

Міністерство освіти україни національний університет “львівська політехніка”

Дослідження електроприводів кранових механізмів інструкція
до лабораторної роботи № 5
з курсів “АВТОМАТИЗОВАНИЙ ЕЛЕКТРОПРИВОД ТИПОВИХ ВИРОБНИЧИХ МЕХАНІЗМІВ”
для студентів спеціальності 7.092203
"Електропривод і автоматизація промислових установок і виробничих комплексів" та
“ЕЛЕКТРООБЛАДНАННЯ ЦЕХОВИХ ТРАНСПОРТНИХ ЗАСОБІВ”
спеціальності 7.092201.
“Електричні системи та комплекси транспортних засобів”
Піднімально-транспортні механізми циклічної дії широко використовуються у всіх галузях промисловості. До них, зокрема, належать мостові, козлові, контейнерні, баштові і портальні крани. Незважаючи на різноманітність кранів, всі приводи можна за характером навантаження і умовами роботи розділити на електроприводи механізмів піднімання і механізмів переміщення (обертання).
В зв’язку з масовим використанням кранів практично кожен інженер-електроприводчик має з ними справу. Тому вивчення специфіки вказаних електроприводів кранових механізмів є важливим практичним завданням.
І. Основні відомості
Типова кінематична схема механізму піднімання зображена на рис. 5.І, а. Двигун Д з'єднаний з понижуючим редуктором Р, вихідний вал якого приводить в рух барабан Б. На барабан намотано трос, до якого підвішений вантаж С. Забезпечує гальмування при вимкненні двигуна від мережі гальмо Г.
В механізмі переміщення (рис. 5.2,а) двигун Д встановлено на візку, а вихідний вал редуктора приводить в рух колеса візка, які котяться рейками. В механізмах обертання (рис. 2,6) вихідний вал редуктора з'єднано з ведучою шестернею ВШ, яка оббігає зубчатий вінець 3В, закріплений нерухомо. Внаслідок цього платформа з двигуном, редуктором та іншим обладнанням повертається довкола осі 3В.
Механізми піднімання працюють з активним навантаженням (напрям статичного моменту не залежить від напрямку руху). Активний статичний момент навантаження Мвант створюється підвішеним вантажем.
В реальних механізмах є втрати тертя, що зумовлюють наявність реактивного моменту Мтер , що завжди перешкоджає рухові, змінюючи свій знак при зміні його напрямку. При цьому сумарний приведений до вала двигуна статичний момент Мс є алгебраїчною сумою моментів Мвант і Мтер. Діаграма такого навантаження наведена на рис. 1,б.
Статичне навантаження для механізмів переміщення і обертання створюють сили тертя у кінематичних ланках, тому воно має реактивний характер, тобто при зміні напрямку руху напрям статичного моменту змінюється. Його діаграма показана на рис. 2,в.
Наявність одно- та багатоступеневих редукторів в приводах кранових механізмів приводить до утворення значних люфтів в передачах. В механізмах піднімання внаслідок наявності підвішеного вантажу люфт, як правило, вибраний. В механізмах переміщення люфт вибирається під дією моменту двигуна декілька разів за цикл. Враховуючи великий момент інерції механізмів переміщення і обертання, вибір люфтів може викликати в них значні динамічні навантаження.
Як правило, піднімальні крани мають неавтоматизований робочий цикл, що на всіх ділянках здійснюється за командою оператора. Таким чином, механізми кранів є типовими позиційними механізмами з ручним керуванням. Масовість використання і досить важкі умови роботи електроприводу кранових механізмів визначають досить жорсткі вимоги щодо простоти їх експлуатації і високої надійності роботи. Тому схеми таких приводів повинні бути максимально спрощені, навіть за рахунок послаблення вимог до статичних та динамічних характеристик.
Головною технологічною вимогою, що впливає на вибір схеми електроприводу кранових механізмів, є вимога регулювання швидкості. Потрібний діапазон регулювання швидкості D визначається відношенням робочої швидкості до мінімальної, що необхідна за умовами роботи.
