

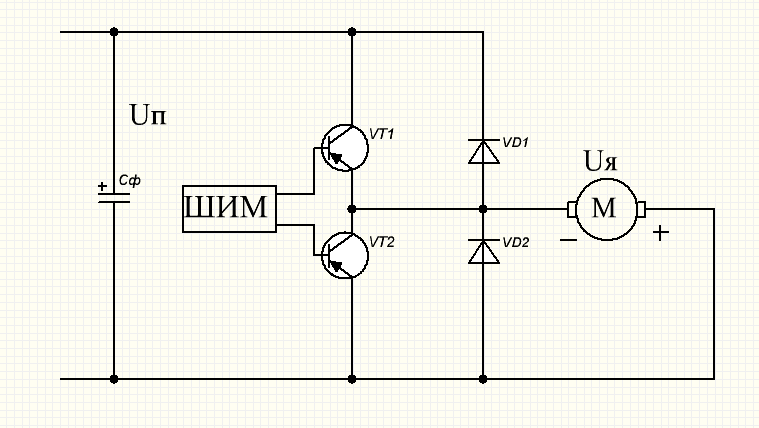
32. Электромагнитные процессы в якорной цепи двигателя системы электропривода "полумостовой пшиу - дпт".
 Полумостовая
схема ПШИУ состоит из 2 преобразователей:
одноключевого VT1,VD2(последовательный
понижающий), и паралельный VT2,
VD1-повышайщий.
Полумостовая
схема ПШИУ состоит из 2 преобразователей:
одноключевого VT1,VD2(последовательный
понижающий), и паралельный VT2,
VD1-повышайщий.
В полумостовой схеме ток может протекать по якорю в двух направлениях, поэтому РПТ исключен.
Схема может работать в двух режимах:
-однополярный ток
Импульсы подаются в противофазе на оба транзистора

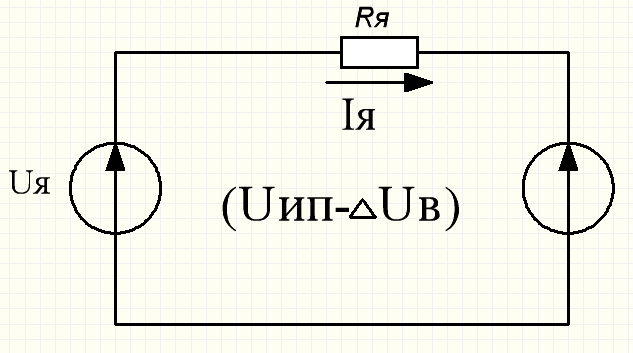
С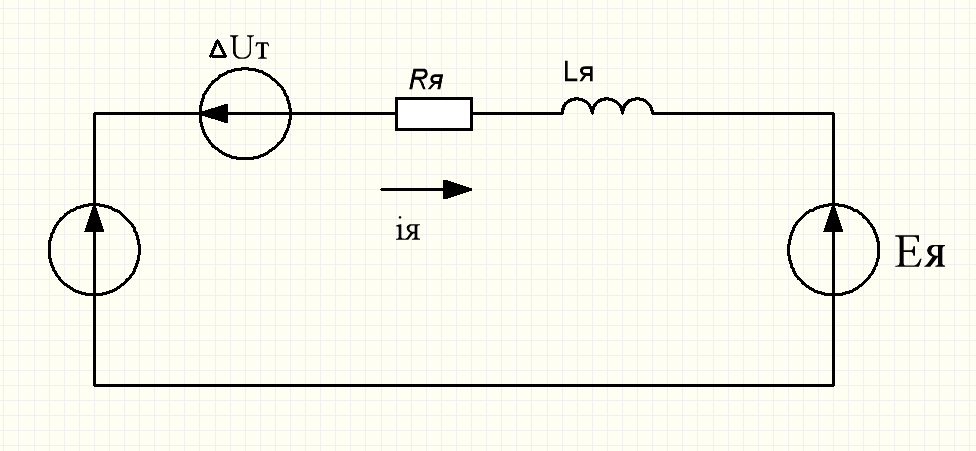 хема
замещения
хема
замещения

При

-двухполярный ток
Если
на участках , периода коммутации
 ток iя
спадает до нуля, то наступает режим двух
полярного тока.
ток iя
спадает до нуля, то наступает режим двух
полярного тока.
33. Электромеханические характеристики двигателя постоянного тока в системе электропривода "нереверсивный одноключевой пшиу - дпт".

