

Моделювання процесів в складних медико-біологічних системах
Звернемося спочатку до якісного аналізу динамічної системи, що описується двома нелінійними диференціальними рівняннями довільного вигляду:
 (7.19)
(7.19)
Дослідимо стійкість стаціонарного стану такої системи, застосовуючи метод малих збурень і лінеаризації диференціальних рівнянь. Для цієї мети представимо розв’язок у вигляді суми стаціонарних значень змінних х0, у0 і малих збурень , :
х = х0 + , у = у0 + .
Лінеаризуючи систему диференціальних рівнянь, тобто залишаючи лише ті доданки, що містять перші степені малих збурень , , отримуємо
 (7.20)
(7.20)
де коефіцієнти а, b, c, d пов’язані з похідними
![]()
Важливе значення в якісному аналізі поведінки динамічних систем відіграє часова еволюція послідовних станів досліджуваної системи у вигляді траєкторії руху зображуючої точки у фазовому просторі х, у. Така траєкторія називається фазовим портретом, або фазовою кривою системи. В залежності від вигляду фазового портрету динамічні системи поділяються, як вже вказувалося раніше, на грубі та негрубі. “Грубі” системи – це системи, характер траєкторії яких у фазовому просторі зберігається при малих змінах похідних а, b, c, d. “Негрубі” системи – це такі, траєкторії яких відчувають достатньо різкі якісні зміни при малих варіаціях параметрів а, b, c, d.
Будемо шукати загальний розв’язок досліджуваної динамічної системи поблизу її стаціонарного стану у вигляді
= А ехр ( t), = B ехр ( t).
Тоді
звідки маємо
А = аА + bB, B = cA + dB.
Ненульовий розв’язок даної алгебраїчної системи рівнянь відносно коефіцієнтів А і В має місце лише при умові, що головний визначник рівний нулю:
![]() ,
,
або ![]() .
.
Звідси для коренів цього рівняння, яке зветься характеристичним, маємо
1, 2 = [( a + d)/2] {[(a + d)2/4] – (ad – bc)}1/2 .
Якщо корені не є кратними, то розв’язок системи може бути подано у такому вигляді:
 (7.21)
(7.21)
Нехай корені 1, 2 – дійсні. Тоді особливі точки у відповідності з класифікацією Пуанкаре (див. табл. 7.4) являють собою вузли або сідла, а саме:
а) 1 < 0, 2 < 0 – стійкий вузол;
б) 1 > 0, 2 > 0 – нестійкий вузол;
в) 1 > 0, 2 < 0 або 1 < 0, 2 > 0 – особлива нестійка точка, яка називається “сідлом”;
г) якщо 1, 2 – комплексно-спряжені величини, тоді у системі відбуваються коливання; особлива точка – фокус, причому, якщо Re1,2 < 0 – стійкий фокус, якщо Re1,2 > 0 – нестійкий фокус.
д) якщо Re = 0, то у системі відбуваються незатухаючі коливання; особлива точка – центр або граничний цикл. Зауважимо, що стійкий і нестійкий вузли, стійкий і нестійкий фокуси, а також сідла характеризують “грубі” системи, тоді як граничний цикл (центр) – “негрубі”.
Як вже зазначалося, поблизу критичних (біфуркаційних) точок малі зміни зовнішніх параметрів можуть призвести до якісних перебудов (біфуркацій) фазових портретів досліджуваних систем.
Розглянемо найбільш типові біфуркації:
1. Біфуркація з одного вузла (фокуса) в два вузла (фокуса).
За певних умов розв’язки, що відповідають стійкому вузлу (фокусу), можуть стати нестійкими і відбувається перехід у два нових стійких вузла. При відмінній від нуля уявній частині коренів характеристичного рівняння вузли перетворюються, очевидно, в фокуси.
2. Біфуркація Хопфа із фокуса в граничний цикл. Для цього випадку, вивченого вперше Хопфом, корені характеристичного рівняння є комплексно-спряженими числами
1 = Re1 + i Im1 , 2 = Re2 – i Im2.
При Re 0 корені наближаються до уявної вісі. У результаті первинно стійкий фокус перетворюється у граничний цикл, тобто у системі виникають періодичні в часі коливання.
3. Біфуркації граничного циклу. При подальшій зміні керуючих параметрів можуть відбутися нові перебудови фазових траєкторій системи, при яких можливі такі біфуркації: а) старий граничний цикл переходить в новий один або більше граничних циклів у одній і тій самій площині; б) старий двовимірний граничний цикл переходить у тривимірний граничний цикл, до того ж у випадку незамкнутих траєкторій виникає рух зображуючої точки по поверхні тора; в) старий граничний цикл з періодом Т1 переходить у новий, рухаючись по якому система повертається у початковий стан за час Т2 = 2Т1 (біфуркація подвоєння періоду).
