

Розрахунок каскадної аср методом професора Ротача
Передавальні функції об'єкта керування за основним та допоміжним каналом мають вигляд:
![]()
Знаходимо АЧХ та ФЧХ основного та допоміжного каналів АЧХ - об'єкта:

ФЧХ - об'єкта:

Для системи з регуляторами типу П - ПІ за методом проф. Ротача справедливі співвідношення:
![]()
![]()
![]()

Рисунок 7.4 – ФЧХ розімкнутих систем
![]()

Рисунок 7.5 – Знаходження робочої частоти в системі
та амплітуд розімкнутих систем
![]() ,
,
знаходимо амплітуди розімкнутих систем
на робочій частоті за векторною діаграмою
,
,
знаходимо амплітуди розімкнутих систем
на робочій частоті за векторною діаграмою
![]()
![]()
Тоді налагодження регуляторів в каскадній системі буде таким:
П - внутрішній регулятор;
ПІ - зовнішній регулятор.

Метод параметричної оптимізації
Оскільки основні засади методу параметричної оптимізації та методика роботи в пакеті Matlab та Simulink розглянуті вище при розрахунках одноконтурних АСР, то використання даного підходу для визначення налаштування каскадних систем розглянемо безпосередньо на прикладі [13].
Приклад.
Необхідно знайти налаштування регуляторів
в каскадній АСР зі структурою типу П-ПІ
на КО з передавальними функціями за
основним каналом
![]() та допоміжним каналом
та допоміжним каналом
![]() .
.
Імітаційна структурна схема АСР в Simulink приведена на рис. 7.6. Початкове наближення параметрів налагодження:
kp1=1 ; kp2=1 ; Ti1=5.
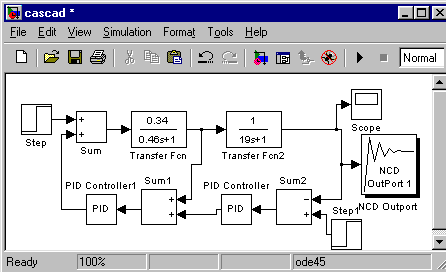
Рисунок 7.6 - Simulink - модель каскадної АСР

Рисунок 7.7 - Результати пошуку оптимального налагодження регуляторів з використанням блоку NCD
При налагодженні блоку параметричної оптимізації NCD задають параметри, які підлягають оптимізації, а саме kp2, Ti1 та kp1 (рис. 7.6), а також конструюється область бажаної поведінки системи при стрибкоподібному збуренні за завданням зовнішнього регулятора. Результати пошуку оптимального налагодження регуляторів в АСР відображені на рис. 7.7.
Оптимальне налаштування регуляторів:
kp1 = 1.2906e+001; kp2 = 9.6124e-001;
Ti1 = 2.0444e+000.
7.3 Порядок виконання роботи
1) За заданими викладачем динамічними властивостями об’єкта керування визначити параметри налаштування основного та допоміжного регуляторів для варіантів, заданих в таблиці 7.1
Таблиця 7.1 – Закони регулювання
-
Регулятор
Закон регулювання
основний
ПІ
ПІД
ПІ
ПІД
допоміжний
П
П
ПІ
ПІ
Розрахунок провести на ЕОМ.
2) За допомогою пакета програм ”SIAM” промоделювати каскадну систему керування і отримати криві перехідних процесів.
3) Визначити за кривими перехідних процесів якісні показники системи і вибрати для заданого об’єкта оптимальний закон керування.
7.4 Питання для самоконтролю
З якою метою використовують каскадно зв’язане регулювання?
Які функції основного і допоміжного регуляторів?
Назвати метод розрахунку каскадних систем.
Які закони регулювання використовують в основному та допоміжному каналах регулювання?
Як визначити критичну частоту?