

Порядок выполнения работы:
Изменяя угол ориентации оси чувствительности акселерометра при помощи поворотного стенда, получить статическую характеристику прибора. W = g * cosα, где α – угол между осью чувствительности акселерометра и направлением действия вектора ускорения свободного падения.
Опыт повторить 5 раз и обработать результаты измерений, используя метод наименьших квадратов.
Изобразить полученную статическую характеристику акселерометра.
Выполнить подключение к персональному компьютеру-серверу и принять данные об ускорении БПЛА.
На основании полученной статической характеристики акселерометра и данным о полете модели получить угловые эволюции летательного аппарата. Изобразить угловые отклонения БПЛА в виде графиков как функции времени.
Используя один из методов численного интегрирования, получить проекции векторов скорости и положения БПЛА на оси связанной с объектом системы координат. Полученные результаты изобразить в виде графиков.
Получить матрицу перехода из связанной в стартовую систему координат. Найти проекции вектора ускорения БПЛА на оси стартовой системы координат.
Индивидуальное задание
Решить задачу согласно варианту задания.
Известно, что летательный аппарат движется с ускорением w, которое действует вдоль оси ОХ связанной системы координат. Кроме этого, на него действует гравитационное ускорение g. Движение летательного аппарата происходит в течении 60,4 с, данные от измерительного блока поступают каждые 0,1 с. Измерительный блок включает в себя три акселерометра, оси чувствительности которых расположены вдоль осей связанной с летательным аппаратом системы координат. Взаимное расположение систем координат приведено на рис. 2.8.
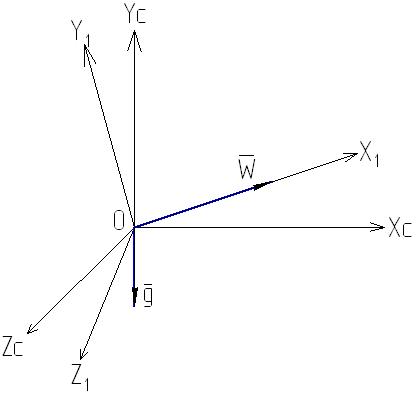
Рисунок 2.8 – Взаимное расположение связанной и стартовой
систем координат
В файле с исходными данными “Lr2_VarN.mat” (N – номер варианта) содержатся результаты измерения полного ускорения в связанной с летательным аппаратом системе координат (проекции wx, wy, wz), величина ускорения w относительно оси ОХ связанной с летательным аппаратом системы координат, углы ориентации связанной системы координат относительно стартовой (roll – угол крена, yaw – угол рыскания, pitch – угол тангажа) как функции времени t.
В момент времени t1 один из акселерометров перестал работать правильно. Определить, в какой момент времени это произошло и какой из трех датчиков отказал (wx, wy или wz).
Дать письменные ответы на вопросы:
Для каких целей применяется на ЛА акселерометр линейных ускорений?
Что измеряет акселерометр линейных ускорений?
Что такое перегрузка?
В чем состоит разница между абсолютным и кажущимся ускорением?
Что является чувствительным элементом акселерометра?
Термины для занесения в тезаурус
Поперечное управление самолета – управление по параметрам, определяющим движение самолета в горизонтальной плоскости XC OC ZC: боковой координате центра масс, угла рыскания и пути, а также угла крена.
Продольное управление самолетом – управление по параметрам, определяющим движение самолета в вертикальной плоскости XC OC YC: продольной и вертикальной (высота) координатам центра масс, угла тангажа, наклона траектории к атаке.
Пропульсивная сила – сила, приводящая в движение самолет (аэродинамическая или реактивная).
Штопор – крутое снижение самолета по винтовой траектории с одновременным вращением вокруг своей продольной оси по причине авторотации крыла на больших углах атаки.
Лабораторная работа № 2