

3. 23. Анализ цифровых систем с обратной связью (замкнутых цифровых систем). Анализ устойчивости.
Решение линейного разностного уравнения
![]() ,
(83)
,
(83)
цифровой замкнутой системы управления можно представить в виде суммы двух составляющих:
![]() .
(84)
.
(84)
Слагаемое
![]() ,
обусловленное влиянием на систему
внешних воздействий v
[i],
,
обусловленное влиянием на систему
внешних воздействий v
[i],
![]() ,
,
![]() ,
называют вынужденным
движением
или частным решением уравнения (83).
Слагаемое
,
называют вынужденным
движением
или частным решением уравнения (83).
Слагаемое
![]() ,
вызванное ненулевыми начальными
условиями, имеет название свободного
движения
системы или общего решения однородного
уравнения (82). Название "свободное
движение" можно трактовать как
поведение системы в отсутствие внешних
сил, т.е. движение системы, предоставленной
самой себе, за счет внутренней энергии,
накопленной до рассматриваемого момента
времени.
,
вызванное ненулевыми начальными
условиями, имеет название свободного
движения
системы или общего решения однородного
уравнения (82). Название "свободное
движение" можно трактовать как
поведение системы в отсутствие внешних
сил, т.е. движение системы, предоставленной
самой себе, за счет внутренней энергии,
накопленной до рассматриваемого момента
времени.
Определение. Цифровая замкнутая система управления называется устойчивой (по начальным условиям), если ее свободное движение с течением времени затухает, т.е. если
![]()
![]() ,
,
и неустойчивой в противном случае. Это определение устойчивости, разумеется, применимо к разомкнутым цифровым системам и дискретным фильтрам, если в качестве рассматривать их свободные движения.
Следовательно, условия устойчивости цифровой системы с обратной связью аналогичны условиям устойчивости цифровой системы (дискретного фильтра) и могут быть сформулированы так:
Для
устойчивости замкнутой цифровой системы
управления необходимо и достаточно,
чтобы все корни
![]() ,
,
![]() ,
ее характеристического уравнения
,
ее характеристического уравнения
![]() ,
,
имели модули меньше единицы. Если хотя бы один из корней уравнения имеет модуль больше единицы, то
![]() ,
,
и, следовательно, цифровая замкнутая система является неустойчивой.
Графическая трактовка этого условия гласит:
1. Для устойчивости замкнутой цифровой системы управления необходимо, чтобы все корни ее характеристического уравнения располагались внутри окружности единичного радиуса комплексной плоскости Z.
2. Если хотя бы один из корней характеристического уравнения
,
расположен вне пределов этой окружности, то такая замкнутая система управления является неустойчивой.
Для исследования устойчивости замкнутых цифровых систем управления используют как алгебраические (например, критерий Джури, Шура-Коха), так и частотные критерии устойчивости.
Опустить
Из частотных критериев остановимся кратко на критерии Найквиста применительно к цифровой системе с единичной обратной связью (с одной степенью свободы).
Рассмотрим два случая применения критерия Найквиста.
Разомкнутая цифровая система устойчивая. Такая система является устойчивой, если все полюсы ее передаточной функции
 расположены
внутри окружности единичного радиуса.
При этом система не включает в себя
дискретных интеграторов и, следовательно,
на основании (70)
можно записать в виде
расположены
внутри окружности единичного радиуса.
При этом система не включает в себя
дискретных интеграторов и, следовательно,
на основании (70)
можно записать в виде
![]() ,
,
![]() ,
(85)
,
(85)
где k- безразмерный коэффициент усиления. Полагая
![]() ,
,
в (87), получаем амплитудно-фазовую характеристику разомкнутой цифровой системы
![]() ,
,
![]() .
.
Очевидно,
при
![]()
![]() ,
,
т.е.
АФХ разомкнутой системы начинается из
точки 0 абсциссой k,
расположенной на вещественной оси. С
учетом того, что
![]() есть рациональная функция z,
при
есть рациональная функция z,
при
![]() получаем
получаем
![]() .
.
Обычно
![]() .
Таким образом, в отличие от непрерывных
систем амплитудно-фазовая характеристика
разомкнутой цифровой системы заканчивается
не в начале координат, а в точке с
абсциссой
.
Таким образом, в отличие от непрерывных
систем амплитудно-фазовая характеристика
разомкнутой цифровой системы заканчивается
не в начале координат, а в точке с
абсциссой
![]() ,
расположенной
на вещественной оси.