4
Мал.
7.10. Фазовий портрет
дивного аттрактора.
Зручним методом аналізу стійкості фазових траєкторій є дослідження так званих показників Ляпунова. Не вдаючись у достатньо тонкі і складні математичні деталі, показники Ляпунова можна визначити як узагальнення показника степені у виразі для експоненціального в часі розв’язку х(t), який характеризує диференціальне рівняння першого порядку довільного вигляду, а саме:
![]() .
.
Кількість показників Ляпунова не повинна перевищувати розмірність простору, в якому задана шукана величина x(t). Тоді виявляється можливим сформулювати такі критерії для простих і дивних аттракторів у термінах показників Ляпунова (розглянемо для визначення тривимірний випадок):
а) якщо всі три показники Ляпунова від’ємні, то аттрактор – стійкий фокус;
б) якщо два показники від’ємні, а третій рівний нулю, то аттрактор – граничний цикл;
в) якщо один показник від’ємний, а два інші дорівнюють нулю, то аттрактор – стійкий тор;
г) якщо один з показників Ляпунова виявляється додатнім, то стає можливим хаотичний рух зображуючої точки. Так, при 1 0, 2 = 0, 3 0 виникає дивний (хаотичний) аттрактор, до того ж фазові сусідні траєкторії швидко розходяться при незначній зміні початкових умов. Одним з перших прикладів дивного аттрактора стала гідродинамічна (метеорологічна) модель Лоренца, розв’язки якої виявили хаотичне розбігання фазових траєкторій в силу ефектів турбулентності і неточності задання початкових умов. Зауважимо, що при 1 0, 2 = 3 = 0 або при 1 0, 2 0, 3 = 0 фазові портрети системи є відповідно нестійкий тор або нестійкий граничний цикл, які не є аттракторами.
Для встановлення універсальних закономірностей в самоорганізованих системах, які мають різні геометричні розміри, розуміння ролі їх спонтанного ускладнення, наявності в них просторово корельованих областей широко залучаються методи кінетичних моделей, які були покладені в основу сучасної теорії дисипативних структур (І.Р. Пригожин, Г. Ніколіс, П. Гленсдорф та інші).
В якості конкретного прикладу кінетичної моделі розглянемо відому модель “хижак-жертва”, яку запропонували А. Лотка і В. Вольтера. Система нелінійних диференціальних рівнянь цієї моделі має вигляд:
 (7.21)
(7.21)
Перше рівняння описує динаміку чисельності першого типу тварин – “жертв“ (наприклад, зайців), які живляться рослинами. Перший доданок у правій частині цього рівняння описує природне розмноження жертв, тоді як другий – їх зменшення від зустрічей з “хижаками“ (наприклад, рисями). Друге рівняння характеризує динаміку зміни чисельності хижаків: перший доданок у правій частині задає збільшення хижаків, які живляться жертвами, а другий – природне зменшення жертв при відсутності цієї їжі.
Проведемо аналіз моделі “хижак-жертва“. Стаціонарний розв’язок моделі визначається з наступної системи рівнянь:
 (7.22)
(7.22)
Лінеаризація рівнянь системи (7.21) поблизу стаціонарного розв’язку дає
 (7.23)
(7.23)
Шукаючи розв’язок цієї системи у вигляді
ζ = А ехр ( t), = B exp ( t), (7.24)
отримуємо характеристичне рівняння:
![]() ,
,
або
2 + 12 = 0,
звідки отримуємо шукані корені
1,2 = і (12)1/2. (7.25)
Таким чином, у відповідності до класифікації особливих точок по А. Пуанкаре отримана особлива точка в моделі “хижак-жертва“ є центр (або граничний цикл). Фазові криві являють собою замкнуті траєкторії.
Оскільки для малих збурень ζ(t) і (t) мають місце співвідношення вигляду
 (7.26)
(7.26)
то цей результат відображає те, що ми спостерігаємо в реальних умовах, тобто експериментально, а саме: періодичну зміну чисельності популяцій хижаків і жертв (див. мал. 7.11).
