

2. Послідовність виконання роботи
Ознайомитись з електричними машинами, блоками кранового електропривода і навантажувального пристрою. Підібрати необхідну апаратуру та вимірювальні прилади для експериментальної установки.
Скласти схему електропривода механізму переміщення, налагодити її і випробовувати у різних режимах,
Зняти механічні характеристики електропривода переміщення для одного з напрямків руху. Для вибраного або заданого викладачем моменту статичного навантаження визначити діапазон D регулювання швидкості. Визначити, як зміниться діапазон регулювання швидкості при зміні моменту статичного навантаження на 50% щодо вихідного значення.
Зарисувати з екрана осцилографа процеси зміни швидкості під час пуску, реверсу і зупинки. Процеси зарисувати для швидкого переміщення рукоятки контролера і для двох значень моменту статичного навантаження. Визначити середнє прискорення для вказаних режимів.
Визначити наслідки і причину введеної викладачем у систему керування приводом механізму переміщення, неполадки.
Перевести схему лабораторної установки у режим електропривода механізму піднімання і випробувати її.
Зняти механічні характеристики електропривода піднімання для роботи на піднімання і опускання. Для вибраного або заданого викладачем моменту статичного навантаження визначити діапазони регулювання швидкості при роботі у вказаних режимах. Визначити, як зміняться ці діапазони при зміні моменту статичного навантаження на +50% відносно вихідного значення. .
Зарисувати з екрана осцилографа процеси зміни швидкості під час пуску на піднімання, зупинки після піднімання, пуску на опускання, зупинки після опускання, реверсу з піднімання на опускання і з опускання на піднімання. Процеси зарисувати при швидкому переміщенні рукоятки контролера для одного значення моменту статичного навантаження. Визначити середнє прискорення у вказаних режимах.
Визначити наслідки і причину введеної викладачем неполадки у систему керування електроприводом механізму піднімання.
Зробити висновки для кожного з проведених експериментів і скласти звіт.
3. Опис установки
Схема лабораторної установки (рис. 5.7) розроблена на основі промислових схем керування приводами переміщення і піднімання з використанням асинхронного двигуна з фазним ротором і силового контролера. З метою максимального наближення приводу установки до промислових приводів на валі асинхронного двигуна з фазним ротором М1 встановлене механічне гальмо з електромагнетним приводом.
Швидкість двигуна МІ змінюється шляхом несиметричного регулювання опорів резисторів в роторному колі за допомогою контактів К8, К6 і К4 силового контролера BG, що має до 5 положень для кожного напрямку руху і нульове положення.
Електропривод лабораторної установки забезпечує характеристики електропривода механізму переміщення (обертання) крана, або характеристики механізму піднімання, залежно від положення тумблера S1. При увімкненому тумблері в усіх положеннях контролера, крім нульового, контактор К2 має живлення, відповідно, його силові контакти замкнені і на статор двигуна подається змінна напруга мережі. При перестановці контролера з одного напрямку в другий за допомогою контактів КІ, КЗ, К5 і К7 змінюється послідовність чергування фаз на статорі і ротор двигуна реверсується. В різних положеннях контролера в роторне коло двигуна вводиться різна комбінація несиметричних опорів резисторів, в результаті чого отримується 5 симетричних характеристик для одного напрямку переміщення і для другого. Такі характеристики відповідають характеристикам електроприводів механізмів переміщення (обертання) кранів.
При розімкненому тумблері S1 система забезпечує характеристики електроприводів механізмів піднімання-опускання. В положеннях контролера на піднімання ( ) живлення отримує контактор режиму двигуна К2 і електропривод лабораторної установки забезпечує такі ж характеристики, як і в попередньому випадку (І квадрант). Цей режим використовується для піднімання вантажів.
