

4.2.2. Системы координат
Положение самолета в пространстве может быть определено по отношению к различным системам координат. При рассмотрении динамики движения самолета обычно пользуются следующими системами координат: земной, связанной и скоростной.
1. Нормальная земная
система координат
![]() (рис. 4.2). Начало находится на поверхности
земли: в определенной точке взлетно-посадочной
полосы, в точке расположения ориентира,
в центре наземной силы и т.д. Оси
(рис. 4.2). Начало находится на поверхности
земли: в определенной точке взлетно-посадочной
полосы, в точке расположения ориентира,
в центре наземной силы и т.д. Оси
![]() и
и
![]() расположены в горизонтальной плоскости,
а ось
расположены в горизонтальной плоскости,
а ось
![]() направлена вверх (вдоль местной
вертикали). Ориентация осей
направлена вверх (вдоль местной
вертикали). Ориентация осей
![]() и
и
![]() зависит от решаемой задачи и полагается
неизменной (вращение Земли пренебрегается).
зависит от решаемой задачи и полагается
неизменной (вращение Земли пренебрегается).
2. Нормальная
система координат
![]() (рис. 4.2). Начало находится в центре масс
ЛА, оси
(рис. 4.2). Начало находится в центре масс
ЛА, оси
![]() и
и
![]() расположены в горизонтальной плоскости,
а ось
расположены в горизонтальной плоскости,
а ось
![]() направлена вверх. Оси нормальной и
нормальной земной систем координат
параллельны. Относительное положение
этих систем координат определяется
вектором
направлена вверх. Оси нормальной и
нормальной земной систем координат
параллельны. Относительное положение
этих систем координат определяется
вектором
![]() между их началами.
между их началами.
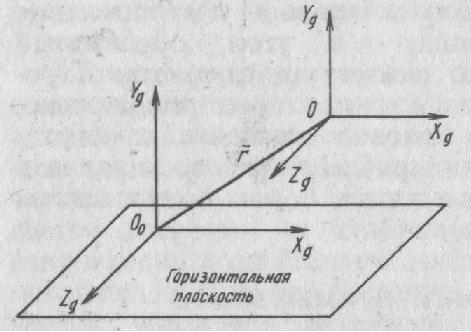
Рис. 4.2. Нормальная земная и нормальная системы координат
3. Связанная система
координат
![]() (рис. 4.3). Начало находится в центре масс
ЛА. Ось
(рис. 4.3). Начало находится в центре масс
ЛА. Ось
![]() лежит в плоскости симметрии ЛА, направлена
вдоль ЛА вперед и называется продольной
осью. Ось
лежит в плоскости симметрии ЛА, направлена
вдоль ЛА вперед и называется продольной
осью. Ось
![]() лежит в плоскости симметрии самолета,
направлена вверх (при нормальном полете)
и называется нормальной осью. Ось
лежит в плоскости симметрии самолета,
направлена вверх (при нормальном полете)
и называется нормальной осью. Ось
![]() направлена вправо по ходу самолета и
называется поперечной осью. Связанная
система координат жестко фиксирована
по отношению к самолету и её положение
относительно нормальной системы
определяет пространственное угловое
положение самолета. Оно характеризуется
эйлеровыми углами рыскания, тангажа и
крена.
направлена вправо по ходу самолета и
называется поперечной осью. Связанная
система координат жестко фиксирована
по отношению к самолету и её положение
относительно нормальной системы
определяет пространственное угловое
положение самолета. Оно характеризуется
эйлеровыми углами рыскания, тангажа и
крена.
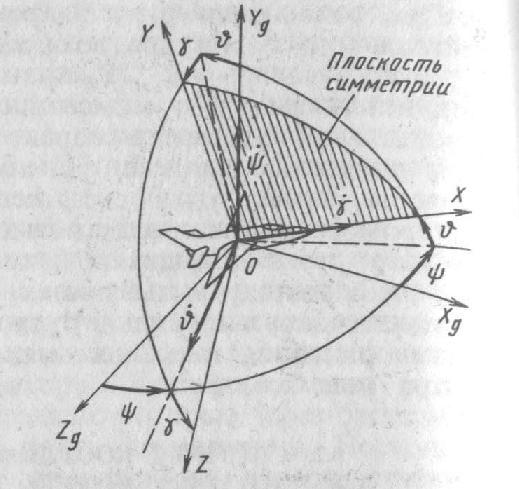
Рис. 4.3. Нормальная и связанная системы координат
Угол
![]() ,
образуемый при повороте ЛА вокруг
продольной оси
,
образуемый при повороте ЛА вокруг
продольной оси
![]() относительно положения, при котором
поперечная ось
относительно положения, при котором
поперечная ось
![]() горизонтальна, называется углом крена;
угол
горизонтальна, называется углом крена;
угол
![]() ,
образуемый проекцией продольной оси
на горизонтальную плоскость и заданным
направлением
,
образуемый проекцией продольной оси
на горизонтальную плоскость и заданным
направлением
![]() называется углом рыскания; угол
называется углом рыскания; угол
![]() ,
образуемый продольной осью ЛА с
горизонтальной плоскостью, называется
углом тангажа. Связанная система
координат используется при анализе
углового движения самолета.
