

5.5.2 Пассивные датчики
Резистивные датчики обычно используются для контроля линейных и угловых перемещений, давления, температуры и т.д. Принцип их действия основан на изменении активного электрического сопротивления под влиянием измеряемой величины. В зависимости от включения (как реостат или потенциометр) их подвижного элемента, механически связанного с рабочим механизмом, будет эквивалентно меняться и выходной сигнал.
Многие резистивные датчики относятся к безынерционным звеньям; их чувствительность обычно лежит в пределах от 3 до 5 В/мм. Резистивные датчики сопротивления могут быть каркасными и бескаркасными. Бескаркасные могут быть жидкостными или электролитическими. Для измерения угла поворота резистивные датчики имеют подвижный элемент, отклоняющийся на угол α (см. рис. 5.11 и 5.12).
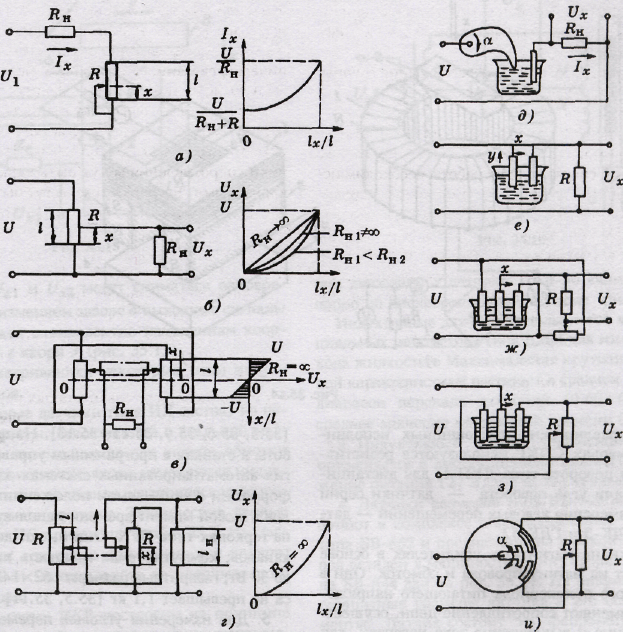
Рис. 5.11
В каркасных датчиках (рис. 5.11, а — г) в качестве сопротивления используются проволока с высокоомным удельным электрическим сопротивлением, слой полупроводника или пленка металла. Электролитические датчики (рис. 5.11, д — и) могут использоваться только в цепях переменного тока из-за разложения электролита и поляризации электродов при постоянном токе; их сопротивление сильно зависит от температуры. По указанным причинам наиболее предпочтительными являются дифференциальные схемы их включения. Выходной сигнал датчиков может быть в виде тока IХ (рис. 5.11, а) или напряжения Ux.
Вид характеристики в значительной степени зависит от значения сопротивления нагрузки. Например, для схемы по рис. 5.11, б выходное напряжение Ux выражается следующим равенством:
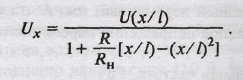
В зависимости от вида характеристики резистивные датчики могут быть линейными и нелинейными. Иногда преднамеренно характеристике придают специальный нелинейный вид. Для этого используют фигурные каркасы (рис. 5.12, а и б), шунтируют отдельные участки (рис. 5.12, в — д) или выполняют
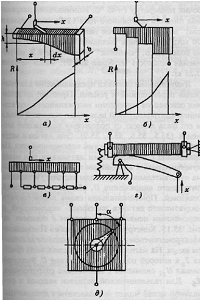
Рис. 5.12
их из материалов с различным удельным электрическим сопротивлением. На рис. 5.12, а, б представлены принципиальные схемы резистивных датчиков с фигурными каркасами. Каркасы имеют толщину b. Их высота h зависит от координаты х. При перемещении движка на длину dx происходит изменение сопротивления датчика на dR. Общее изменение сопротивления R датчиков от положения х их движка показано под соответствующими эскизами датчиков. В датчиках (рис. 5.12, в, г) каркасы не фигурные, но, тем не менее, эти датчики также позволяют получить нелинейную характеристику. Последнее достигается за счет шунтирования отдельных участков датчиков вспомогательными резисторами (рис. 5.12, в) или за счет закорачивания этих участков перекатывающимся фигурным контактом (рис. 5.12, г). В датчике, показанном на рис. 5.12?, д, за счет конструктивных особенностей при повороте движка на угол α выходной сигнал изменяется по закону синуса или косинуса.
В промышленности используются различные типы резистивных датчиков: Ш1, ДУП и др.
