|
|
dn2 |
|
|
|
|
|
|
|
Тогда, обозначив k2 |
dO |
, имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
dO |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
4 |
4(R |
mg)(d 2 |
|
d 2 )2 |
|
||||||||||
|
|
|
|
1 |
|
n |
|
|
ш |
|
|||||||||
|
|
|
dn |
Pш |
k2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pш |
|
|
|
|
|
|
dn2 |
|
|
|
|
. |
(3.59) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
dn4 k24 |
|
(d 2 |
d 2 )3 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
n |
ш |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
dn2 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
136
Обычно Pn Pш |
и тогда |
R1 |
d 2 |
d 2 |
|||||||||||
|
|
n |
2 |
ш R . |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dn |
|
Учитывая, что k2 |
|
1 |
, получим |
|
|
|
|||||||||
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
dn4 Pш |
|
4(R mg)(d 2 |
d 2 )2 |
|
|
|
||||||||
|
|
|
|
1 |
|
|
n |
ш |
|
|
|
|
|
||
Pш |
|
|
|
|
k14 dn2 |
|
|
|
. |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
dn4 |
|
|
(d 2 d 2 )3 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
n |
|
ш |
|
|
|
|
|
|
||
|
|
|
|
k14 |
dn2 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Если значение Рп по формуле (3.58) меньше нуля, то необходимо увеличить Рш, т.е. давление настройки предохранительного клапана в штоковой полости.
Из (5.58) и (5.59) определяем зависимости Pш f (k1 ) и Pn f (k2 ) .
Используя полученные зависимости, можно получить оптимальные соотношения диаметров дроссельных отверстий.
3.7.Выводы
1.Податливость рабочей жидкости и элементов гидропривода механизмов
подъема стрелы, привода рукояти и поворота колонны необходимо учитывать в
переходных режимах при определении коэффициента динамичности.
2.Величина пиковых значений давлений в переходных режимах зависит от характера изменения подачи рабочей жидкости, коэффициента податливости рабочей жидкости, работы предохранительных устройств, наличия дроссель-
ных устройств.
3.После завершения переходного процесса, скорости движения штоков не
изменяются, что подтверждает корректность принятого в главе 2 допущения о постоянстве скорости движения штоков при установившемся режиме работы
гидропривода.
4.Оптимальные значения параметров механизмов подъема стрелы и при-
137
вода рукояти можно определить без учета податливости рабочей жидкости, элементов гидропривода, так как скорости движения штоков гидроцилиндров после завершения переходного процесса являются постоянными, что соответ-
ствует принятому допущению при определении оптимальных значений.
5.Наибольшие динамические нагрузки возникают при торможении опускающегося груза.
6.Подпор давления в поршневой полости ГЦ при опускании стрелы зависит от соотношения диаметров отверстий дросселей, установленных в поршневой и штоковой полостях. При установке в поршневой полости дросселя с диаметром отверстия 3 мм, а в штоковой – менее 2,7 мм увеличение давления в поршневой полости не наблюдается.
7.При учете деформации рабочей жидкости, находящейся в полостях гидроцилиндров и магистралях, диаметров отверстий в дросселях, утечек в гидро-
системе и работы предохранительных устройств математические модели меха-
низмов манипулятора наиболее точно отражают работу механизмов, а полученные расчетные зависимости совпадают с экспериментальными (см. гл. 6).
8.При внезапном снятии нагрузки (что предусмотрено технологией работы манипулятора) возникают колебания давления в гидросистеме, которые не-
обходимо учитывать при расчетах металлоконструкций и гидропривода.
9.Колебания груза в плоскости подъема стрелы при торможении подни-
мающейся (опускающейся) стрелы создают значительные колебания давления в гидросистеме и напряжений в металлоконструкции, которые необходимо учитывать при расчетах.
10.Пиковые значения давлений при разгоне и торможении винтового ротатора зависят от диаметров отверстий в дросселях, наличия предохранительных
устройств, характеристик рабочей жидкости, утечек в гидросистеме, а также
коэффициента податливости рабочей жидкости.