Для одержання жорстких механічних характеристик для режиму опускання вантажів (ІV квадрант) використовується режим динамічного гальмування двигуна з самозбудженням. В цьому випадку при перестановці контролера в положення 1-4 на опускання ( ) контактор К2
|
Рис.5.7. Принципова схема лабораторної установки |

втрачає, а контактор К4 - одержує живлення. Відповідно, силові контакти К2 розмикаються, а силові контакти. К4 - замикаються, двигун вимикається від мережі, а на його статорну обмотку подається випрямлена діодним мостом VD10-VD15 ЕРС ротора. Регулювання швидкості у цьому випадку здійснюється зміною величини ЕРС , що знімається з роторного кола і опору роторного кола, що приводить до зміни струму намагнечення двигуна. Початкове намагнечення двигуна у цьому режимі здійснюється від мережі через VD9, резистор R3 і розмикаючий контакт К2. При перестановці контролера в 5-те положення на опускання контактор К4 втрачає, а контактор К2 - одержує живлення. Відповідно, силові контакти К4 розмикаються, а силові контакти К2 - замикаються, і на двигун подається змінна напруга мережі. Отримується 5-та характеристика на опускання, яка використовується для опускання вантажів зі швидкістю, вищою за синхронну, або для силового опускання.
Подають живлення на схему, коли контролер знаходиться в нульовому положенні, натискаючи кнопку SB1 При цьому одержує живлення котушка контактора КІ, його силові контакти КІ замикаються і на силову частину схеми подається напруга. Допоміжні контакти КІ шунтують кнопку SB1 і контакт КІ2 контролера та подають живлення на схему керування, даючи дозвіл на увімкнення інших контакторів. При переводі рукоятки контролера із нульового в інше положення отримує живлення котушка YB електромагнету гальма, внаслідок чого ротор двигуна розгальмовується. Якщо контролер повертається в нульове положення, втрачає живлення котушка YB і ротор двигуна зупиняється за рахунок гальма. Аналогічно відбувається зупинка при натисканні кнопки SB2 . При цьому також знімається напруга з силової частини схеми і схеми керування.
В схемі передбачено максимальний струмовий захист, який здійснюється струмовими реле КАІ, КА2. При перевищенні струмом статора допустимого значення спрацьовує реле струму КАІ або КА2 та їх контакти в колі котушки КІ розмикаються, контактор КІ втрачає живлення і вимикає двигун з мережі. Захист панелі керування здійснюється запобіжником FU. Живлення на установку подається автоматичним вимикачем QF1. Для того, щоб не допустити одночасного вмикання контактора режиму двигуна К2 і контактора динамічного гальмування К4, в колі котушки К2 є розмикаючий контакт К2. . .
В системі передбачена можливість часткової автоматизації пуску двигуна. В нульовому положенні контролера реле часу КТ має живленні його розмикаючий контакт КТ в колі котушки КЗ розімкнутий. При різкій перестановці контролера, наприклад, в 5-те положення, котушка реле часу КТ втрачає живлення. Контакт КТ в колі котушки КЗ замикається з витримкою часу, протягом якого в роторному колі двигуна залишається введеною частина додаткового резистора. Завдяки цьому зменшується пусковий струм і момент двигуна.
В схемі, за винятком контактора К4 і реле часу КТ, використовується апаратура змінного струму. Живлення котушок КТ і К4 здійснюється напругою, що випрямляється діодними мостами VDІ-VD4 і VD5-VD8.
Схема керування містить, крім розглянутих елементів, також ряд тумблерів (на схемі не показані), які дають змогу викладачеві вводити у неї неполадки.
Частина схеми, обведена на рис. 7 пунктирною лінією, змонтована на візку. З іншими елементами схеми ця частина з'єднується за допомогою затискачів. За допомогою затискача корпус візка з'єднується також з контуром заземлення, що забезпечує дотримання вимог правил техніки безпеки.
Навантаження двигуна МІ кранового електропривода створюється класичним навантажувальним пристроєм за системою Г-Д у складі машин постійного струму М2, М3 і асинхронного двигуна з короткозамкненим ротором М4.