Принципиальные схемы датчиков линейных перемещений на магнитных усилителях приведены на рис. 5.13. Первый из них (рис. 5.13, а) представляет собой дроссельный магнитный усилитель, работающий в режиме вынужденного намагничивания. Если х=const, то ток, протекающий по резистору RH, будет постоянным и датчик работает, как стабилизатор среднего значения тока в нагрузке. При х=var происходит изменение тока I и напряжения U на резисторе RH. Чем дальше удален магнит 2 от магнитопровода 1, тем меньше показания амперметра и вольтметра. Ввиду известной стабильности характеристики управления дроссельного магнитного усилителя ток в резисторе будет мало зависеть от напряжения е питания, частоты сети I и сопротивления RH. В таких датчиках (при неизменном сопротивлении RH) удается обеспечить стабильность показаний приборов с точностью ±0,25 % при изменении напряжения питания на ±25 % .
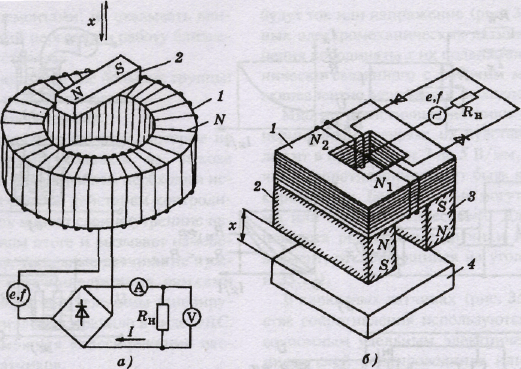
Рис. 5.13
Датчик линейных перемещений
(рис. 5.13, б) —
это магнитный усилитель с самоподмагничиванием,
управляемый
полем постоянных магнитов 2
и
3. При
перемещении ферромагнитной пластины
4
изменяется
магнитное состояние участков
магнитопровода
1,
на которых размещены рабочие обмотки
![]() и
и
![]() .
За счет этого изменяются угол насыщения
и как результат среднее напряжение на
резисторе.
.
За счет этого изменяются угол насыщения
и как результат среднее напряжение на
резисторе.
Лекция 23
Индуктивные
датчики предназначены
для измерения
перемещений и усилий. Принцип их действия
основан на изменении индуктивности под
влиянием
контролируемой величины; выходной
сигнал и его фаза
зависят от положения подвижного
элемента.
Эти
датчики могут работать
лишь с источниками переменного тока.
По сравнению
с резистивными датчиками они менее
чувствительны
к колебаниям температуры, но весьма
чувствительны
к перепадам частоты f
и значения питающего
напряжения U,
обладают
повышенной реакцией.
Принципиальная схема нереверсивного
индуктивного датчика линейных перемещений
с переменным немагнитным зазором 6
показана
на рис.
5.14. Конструктивно он подобен П-образному
электромагнитному реле с прямоходовым
движением якоря. На магнитопроводе
1
расположена обмотка 2,
к
которой подается напряжение U.
Выходной
сигнал
![]() снимается
с балластного сопротивления
снимается
с балластного сопротивления
![]() .
Для
гальванической развязки входной и
сигнальной
цепей может использоваться дополнительная
обмотка 2',
с
которой снимается сигнал
.
Для
гальванической развязки входной и
сигнальной
цепей может использоваться дополнительная
обмотка 2',
с
которой снимается сигнал
![]() .
.
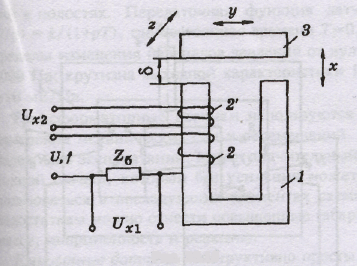
Рис. 5.14
Оба сигнала и могут сниматься одновременно. При неизменном зазоре δ выходные сигналы будут изменяться эквивалентно изменениям координат х, у или z якоря 3 (рис. 5.14).
Ниже рассматриваются некоторые типы индуктивных датчиков.
1.Индуктивные датчики типа ИД состоят из не подвижной обмотки, заключенной в стальной магнитопровод, и перемещающегося внутри обмотки якоря. При перемещении якоря изменяются индуктивность обмотки и ее полное электрическое сопротивление переменному току.