,
образуемый продольной осью ЛА с
горизонтальной плоскостью, называется
углом тангажа. Связанная система
координат используется при анализе
углового движения самолета.
4. Скоростная
система координат
![]() (рис. 4.4). Начало находится в центре масс
ЛА. Ось
(рис. 4.4). Начало находится в центре масс
ЛА. Ось
![]() направлена вдоль вектора скорости ЛА
относительно воздушной среды и называется
скоростной осью. Ось
направлена вдоль вектора скорости ЛА
относительно воздушной среды и называется
скоростной осью. Ось
![]() лежит в плоскости симметрии, направлена
вверх (при нормальном полете) и называется
осью подъемной силы. Ось
лежит в плоскости симметрии, направлена
вверх (при нормальном полете) и называется
осью подъемной силы. Ось
![]() направлена вправо и называется боковой
осью. Эта система используется для
определения аэродинамических сил,
действующих на самолет.
направлена вправо и называется боковой
осью. Эта система используется для
определения аэродинамических сил,
действующих на самолет.
Положение вектора
воздушной скорости относительно
связанной системы характеризуется
углом атаки
![]() ,
т.е. углом между проекцией указанного
вектора на плоскость симметрии и
продольной осью, и углом скольжения
,
т.е. углом между проекцией указанного
вектора на плоскость симметрии и
продольной осью, и углом скольжения
![]() между вектором воздушной скорости и
плоскостью симметрии.
между вектором воздушной скорости и
плоскостью симметрии.
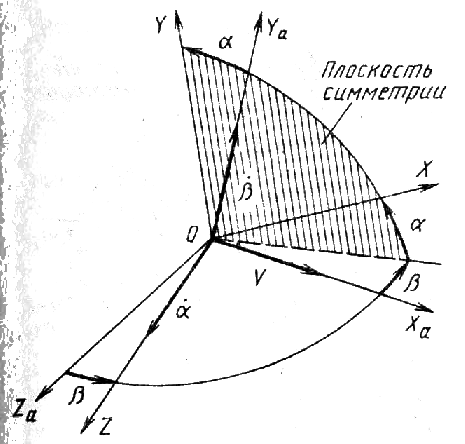
Рис. 4.4. Связанная и скоростная системы координат
4.2.3. Средства для определения положения ла относительно плоскости горизонта
Положение ЛА относительно плоскости горизонта определяется углами крена и тангажа. Для измерения углов крена и тангажа на самолетах используются устройства, называемые гировертикалями, основным элементом которых является гироскоп.
Гироскоп
Классическим гироскопом принято называть симметричное относительно оси вращения быстровращающееся тело, ось которого имеет возможность изменять свое положение в пространстве.
У гироскопов,
применяемых в технике, свободный поворот
оси гироскопа можно обеспечить, закрепив
сё в рамках (кольцах) 1, 2
так называемого карданового подвеса
(рис. 4.5),
позволяющего оси
![]() занять любое
положение в пространстве. Такой гироскоп
имеет 3 степени свободы: он может совершать
3 независимых поворота вокруг осей
занять любое
положение в пространстве. Такой гироскоп
имеет 3 степени свободы: он может совершать
3 независимых поворота вокруг осей
![]() ,
,
![]() и
и
![]() ,
пересекающихся в центре подвеса
,
пересекающихся в центре подвеса
![]() ,
который остаётся по отношению к основанию
3 неподвижным.
Если центр тяжести гироскопа совпадает
с центром
,
который остаётся по отношению к основанию
3 неподвижным.
Если центр тяжести гироскопа совпадает
с центром
![]() ,
то он называется астатическим
(уравновешенным), в противном случае –
тяжёлым.