Більшу зручність у роботі забезпечує навантажувальний пристрій за системою “кероване джерело струму – двигун” (рис.5.8). Якщо пристрій не використовується в інших роботах, його треба застосовувати при дослідженнях. Навантажувальний пристрій на рис. 8 - універсальний. За його допомогою на валі досліджуваного двигуна можна створювати статичні навантаження, характерні для електроприводів загально-промислових механізмів, а саме:
а/ активний момент статичного навантаження, Мс—const]
б/ реактивний момент статичного навантаження /момент тертя/, Mc=|Mc|sign ;
в/ вентиляторний момент статичного навантаження, Мсf(2).
Крім цього, за його допомогою можна забезпечувати стрибкоподібне збільшення або зменшення навантаження.
Навантажувальний пристрій виконано на основі однофазного реверсивного тиристорного перетворювача АІ . Перетворювач живить якір двигуна М. Зменшення пульсацій струму якоря забезпечує дросель L1. Двигун М створює навантаження на валі двигуна, що досліджується (на рис. 8 не показаний). Перетворювач АІ охоплений від’ємним зворотним зв’язком за струмом; для цього використані елементи: шунт К5 давач струму АА і регулятор струму на операційному підсилювачі DАІ.
Цей зв’язок забезпечує, в принципі, пропорційність між струмом якоря двигуна і сигналом завдання, що надходить на регулятор струму при невеликому темпі зміни швидкості досліджуваного двигуна. Дотримання вказаної пропорційності при великому темпі зміни швидкості забезпечує додатний зворотний зв’язок за напругою двигуна, який заведений на регулятор струму через резистор R9 . Цей зв’язок реалізує відомий метод компенсації впливу проти ЕРС двигуна на роботу контура струму. Додатний зворотний зв’язок виконано за допомогою дільника напруги на резисторах (R9,RЗ і давача напруги AU).
На вхідні резистори R5, R6, R7 і R8 регулятора струму надходять сигнали задання, які забезпечують вказані вище види навантаження. При реалізації залежності Мc = const сигнал задання надходить з потенціометра R12. Положення тумблера S3 визначає квадранти механічної характеристики, через які проходить вказана залежність.
Значення сигналу, що надходить на резистор R6, можна за допомогою тумблера S2 змінювати стрибкоподібно, тобто забезпечувати відповідну зміну навантаження досліджуваного двигуна,
Реалізацію залежності Mc=|Mc| sign забезпечує вузол на операційному підсилювачі DА2, який має релейну характеристику. Значення напруги, що надходить на потенціометр R15, визначає напруга пробиття стабілітрона VD1, а її полярність - напрямок швидкості . Швидкість контролюється за допомогою тахогенератора BR. Для того, щоб характеристика Mc = |Mc| sign проходила через необхідні квадранти механічної характеристики, служить тумблер S1.
Квадратичну залежність Мс f(2) забезпечує вузол на операційному підсилювачі DАЗ. Параметри його вхідного кола (R18, R19, R20, VD2, VD3) - підібрані так, щоб апроксимувати квадратичну залежність вихідної напруги підсилювача від швидкості трьома прямолінійними ділянками. Потенціометр R23 узгоджує параметри цього кола з характеристикою тахогенератора ВR , а потенціометр R2І - механічні характеристики досліджуваного двигуна і двигуна М.
