

4.1. Вспомогательные элементы и устройства приспособлений
4.1.1. Поворотные и делительные устройства
Эти устройства применяют в многопозиционных приспособлениях для придания обрабатываемой заготовке различных положений относительного инструмента.
Делительное устройство состоит из диска, закрепляемого на поворотной части приспособления, и фиксатора.

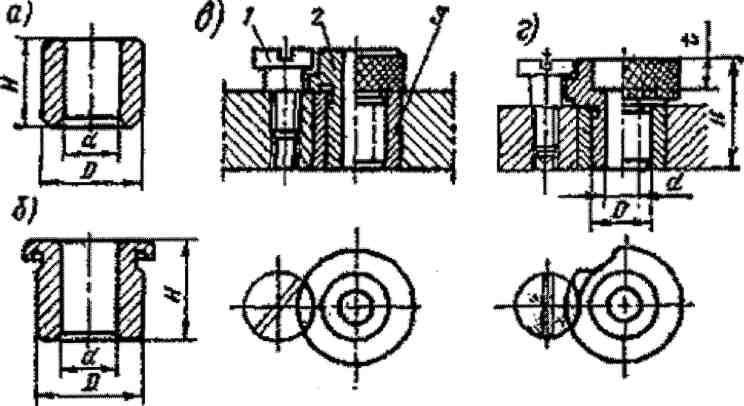
Рис. 4.1. Фиксаторы: а- шариковый; б, в - с вытяжными цилиндрическим и коническим пальцами соответственно кнопочного и реечного типа.
Шариковый фиксатор (рис. 4.1 а) наиболее прост в изготовлении, но не обеспечивает точное деление и не воспринимает момент сил обработки.
Фиксатор с вытяжным цилиндрическим пальцем (рис. 4.1 б) может воспринимать момент сил обработки, но не обеспечивает высокую точность деления из-за наличия зазора в подвижных соединениях.

Рис. 4.2. Выталкиватели: а - пружинный; б - рычажный; в - кнопочный.
Здесь суммарная погрешность шага, получаемая при делении и переносимая на обрабатываемую деталь зависит от допуска 1 на расстояние между осями двух соседних фиксирующих втулок, от зазоров S1 и S2 и возможного эксцентриситета втулок
= S1+S2+1+e
где: 1 ≤ 0,003 мм; S1 и S2 ≤ 0,015 мм.
Фиксатор с конической частью вытяжного пальца обеспечивает большую точность, так как S1=0 (рис. 4.1 в).
Поворотные устройства выполняют механическими, пневмомеханическими, гидравлическими, пневмогидравлическими.
Выталкиватели ручного и автоматического типа применяют для быстрого удаления небольших деталей из приспособлений. Выталкиватели повышают производительность и создают удобство в работе.
4.1.2. Устройства для координирования и направления инструмента
Для выполнения отдельных операций механической обработки жесткость режущего инструмента бывает недостаточной. Для устранения упругих отжатий инструмента и придания ему определенного положения в процессе обработки относительно заготовки применяют направляющие детали: кондукторные и направляющие втулки и копиры.
Втулки, в которых режущий инструмент направляется ее рабочей частью, называют кондукторными.
Они применяются при обработке отверстий стандартными сверлами, зенкерами и развертками. Поэтому отверстия в кондукторных втулках изготавливаются в системе вала по подвижной посадке. Оснащенные кондукторными втулками приспособления для обработки отверстий на станках сверлильной группы называют кондукторами
Направляющие втулки отличаются от кондукторных тем, что в них режущий инструмент направляется своей специально предусмотренной направляющей частью. Инструмент может иметь одну, либо две направляющие части (переднюю и заднюю). Так оформляются специальные зенкеры и развертки. Обычно направляющие втулки выполняют вращающимися на подшипниках скольжения или качения.
а - постоянная без бурта; б - постоянная с буртом; в -сменная; г - быстросменная.
Рис. 4.3. Стандартные кондукторные втулки
Постоянные втулки (рис. 4.3 а, б) применяются в кондукторах для мелкосерийного производства при обработке отверстий одним инструментом.
Сменные втулки (рис. 4.3 в, г) применяют в приспособлениях для массового и крупносерийного производства.
Втулки изготавливают из стали У10А, У12А, 9ХС, столь 20, сталь 20Х. Специальные втулки:

а - на уступе; б - на криволинейной поверхности.
Рис. 4.4. Специальные кондукторные втулки для сверления:
Накладные сверлильные кондуктора ориентируются по базовому отверстию или контуру обрабатываемой заготовки.
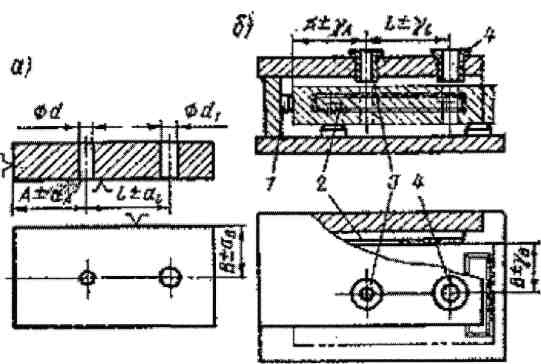
Рис. 4.5. Схема простановки размеров и допусков на сборочном чертеже кондуктора.
На практике допуски а на расстояние между осями двух втулок или назначают в 2 - 3 раза меньшими соответствующих допусков 4 на чертеже детали, или выбирают, пользуясь следующими рекомендациями:
• в кондукторах для обработки проходных отверстий под болты и неточных отверстий под резьбу допуски 2 берут в пределах от ± 0,05 до ± 0,1 мм;
• в кондукторах, где требуется обработка отверстий высокой точности, например под подшипники валов, а также для обработки отверстий многошпиндельными головками, допуски 1 уменьшают до ±0,02 мм.

Рис. 4.6. Направляющая втулка для борштанги (схема расточного приспособления).
На внутренней поверхности втулки имеется шпоночный паз для принудительного вращения втулки. Для облегчения попадания шпонки борштанги в паз втулки ее выполняют со скошенными краями.
Копиры применяются при обработке фасонных и сложнопрофильных поверхностей. Роль копиров - направлять режущий инструмент для получения заданной траектории его движения относительно заготовки. Обработку с копирами производят на фрезерных, токарных, строгальных, шлифовальных и других станках.