,
то он называется астатическим
(уравновешенным), в противном случае –
тяжёлым.
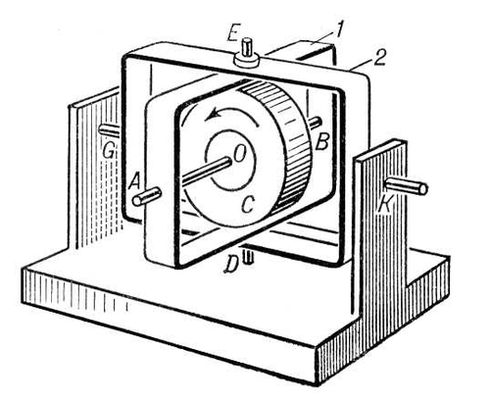
Рис. 4.5. Гироскоп в кардановом подвесе: ротор С, кроме вращения вокруг своей оси АВ, может вместе с рамкой 1 поворачиваться вокруг оси DE и вместе с рамкой 2 – вокруг оси GK; следовательно, ось ротора может занять любое положение в пространстве. О – центр подвеса, совпадающий с центром тяжести гироскопа.
Первое свойство уравновешенного гироскопа с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пространстве приданное ей первоначальное направление.
Второе свойство
гироскопа обнаруживается, когда на его
ось (или рамку) начинают действовать
сила или пара сил, стремящиеся привести
ось в движение (т.е. создающие вращающий
момент относительно центра подвеса).
Под действием силы
![]() (рис. 4.6)
конец
(рис. 4.6)
конец
![]() оси
оси
![]() гироскопа
будет отклонять не в сторону действия
силы, как это было бы при невращающемся
роторе, а в направлении, перпендикулярном
к этой силе; в результате гироскоп вместе
с рамкой 1 начнёт вращаться вокруг оси
гироскопа
будет отклонять не в сторону действия
силы, как это было бы при невращающемся
роторе, а в направлении, перпендикулярном
к этой силе; в результате гироскоп вместе
с рамкой 1 начнёт вращаться вокруг оси
![]() ,
притом не ускоренно, а с постоянной
угловой скоростью. Это вращение называется
прецессией; оно происходит тем медленнее,
чем быстрее вращается вокруг своей оси
,
притом не ускоренно, а с постоянной
угловой скоростью. Это вращение называется
прецессией; оно происходит тем медленнее,
чем быстрее вращается вокруг своей оси
![]() сам гироскоп. Если в какой-то момент
времени действие силы прекратится, то
одновременно прекратится прецессия и
ось
сам гироскоп. Если в какой-то момент
времени действие силы прекратится, то
одновременно прекратится прецессия и
ось
![]() мгновенно остановится, т.е. прецессионное
движение гироскопа безынерционно.
мгновенно остановится, т.е. прецессионное
движение гироскопа безынерционно.
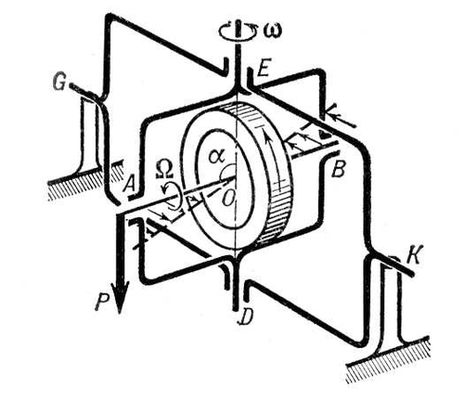
Рис. 4.6. Действие силы Р на гироскоп с вращающимся ротором; ось АВ движется перпендикулярно направлению Р.
Величина угловой скорости прецессии определяется по формуле:
![]() ,
,
![]() , (4.1)
, (4.1)
где
![]() – момент силы
– момент силы
![]() центра
центра
![]() ,
,
![]() ,
,
![]() – угловая скорость собственного вращения
гироскопа вокруг оси
– угловая скорость собственного вращения
гироскопа вокруг оси
![]() ,
,
![]() – момент инерции гироскопа относительно
той же оси,
– момент инерции гироскопа относительно
той же оси,
![]() – расстояние
от точки приложения силы до центра
подвеса гироскопа; второе равенство
имеет место, когда сила
– расстояние
от точки приложения силы до центра
подвеса гироскопа; второе равенство
имеет место, когда сила
![]() параллельна оси
параллельна оси
![]() .
Из формулы (5.1) непосредственно видно,
что прецессия происходит тем медленнее,
чем больше
.