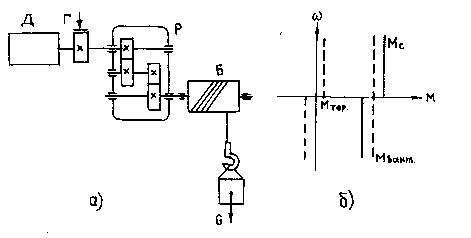
Рис.5.1. Кінематична схема механізму піднімання (а)
та діаграма статичного моменту (б)
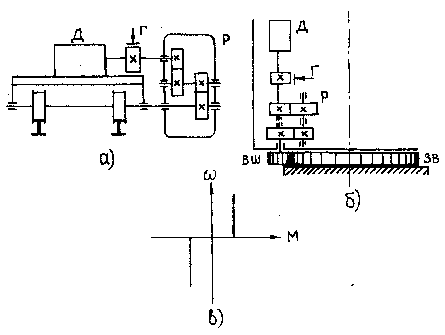
Рис.5.2. Кінематичні схеми механізмів переміщення (а), обертання (б)
та діаграма статичного моменту (в)
Мінімальна швидкість для механізмів піднімання визначається умовами плавного опускання вантажів у потрібне місце. При управлінні механізмами переміщення перехід на понижену швидкість дає змогу здійснювати зупинку з необхідною точністю. Як було вказано вище, механізм переміщення і обертання мають люфти в передачах. Для забезпечення плавного вибору люфтів до електроприводів цих механізмів ставиться вимога обмеження пускового моменту і прискорення. Обмеження прискорення потрібне також для зменшення розгойдування підвищених вантажів.
Ці вимоги можуть бути забезпечені при використанні систем електроприводів змінного і постійного струму.
До систем змінного струму належать електроприводи, в яких використовується:
а) асинхронний двигун з короткозамкненим ротором;
б) асинхронний двигун з фазним ротором;
в) багатошвидкісний асинхронний двигун;
г) асинхронний двигун з короткозамкненим ротором і тиристорним регулятором напруги (система ТРН-АД);
д) асинхронний двигун з короткозамкненим ротором і тиристорним перетворювачем частоти (система ТПЧ-АД).
Електроприводи постійного струму будуються на основі:
а) двигунів незалежного, послідовного і змішаного збудження з реостатним регулюванням швидкості та використанням спеціальних схем їх вмикання;
б) системи ТП-Д.
Для механізмів піднімання і переміщення талей і невідповідальних кранів регулювання швидкості не потрібно. В таких випадках використовується асинхронний двигун з короткозамкненим ротором. Щоб забезпечити плавний вибір люфтів в передачах, момент двигуна зменшують за рахунок увімкнення резисторів у коло статора.
Для більшості універсальних мостових і поворотних кранів достатній діапазон регулювання швидкості D = 23. В зв’язку з цим наймасовіше використання в кранах знайшли асинхронні двигуни з фазним ротором, швидкість яких регулюється зміною опорів резисторів в роторному колі. Але при цьому не можна забезпечити жорстких регулювальних характеристик для приводів піднімання при опусканні вантажів зі швидкістю, нижчою за синхронну. Тому в багатьох випадках регулювальні властивості такого привода не задовольняють вимогам і в режимі опускання вантажу вмикають двигун за схемою динамічного гальмування з самозбудженням.
Відповідна схема силового кола привода та його механічні характеристики показані на рис. 5.3. В режимі динамічного гальмування з самозбудженням контактор КІ вимкнений, а К2 - увімкнений. При цьому живлення обмотки статора здійснюється від роторного кола двигуна через випрямляч В. Увімкнені в коло ротора додаткові опори Rд використовуються як дільник напруги і дають змогу регулювати значення напруги /ЕРС/, що знімається з ротора двигуна і, відповідно, регулювати його швидкість обертання.
Для покращення умов самозбудження, крім кола самозбудження передбачають додаткове коло незалежного збудження двигуна від мережі змінного струму. Варіант такого кола показано на рис. 5.3,а пунктирними лініями (однопівперіодна схема випрямлення).
Найсприятливіші
для регулювання швидкості асинхронного
електропривода способи, що дають
змогу змінювати синхронну швидкість
двигуна. Тому в кранових приводах
широко використовуються багатошвидкісні
асинхронні двигуни з короткозамкненим
ротором, що мають на статорі дві або три
обмотки з різною кількістю пар полюсів.