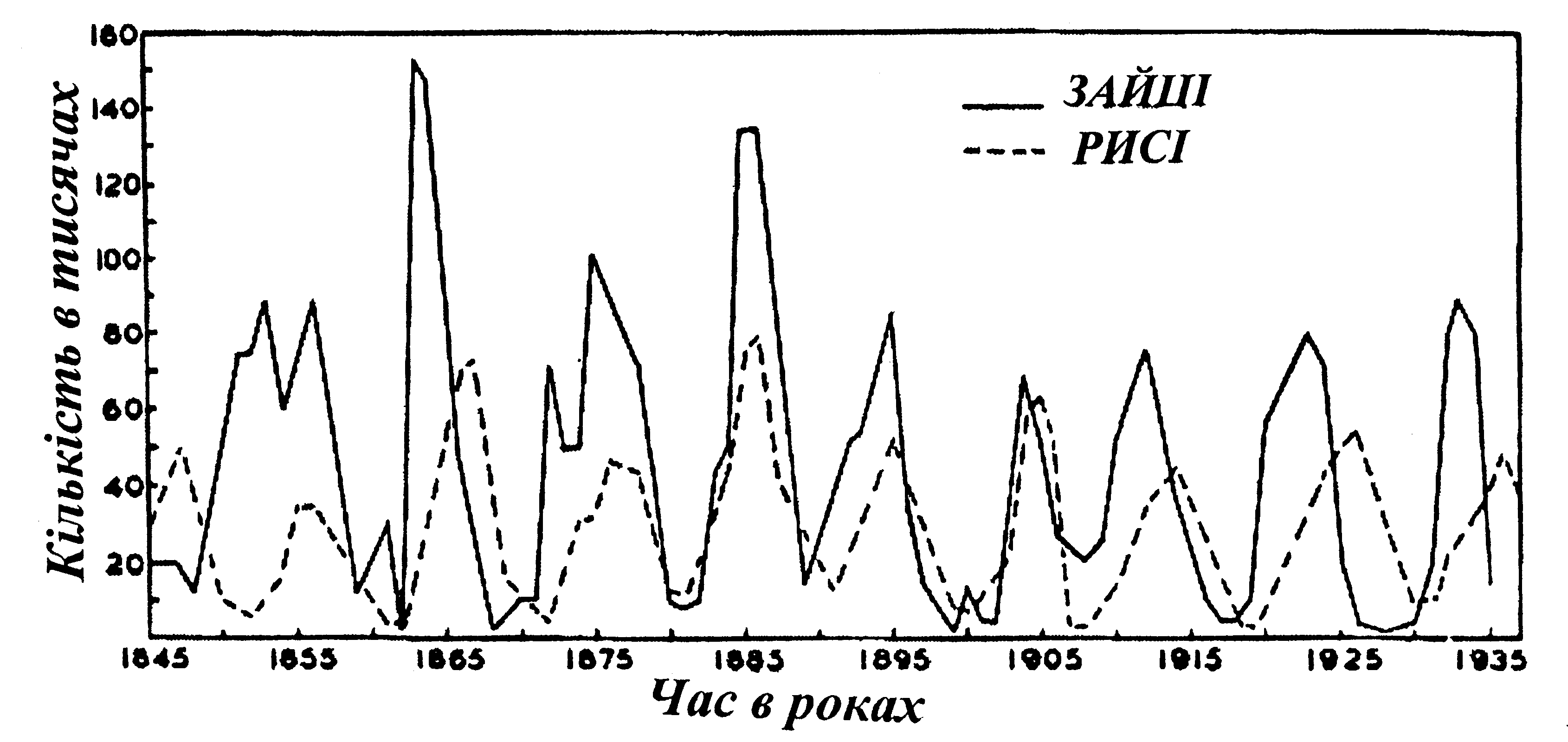
Мал. 7.11. Періодична зміна чисельності популяції в екологічній системі “хижак(рисі) - жертва (зайці)” за даними “Хадсон-Бей” (з книги Г. Хакена “Синергетика”).
Недолік розглянутої вище моделі Лотка-Вольтерра – її “негрубість“. Іншими словами, випадкові зміни чисельності одного з видів змінюють амплітуди коливань кожного виду. В реальності такого не спостерігається. Покращання моделі Лотка-Вольтерра пов’язане з врахуванням самообмежень в зростанні чисельності обох популяцій, що описується введенням останніх (третіх) доданків в рівняння моделі
 (7.27)
(7.27)
Дослідження особливих точок для такої покращаної моделі показує, що якщо при 11 = 22 = 0 особлива точка являла собою центр або граничний цикл (негруба система), то при 11 0, 22 0 особлива точка є вже стійкий фокус або стійкий вузол, тобто система стає грубою.
Ще одним популярним прикладом кінетичних моделей процесів самоорганізації, як вже відзначалося, є модель “брюселятора“ (Пригожин, Ніколіс, Лефевр), яка описує хімічний автокаталітичний процес. Близька до “брюселятора“ кінетична модель “орегонатора“ була запропонована і досліджена Філдом і Ноейсом. Зокрема, модель “орегонатора“ описує автохвильові процеси, які виникають в періодичній окисно-відновній реакції Бєлоусова-Жаботинського.