Из формулы (5.1) непосредственно видно,
что прецессия происходит тем медленнее,
чем больше
![]() ,
точнее, чем больше величина
,
точнее, чем больше величина
![]() ,
называемая собственным кинетическим
моментом гироскопа.
,
называемая собственным кинетическим
моментом гироскопа.
Наряду с прецессией ось гироскопа при действии на неё силы может ещё совершать так называемую нутацию – небольшие, но быстрые (обычно незаметные на глаз) колебания оси около её среднего направления. Размахи этих колебаний у быстро вращающегося гироскопа очень малы и из-за неизбежного наличия сопротивлений быстро затухают. Это позволяет при решении большинства технических задач пренебречь нутацией.
Авиагоризонт
Гировертикаль, имеющая визуальную индикацию углов крена и тангажа, называется авиагоризонтом. Основным элементом авиагоризонта является гироскоп с тремя степенями свободы. Поскольку гироскоп сохраняет положение оси собственного вращения в инерциальном пространстве, в авиагоризонтах ось гироскопа приводится в вертикальное положение по отношению к Земле с помощью физического маятника, который используется для этой цели в то время, когда ЛА не имеет ускорений. В противном случае физический маятник показывает не истинную вертикаль, а направление, образованное равнодействующей от силы тяжести и инерционной силы.
Одним из наиболее распространенных в гражданской авиации авиагоризонтов является АГБ-3 (рис. 4.7). Собственная ось вращения гироскопа приводится в вертикальное положение системой маятниковой коррекции, в которую входят два однокоординатных электролитических маятника 20 и 21, управляющих коррекционными двигателями (датчиками моментов) 7 и 9. В цепи поперечной коррекции имеется контакт 16, который разрывает цепь при совершении самолетом разворотов, уменьшая виражную погрешность.
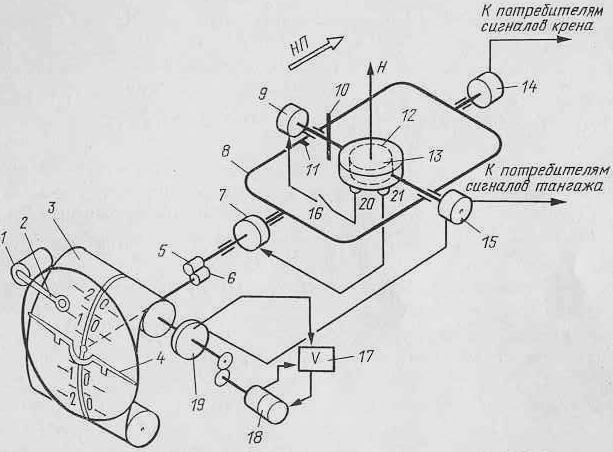
Рис. 4.7. Принципиальная схема авиагоризонта АГБ-3:
1 – двигатель; 2 – флажок; 3 – шкала тангажа; 4 – силуэт самолета; 5, 6 – трибки; 7, 9 – датчики момента; 8 – внешняя рама; 10, 11 – упоры; 12 – внутренняя рама; 13 – ротор гироскопа; 14, 15 – сельсины-датчики; 16 – контакт выключателя коррекции; 17 – усилитель; 18 – двигатель-генератор; 19 – сельсин-приемник; 20, 21 – однокоординатные электролитические маятники
Индикация по крену осуществляется с помощью силуэта самолета 4, механически связанного с внешней осью карданового подвеса гироскопа через трибки 5 и 6, а по тангажу с помощью шкалы 3, перемещающейся следящей системой, где датчиком угла является сельсин 15, установленный на оси тангажа. Упоры 10 и 11 необходимы для предотвращения совмещения главной оси гироскопа с внешней осью карданового подвеса при углах тангажа, близких к 90°.
Время готовности прибора к работе в авиагоризонте сокращают с помощью механического арретира (на рис. 4.7 он не показан). Арретир приводит оси прибора в определенное положение относительно осей самолета. Если самолет находится в горизонтальном положении, то собственная ось вращения гироскопа устанавливается в вертикальное положение. АГБ-3 имеет встроенную систему сигнализации отказа в цепи электрического питания прибора. Двигатель 1 выбрасывает в видимую часть прибора флажок 2, если обесточивается хотя бы одна из фаз напряжения 36 В переменного тока 400 Гц или 27 В постоянного тока.
Точность определения углов крена и тангажа ±1°, рабочие углы крена 360°, тангажа ±80°.