

13. Режимы работы системы эп унв-дпт
Т.к. в системе ЭП НУВ-ДПТ сущ. РПТ, то для ЭМ и М хар-ки будут представляться выражениями.
 ;
М=кФ·Iя.ср=Се·Iя.ср;
;
М=кФ·Iя.ср=Се·Iя.ср;
 ;
;
RФ(IЯ.СР) – фиктивное R выпрямителя, учитывающая преривистый режим работы в системе. Это R зависит от угла откр. α, пар-ров ЯЦ, интервала проводимости λ
 или
или

 -
для 1ФазМВ
-
для 1ФазМВ  - 3Фаз МВ
- 3Фаз МВ
 для
3фаз МВ с трансф-ным питанием
для
3фаз МВ с трансф-ным питанием
 для 3фаз НВ. Из выражений характеристик
для РПТ следует, что скорость ХХ двигателя
неоднозначно зависит от отстования
угла альфа, и будет выше, чем скорость
ХХ в РНТ при том же угле альфа в следствии
неоднозначности зависимоти скорости
в РПТ системаЭП в РПТ теряет свою
управляемость, в том смысле, что скорость
двигателя не зависит от альфа, а в
различных степенях определяется
нагрузкой двигателя. Следовательно ЭП
УНВ-ДПТ может функционировать лишь с
обратной связью по скорости либо с обр
связью по параметру адекватности
скорости
для 3фаз НВ. Из выражений характеристик
для РПТ следует, что скорость ХХ двигателя
неоднозначно зависит от отстования
угла альфа, и будет выше, чем скорость
ХХ в РНТ при том же угле альфа в следствии
неоднозначности зависимоти скорости
в РПТ системаЭП в РПТ теряет свою
управляемость, в том смысле, что скорость
двигателя не зависит от альфа, а в
различных степенях определяется
нагрузкой двигателя. Следовательно ЭП
УНВ-ДПТ может функционировать лишь с
обратной связью по скорости либо с обр
связью по параметру адекватности
скорости
Так как выпрямитель не реверсивный, то обеспечивается лишь двигательный режим работы, если момент механизма несет реактивный характер.
Двигатель работы обеспечивается только в первом квадранте
Если момент двигателя носит активный характер, то система ЭП может также обеспечивать режим торможения двигателя противовключением при альфа=90, а так же режим рекуперативного движения с отдачей энергии в сеть через выпрямитель при альфа меньшем 90.
В данной системе ЭП невозможно изменить направление протекания тока в цепи якоря из-за однонаправленного действия теристоров .
В данной системе при реактивном действии осуществляется определенные виды работ:
-управляющий пуск двигателя на требуемой скорости
-регулировка скорости двигателя
Без переключения в схеме нельзя обеспечить электрическое торможение, торможение механизма возможно лишь за счет тормозящего действия момента сопростивления
14. Электромагнитные процессы в якорной цепи двигателя системы электропривода "нереверсивный полууправляемый выпрямитель - двигатель постоянного тока".
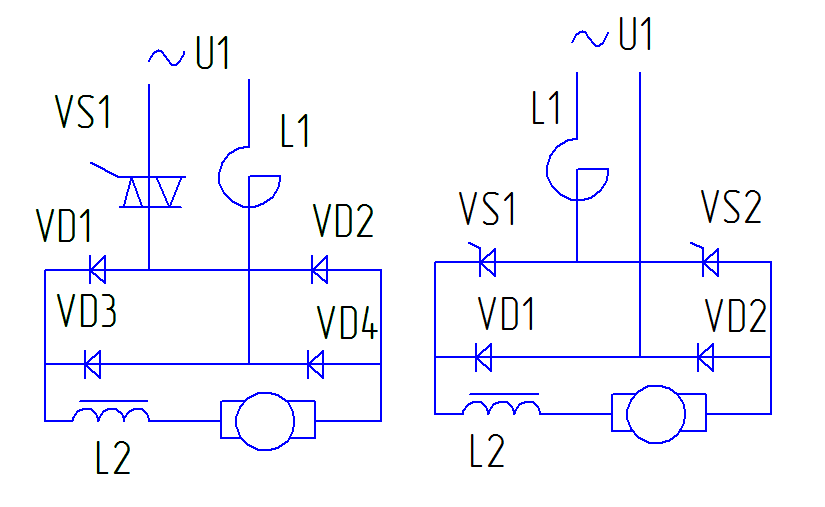
В схеме с симистором регулирование происходтит на стороне переменного тока симистором VS1. Диодный мост осуществляет лишь выпрямление.
Во второй схеме ругулирующими элементами являются тиристоры VS1-VS2
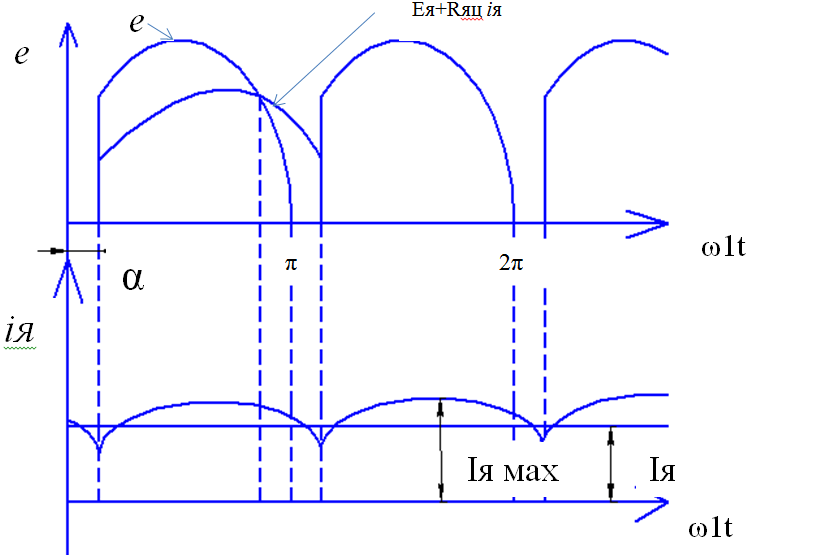
Вследствие наличия диодов шунтирующих якорную цепь в кривой выпрямленного напряженя отсутствуют участки отрицательной полярности
15. Характеристика управления полууправляемого выпрямителя в режиме непрерывного тока. Минимальный граничный угол открывания. Начальный угол открывания. Максимальный угол открывания.

