

Лекция 25
2. Метод гармонической линеаризации.
П од
линеаризацией
понимают
приближенную замену нелинейной функции
линейной таким образом, чтобы по какому-то
выбранному показателю обе эти функции
совпадали.
од
линеаризацией
понимают
приближенную замену нелинейной функции
линейной таким образом, чтобы по какому-то
выбранному показателю обе эти функции
совпадали.
В способе гармонической линеаризации нелинейный Рис. 4 элемент заменяется квазилинейным звеном, параметры которого определяются при синусоидальном входном сигнале
![]() (5)
(5)
из условия равенства амплитуд первых гармоник на выходе нелинейного элемента и эквивалентного ему линейного звена.
Рассмотрим процедуру линеаризации для статического нелинейного элемента, уравнение которого имеет вид
. (6)
При поступлении на его вход гармонического сигнала (5) на выходе звена также будет периодический, но несинусоидальный сигнал
![]() .
(7)
.
(7)
Разложим его в ряд Фурье и получим
 ,
(8)
,
(8)
где будем полагать u0=0, что справедливо для симметричной нелинейной характеристики (6).
С учетом (7) коэффициенты ряда Фурье (8) определяются известными соотношениями
Используем только первые члены ряда разложения в (8), пренебрегая высшими гармониками, и получим
![]() .
(9)
.
(9)
Учтем,
что
,
![]() ,
следовательно,
,
следовательно,
 (10)
(10)
После подстановки (10) в (9) получим выражение для выходного сигнала нелинейного звена, точнее для первой гармоники реакции звена на гармоническое воздействие
 ,
,
которое, если принять обозначения
 (11)
(11)
можно записать в виде
 .
(12)
.
(12)
Здесь
![]() и
и
![]() -
коэффициенты гармонической линеаризации,
которые
зависят только от амплитуды.
-
коэффициенты гармонической линеаризации,
которые
зависят только от амплитуды.
Как видим, уравнение нелинейного звена (12) с точностью до высших гармоник является квазилинейным. При постоянных значениях амплитуды входного сигнала А коэффициенты гармонической линеаризации q1(A) и q2(A) являются постоянными. Однако различным значениям амплитуды A соответствуют разные коэффициенты q1(A) и q2(A). В этом заключается отличие гармонической линеаризации от обычной.
Таким образом, вместо нелинейного элемента с характеристикой (6) можно рассматривать эквивалентное линейное звено, поведение которого описывается уравнением (12). Оно может быть представлено в изображениях по Лапласу
 .
(13)
.
(13)
Для гармонически линеаризованного нелинейного элемента можно записать передаточную функцию
 ,
(14)
,
(14)
и
получить из нее при
![]() выражение
для частотной характеристики
выражение
для частотной характеристики
![]() .
(15)
.
(15)
Для однозначной статической нелинейной характеристики коэффициент
q2 (A) = 0,
и вместо (15) получим
![]() ,
(16)
,
(16)
Коэффициенты гармонической линеаризации типовых статических нелинейных звеньев приводятся в литературе.
Пример. Определить эквивалентную передаточную функцию нелинейного звена, которое представляет собой идеальное реле (рис. 5).
П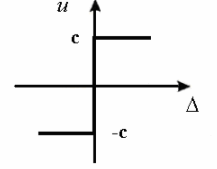 оскольку
идеальное реле имеет однозначную
статическую характеристику, выражение
для его передаточной функции (16) имеет
вид
оскольку
идеальное реле имеет однозначную
статическую характеристику, выражение
для его передаточной функции (16) имеет
вид
,
где коэффициент q1(A) определяется как
 .
.
Далее, учитывая полученные выражения для передаточной функции гармонически линеаризованного Рис. 5
нелинейного элемента (14), рассмотрим соотношения метода гармонического баланса.