2.Датчики серии ИКВ построены на принципе преобразования линейного перемещения движущегося объекта в изменение индуктивного сопротивления обмотки со стальным сердечником. Их принципиальная схема включения показана на рис. 5.15. Датчик состоит из корпуса 1, внутри
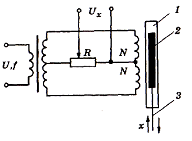
Рис. 5.15
которого перемещается плунжер (сердечник) 2, связанный посредством штока 3 с рабочим механизмом. При перемещении штока 3 вверх или вниз изменяется индуктивное сопротивление обмоток N. Сигнал снимается с не большого резистора R. Для уменьшения остаточного выходного сигнала Ux и для определения направления движения х датчики ИКВ-30 включаются попарно по дифференциальной схеме (рис. 5.15).
Индуктивные датчики используются в дифференциальных манометрах типа ДММ для измерения расхода жидкостей.
3. Индуктивный датчик перемещений типа Э применяется в дистанционных манометрах.
4. Датчики размеров типа БВ-908 и БВ-844 работают в комплексе с записывающим устройством типа БВ-662 и предназначены для контроля размеров деталей в машиностроении.
5. Датчики углового перемещения типов ОДУ (однокоординатные) и ДДУ (двукоординатные) применяются в гироскопических устройствах для измерения угла прецессии.
6. Датчики магнитного поля на герконах могут использоваться для измерения и анализа внешних созданных не индуктивной обмоткой магнитных полей и любых других физических величин, приводящих к изменению магнитного поля вокруг геркона.
Трансформаторные датчики являются разновидностью индуктивных датчиков. Они содержат магнитопровод 1 и две или более подвижные или неподвижные обмотки, некоторые из которых могут быть короткозамкнутыми (рис. 5.16). Работа этих датчиков основана на изменении магнитной связи, взаимной индуктивности между первичной (входной возбуждения) обмоткой 2 с числом витков NB и вторичными (выходными, сигнальными) обмотками 3 с числом витков NС, вызванном воздействием контролируемой величины.
Принципиальная схема датчика линейных перемещений с короткозамкнутым витком (экраном) показана на рис. 5.16. При нейтральном расположении экрана 4 в силу полной симметрии системы магнитный поток, создаваемый обмоткой 2, поровну распределяется в левую и правую части магнитопровода 1. ЭДС, наведенные этими потоками в сигнальных обмотках 3, равны между собой и направлены встречно. В итоге результирующий выходной сигнал Ux равен нулю. При смещении экрана 4 с нейтрали на некоторое
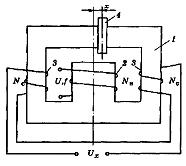
Рис. 5.16
расстояние х потоки в левой и правой частях системы будут различными, появится выходной сигнал, эквивалентный смещению на расстояние х экрана. Датчик прост и надежен, но чувствителен к колебаниям частоты и амплитуды питающего напряжения.
Трансформаторные датчики используются для измерения механических сил и перемещений. Они надежны в эксплуатации, имеют значительный выходной сигнал, который без усиления может использоваться в последующих элементах схемы. К недостаткам можно отнести повышенные габариты, массу, инерционность и реакцию.
Емкостные датчики конструктивно просты, надежны, обладают малой массой и габаритами, малой инерционностью и высокой чувствительностью; используются для измерения небольших перемещений, влажности, давления. Емкость датчика при внешнем воздействии может меняться за счет изменения зазора между электродами и их площади, механической деформации диэлектрика и его свойств. Емкость датчиков обычно мала (10-100 пФ), поэтому желательно работать на повышенных частотах. Чувствительность датчика зависит от конструкции, схемы включения и параметров, определяющих значение емкости. Конструктивно емкостные датчики подобны электролитическим резистивным датчикам. Рассмотрим некоторые из них.
1. Емкостные датчики серии ДЕ применяются для измерения линейных размеров деталей и контроля движущихся тел с диэлектрической проницаемостью, отличающейся от проницаемости вакуума.
2. Для непрерывного измерения уровня жидких легковоспламеняющихся, горючих, взрывоопасных и агрессивных сред используются датчики серии ЭИУ-1В. Их принцип действия основан на изменении емкости системы "земля — изолированный электрод" при погружении его в жидкость.
3. Датчики серии ЕДО предназначены для измерения пульсирующих и импульсных давлений воздуха и других газов; работают на принципе преобразования давления, приложенного к мембране, в изменение емкости.
4. Малогабаритные датчики серии ДК-М1 и ДК-М2 используются для измерения частоты и амплитуды пульсации давления на лопатках турбин.
Емкостные датчики магнитного поля на герконах в отличие от индуктивных датчиков на герконах не имеют индуктивной обмотки. Сигнал в них снимается с выводных концов геркона. Датчики служат для контроля параметров, приводящих к изменению магнитного поля вокруг геркона
Лекция 24