11.Дроссели, устанавливаемые в напорной и сливной магистралях гидроцилиндра подъема стрелы и привода рукояти "отсекают" вторичные предохра-
138
нительные клапаны в секциях гидрораспределителя, что может, при ошибках в расчетах, привести к значительному превышению давления, против предусмотренных гидросхемой.
12.Логарифмический декремент затухания колебаний давления при торможении опускающейся стрелы с грузом зависит от настройки предохранительного клапана.
13.Значительные пики давления (до 35 МПа) при резком торможении механизма поворота манипулятора в промежуточных положениях можно снизить уменьшив диаметр дроссельных отверстий или применив специальное устройство предложенное в работе [131], или соединив полости гидроцилиндра поворота через дроссель, или применив дроссели с обратным клапаном, или исключив дроссели из гидросхемы.
139
4. Исследование динамической нагруженности манипулятора при совмещении движений звеньев
иопределение эффективности совмещения
4.1.Исследование динамической нагруженности гидравлического манипулятора и обоснование целесообразности совмещения операции подъема стрелы и вращения рукояти
Динамические (инерционные) силы, возникающие вследствие неравномерного вращения стрелы и рукояти гидравлического манипулятора при равномерном движении штоков гидроцилиндров, оказывают весьма существенное влияние на расчетные нагрузки, преодолеваемые манипулятором в процессе работы. Эти силы, зависящие как от кинематических параметров манипулятора,
так и от скоростей движений штоков гидроцилиндров, могут быть значительно
снижены при совмещении движений звеньев, а, следовательно, повышена надежность металлоконструкции и гидрооборудования манипулятора. Кроме того, совмещение операций может обеспечить значительное повышение произво-
дительности манипулятора.
Так как время цикла движения рукояти и стрелы составляет более 50% времени полного цикла работы манипулятора, то наиболее целесообразным яв-
ляется совмещение этих операций. Однако совмещение операций связано с ус-
ложнением гидравлической схемы манипулятора, поэтому целесообразность
совмещения должна быть обоснована в каждом конкретном случае.
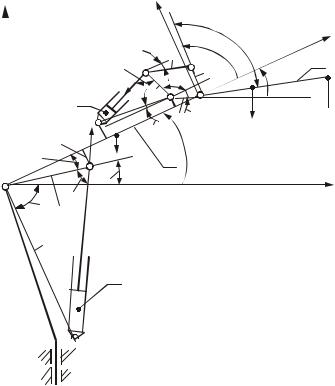
На рис 4.1 представлена кинематическая схема стреловой группы (стрела и рукоять с удлинителем) гидравлического манипулятора. Рассмотрим рукоять
с удлинителем как одно звено с одной степенью свободы потому, что инерци-
онные силы, возникающие при установившемся движении удлинителя, незначительны.
140
Y |
|
|
Y |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
c |
|
|
|
|
|
|
|
2 |
|
b2 |
|
||
|
|
|
1p |
|
|
c |
||
|
|
|
F2 а |
|
|
|||
|
|
4 |
|
О1 |
|
|||
|
|
D |
|
|
mpg |
|||
|
|
С |
|
d2 |
|
|
|
|
|
e |
F1 |
|
|
|
|
|
|
|
|
mcg |
|
|
|
|
||
|
|
А |
1 |
c |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
|
|
|
О |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
b1 |
|
|
|
|
|
|
|
а1 |
|
|
|
|
|
|
|
|
3
 В
В
Х1
2
 p mg
p mg
X
Рис. 4.1. Кинематическая схема стреловой группы гидравлического манипулятора: 1 – стрела; 2 – рукоять с удлинителем; 3 – гидроцилиндр подъема стрелы; 4 – гидроцилиндр привода рукояти
Введем следующие обозначения:
ОО1=lc – длина стрелы;
mc – масса стрелы с гидроцилиндром и механизмом привода рукояти; О1Д=lp- длина рукояти с удлинителем;
mp – масса рукояти с удлинителем и гидроцилиндром удлинителя. При-
нимаем, что центр тяжести стрелы лежит на прямой ОО1 и делит этот отрезок
пополам, а центр тяжести рукояти соответственно лежит в точке К, причем
О1К=ДК; |
|
|
c |
– угол подъема стрелы, |
|
|
c 1 ; |
(4.1) |
р |
– угол между осью рукояти и горизонтальной осью, |
|