Живлення операційних підсилювачів і давачів АА і АU напругами 15 В забезпечує блок живлення А2. Живлення на тиристорний перетворювач АІ подає магнетний пускач К при натисканні кнопки SB1 (”Пуск”). Реле максимального струму КА захищає перетворювач А і
|
Рис.5.8. Навантажувальний пристрій за системою “кероване джерело струму – двигун” |
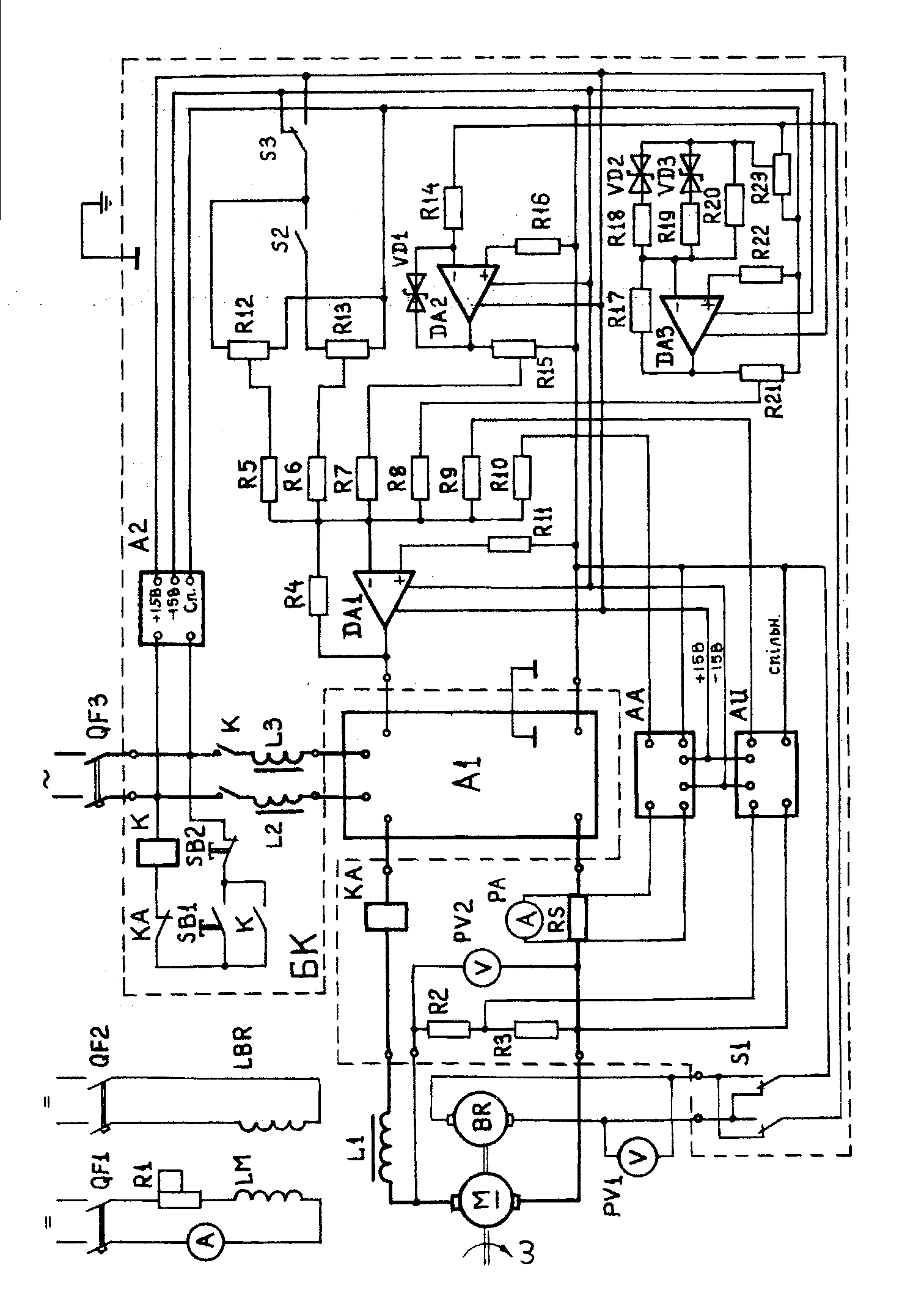
двигун М від аварійних режимів. Зменшення струмів короткого замикання і захист тиристорів перетворювача забезпечують реактори L2 і L3 .
У конструктивному відношенні елементи, обведені на рис, 8 пунктирною лінією, об’єднані у блок керування БК. До цього блока підмикається за допомогою роз’ємів тиристорний перетворювач АІ і за допомогою затискачів - інші елементи схеми.