Схема увімкнення
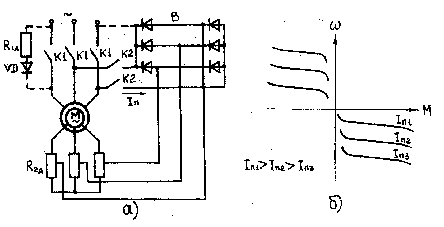
Рис. 5.3. Схема динамічного гальмування асинхронного
електропривода з самозбудженням (а) та його характеристики (б)
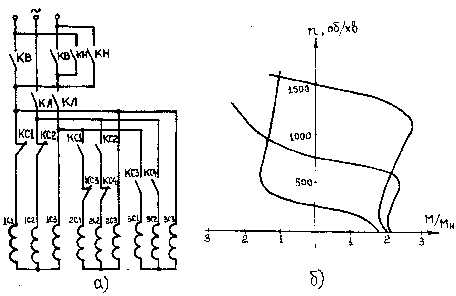
Рис. 5.4. Схема силового кола кранового електропривода
з трьох швидкісним асинхронним двигуном (а)
та його механічні характеристики (б)
обмоток такого двигуна показана на рис. 5.4,а. Особливістю схеми е перемикання трьох обмоток двигуна за допомогою чотирьох контакторів (КСІ-КС4). Для одержання першої швидкості піднімання вмикають контактори КВ і КЛ, для одержання другої - контактори КСІ і КС2. Увімкнення обмотки третьої швидкості ЗСІ, 3С2, ЗСЗ здійснюється вмиканням контакторів КСІ-КС4, Механічні характеристики такого привода показані на рис. 5.4,6, Вони мають високу жорсткість, як в режимі двигуна, так і в режимі генератора. Схема керування симетрична. Головним недоліком таких електроприводів є великі габарити і високий момент інерції багатошвидкісних двигунів.
Використання тиристорних регуляторів напруги дає можливість регулювати швидкість асинхронного електропривода як при підніманні, так і при опусканні вантажів. Однак зменшення напруги на статорі двигуна приводить до зменшення магнетного потоку, що при даному значенні моменту викликає збільшення струму, втрат, що виділяються у двигуні, і, відповідно, приводить до збільшення нагрівання двигуна. Враховуючи це, а також необхідність тахогенератора для одержання жорстких механічних характеристик двигуна, системи ТРН-АД в кранових електроприводах використовуються рідко.
Найдосконалішу систему змінного струму, ТПЧ-АД, доцільно використовувати для механізмів з високими вимогами до регулювання швидкості, моменту і продуктивності, в яких за умовами експлуатації необхідне встановлення асинхронних короткозамкнених двигунів. Ця система на даний час знаходиться у стадії впровадження і дослідної експлуатації.
В найважчих умовах роботи, зокрема в металургійному виробництві, в механізмах кранів широко використовуються електроприводи постійного струму з двигунами незалежного, змішаного чи послідовного збудження і з реостатним регулюванням. Вибір способу збудження двигунів визначається характером : навантажень і межами їх зміни.
Для піднімальних лебідок при роботі на піднімання доцільно використовувати двигун з послідовним збудженням. Його характеристика забезпечує значне збільшення швидкості при підніманні легких вантажів. Крім того, перевагою такого двигуна є більша перевантажувальна здатність, ніж двигунів іншого типу. Для механізмів переміщення кранів, що працюють в закритих приміщеннях і навантаження яких обумовлені тільки реактивними силами тертя, також використовується двигун послідовного збудження. В інших випадках використовують двигуни з жорсткішою механічною характеристикою змішаного або незалежного збудження.
Для розширення меж регулювання швидкості двигуна постійного струму використовується схема шунтування якоря. Схема шунтування якоря двигуна незалежного збудження і відповідні механічні характеристики показані на рис. 5.5. В електроприводах піднімальних лебідок з двигунами послідовного збудження регулювання швидкості при опусканні вантажів здійснюється за допомогою спеціальної схеми, що називають “схемою безпечного спуску” /рис. 5.6,а/. Механічні характеристики такої схеми наведені на рис. 5.6,б. З аналізу цих характеристик видно, що при генераторному режимі характеристики мають високу жорсткість, а в режимі двигуна їх форма забезпечує сприятливі умови обмеження пускового струму і моменту електропривода.
В найвідповідальніших випадках при високих вимогах щодо плавності перехідних процесів, а також точності регулювання швидкості використовується схема ТП-Д.
Для ручного управління електроприводами кранових механізмів використовуються силові та магнетні контролери. Контакти силового контролера розраховані на перемикання силових кіл електропривода і замикаються чи розмикаються залежно від положення рукоятки контролера.