Зависимость
постоянной составляющей ЭДС от угла
α называется характеристикой управления

 для
однофазных выпрямителей
для
однофазных выпрямителей
 3хфазный
мостовой полууправляемый
3хфазный
мостовой полууправляемый
Граничный
угол
 можно определить как и для управляемых
схем.
можно определить как и для управляемых
схем.
Из
кривой ЭДС выпрямителя видно, что Е=0
при угле
 ,
однако по условию безаварийной работы
выпрямителя
,
однако по условию безаварийной работы
выпрямителя

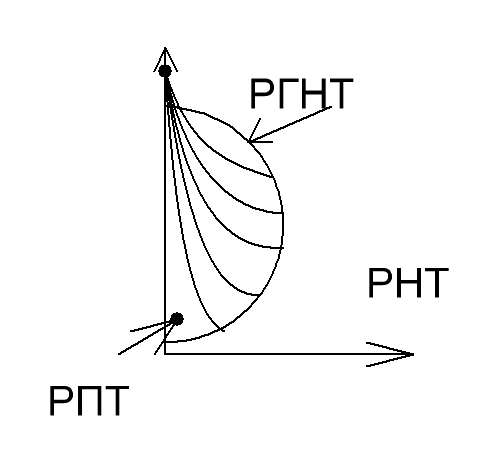
16. Электромеханические и механические характеристики системы электропривода "полууправляемый выпрямитель - двигатель постоянного тока".
Рассмотрим характеристики для РНТ.


 ;
;
Г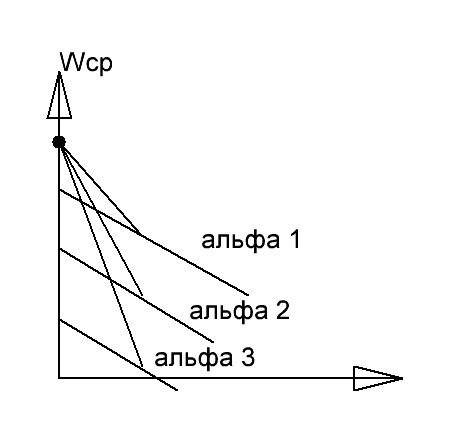 раница
РГНТ определяется по формуле:
раница
РГНТ определяется по формуле:
 ,
где
,
где - фазовый угол, определяемый параметрами
схемы.
- фазовый угол, определяемый параметрами
схемы.
Как и для управляемого выпрямителя в данном случае характеристика эл.мех. и мех. в РПТ не линейна, поэтому по приведенным формулам определяются точки пересечения характеристик для РНТ и эти точки соединяются с точками ω0 для соответствующих углов α. В следствии наличия РПТ, который обусловлен пульсирующим характером выходного напряжения, скорость двигателя возрастает, т.е. в РПТ выпрямитель теряет свою управляемость и для обеспечения работы необходимо ввести связь по скорости или ЭДС якоря. Из-за наличия в схеме шунтирующих диодов данная система ЭП может работать лишь в двигательном режиме.