,
расположенной
на вещественной оси.
Аналог
критерия Найквиста гласит: если
разомкнутая цифровая cиcтема
устойчивая, то для устойчивости замкнутой
цифровой системы необходимо и достаточно,
чтобы АФХ разомкнутой цифровой системы
![]() при изменении
при изменении
![]() от
0 до
не
охватывала критическую точку с
координатами
от
0 до
не
охватывала критическую точку с
координатами
(-1; j0). В качестве примера рассмотрим амплитудно-фазовые характеристики двух устойчивых разомкнутых цифровых систем (Рис.24).
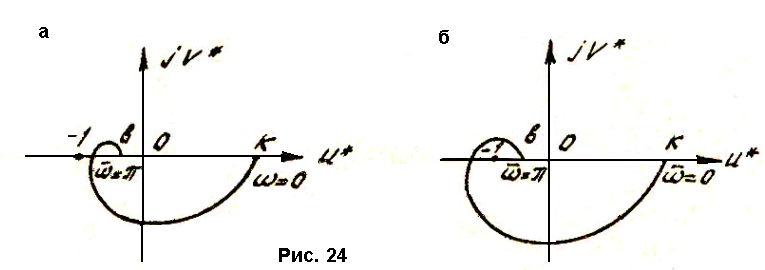
Согласно аналогу критерия Найквиста, в случае "а" замкнутая цифровая система также устойчивая, а в случае "б" она является неустойчивой.
Разомкнутая цифровая система является нейтрально устойчивой. При этом ее передаточная функция имеет вид
,
![]() .
(70)
.
(70)
Здесь определяет число дискретных интеграторов, входящих в функцию , а функция содержат все полюсы внутри окружности единичного радиуса. При получаем выражение для амплитудно-фазовой характеристики разомкнутой цифровой системы
 .
.
Отсюда нетрудно показать, что при
![]() ,
,
где b- вещественное число, а при
![]() ,
,
 .
.
Следовательно, АФХ разомкнутой нейтрально устойчивой цифровой системы начинается либо на вещественной (при четных ) либо на мнимой оси (при нечетных ) в бесконечно удаленной от начала координат точке, а заканчивается на вещественной оси.
Аналог
критерия Найквиста,
являющийся по существу модификацией
критерия Найквиста непрерывных систем,
гласит: если разомкнутая ЦСАУ является
нейтрально устойчивой, то для устойчивости
замкнутой цифровой системы необходимо
и достаточно, чтобы АФХ разомкнутой
цифровой системы
при
изменении
от 0 до
,
дополненная дугой бесконечно большого
радиуса в
четвертей окружности, не охватывала
точки с координатами (![]() ),
где
- число единичных полюсов разомкнутой
цифровой системы. На рис 25 приведены
две амплитудно-фазовые характеристики
разомкнутой цифровой системы для
),
где
- число единичных полюсов разомкнутой
цифровой системы. На рис 25 приведены
две амплитудно-фазовые характеристики
разомкнутой цифровой системы для
![]() .
.
Г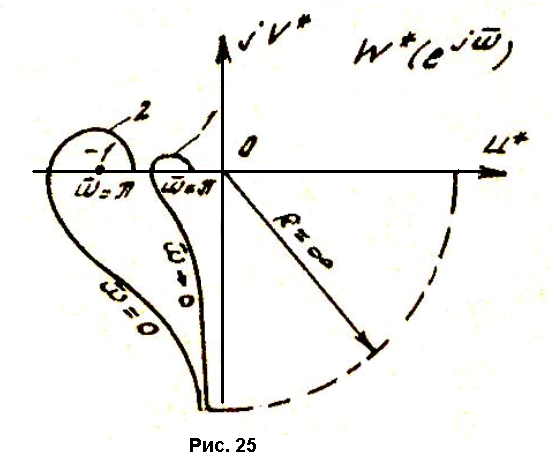 одограф
1, дополненный дугой в четверть окружности
бесконечно большого радиуса R,
не охватывает точки (
).
При этом замкнутая цифровая система
является устойчивой. Для годографа 2
аналог критерия устойчивости не
выполняется, что свидетельствует о
неустойчивости замкнутой цифровой
системы.
одограф
1, дополненный дугой в четверть окружности
бесконечно большого радиуса R,
не охватывает точки (
).
При этом замкнутая цифровая система
является устойчивой. Для годографа 2
аналог критерия устойчивости не
выполняется, что свидетельствует о
неустойчивости замкнутой цифровой
системы.
Лекция