При інтенсивному режимі роботи і значній потужності привода від ручного керування за
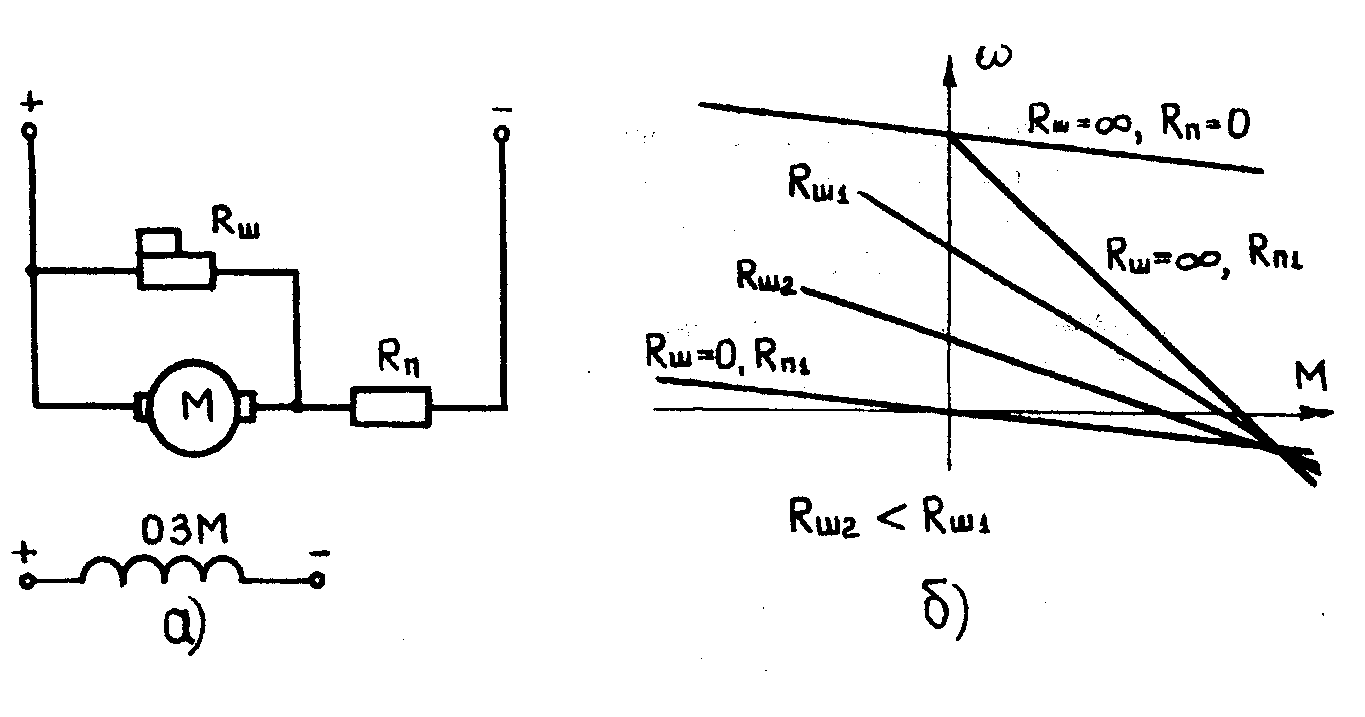
Рис.5.5. Схема шунтування якоря двигуна постійного струму незалежного збудження (а)
та її механічні характеристики (б)
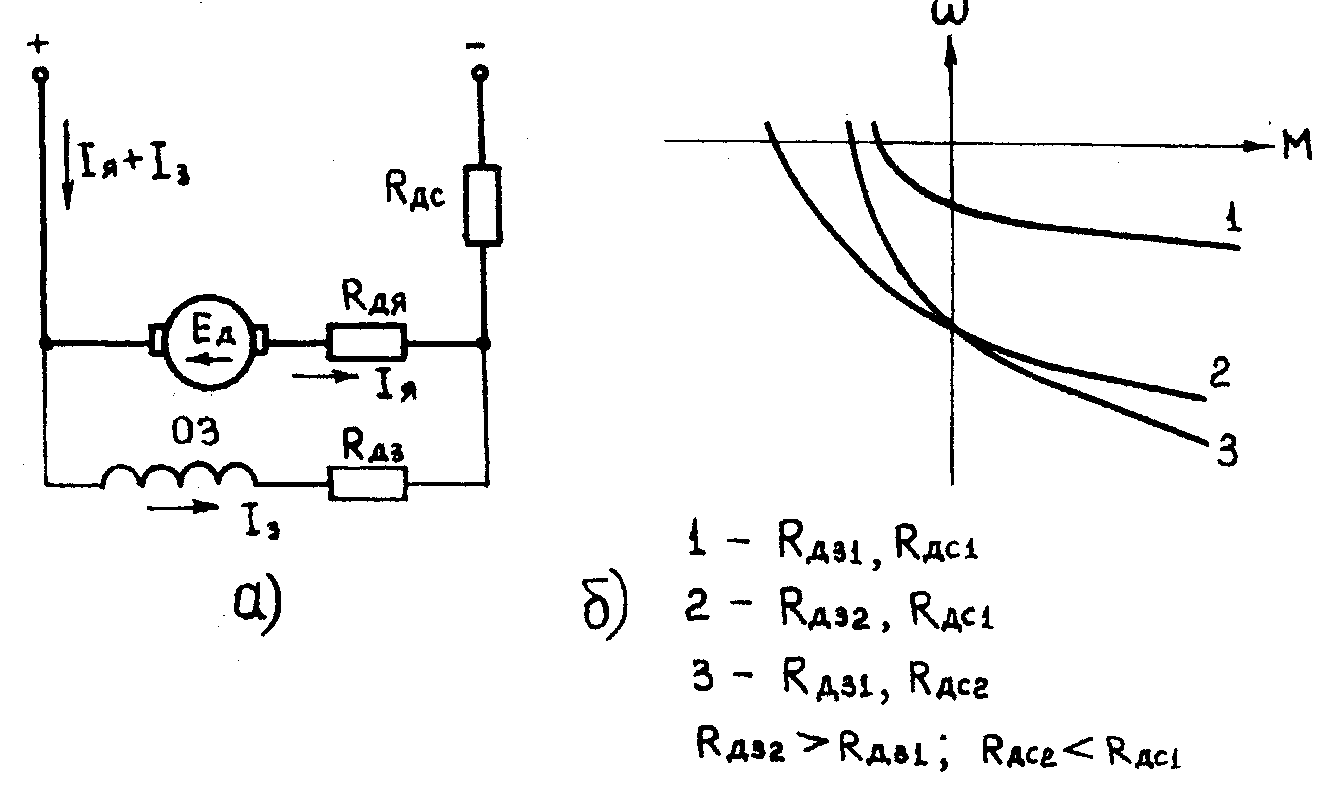
Рис.5.6. Схема безпечного опускання (а)
та її механічні характеристики (б)
допомогою силових контролерів доводиться відмовлятись, незважаючи на їх простоту. Відсутність автоматичного контролю за процесами пуску і гальмування не дає змоги зменшити тривалість перехідних процесів, а керування важким контролером вимагає від оператора значних зусиль. Крім цього, комутаційна здатність силового контролера обмежена. В таких випадках використовуються магнетні контролери, контакти командоконтролерів яких комутують не силові кола, а кола релейно-контакторної апаратури.
Правила безпеки ставлять до всіх схем керування крановими електроприводами ряд вимог: автоматичне обмеження ходу механізмів, блокування, що не допускає зіткнення двох кранів, які працюють на одних рейках, блокування, що автоматично вимикає напругу при відкриванні люка для виходу на міст крана і інші. Для цих автоматичних захистів служить захисна панель, що містить, як правило, загальний вимикач живлення крана, лінійний контактор, комплект максимальних реле, а також кнопку і пакетний вимикач для увімкнення і вимкнення кіл керування. Для кранів з двигунами змінного і постійного струму випускаються типові панелі керування.
Панелі керування призначені для механізмів переміщення і обертання відповідно до характеру навантажень цих електроприводів мають симетричні схеми, що забезпечують автоматизовані пуск та гальмування і реостатне регулювання швидкості. Специфіка кранових магнетних контролерів проявляється в панелях, що призначені для керування електроприводами механізмів піднімання. Відповідно до активного характеру навантаження цих електроприводів, їх схеми керування виконуються несиметричними, тобто одним і тим самим положенням контролера під час піднімання і опускання відповідають різні схеми увімкнення двигуна. Панелі керування крановими асинхронними двигунами можуть працювати або на змінному, або на постійному струмі, залежно від апаратури, яка в них використовується. Контактори змінного струму мають менші габарити, ніж контактори постійного струму, але допускають меншу кількість увімкнень за годину (менше 600 вкл/год). Контактори постійного струму допускають більшу кількість увімкнень і мають більшу надійність роботи внаслідок постійності тягового зусилля і незалежності опору котушки від стану магнетної системи. Тому у відповідальних випадках використовують апаратуру постійного струму.