Данная система может работать в режиме непрерывного и прерывистого тока.


 НТ:
НТ:
Для РПТ хар-ки записываются:
Фиктивное сопротивление Rф учитывает РПТ Широтно-импульсного преобразователя. Вследствие того, что Rф является нелинейной функцией тока якоря, хар-ки в РПТ описываются нелинейной кривой. Для упрощенного построения хар-ки в РПТ, заменим нелинейные участки линейными.
Гранично непрерывный ток:

Построение хар-ки а РПТ осуществляется следующим образом:
Строим хпр-ки для РНТ для определения значений
 .
.Определяем для каждой хар-ки ток Iя.гр. о отмечаем точку пересечения данного тока с соответствующей хар-кой.
Определяем скорость холостого хода, которая для всех хар-к в РНТ одна и та же:

Ч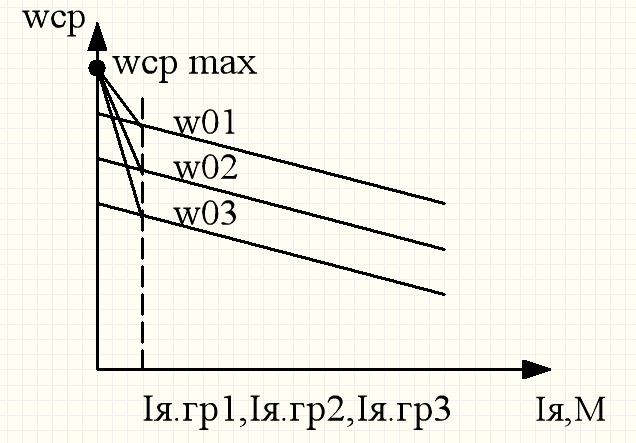 ем
меньше период коммутации Tк,
тем меньше будет значение тока Iя.гр.
Т.о. можно добиться ограничения зоны
прерывистого тока на уровне не прерывающем
ток холостого хода и исключен таким
образом РПТ. Чем выше частота тем выше
Iя.гр.
ем
меньше период коммутации Tк,
тем меньше будет значение тока Iя.гр.
Т.о. можно добиться ограничения зоны
прерывистого тока на уровне не прерывающем
ток холостого хода и исключен таким
образом РПТ. Чем выше частота тем выше
Iя.гр.

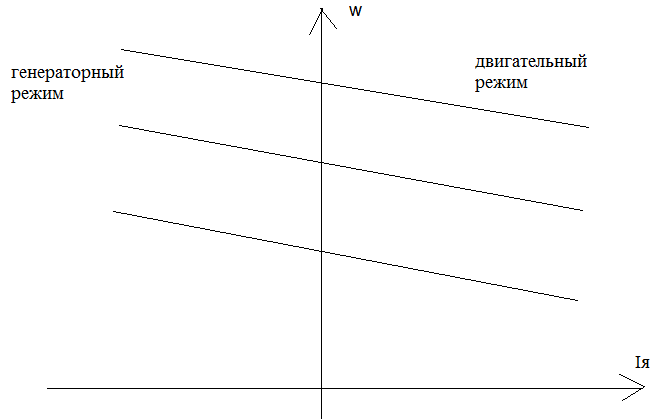
34. Электромеханические хар-ки эд в системе эп «полумостовой пшиу – дпт»
В системе отсутствует РПТ, хар-ки опис-я одним выр-м для двиг.режима и одним для тормозного.
Двигательный режим:
 электромех.ха-ка
электромех.ха-ка
 мех.хар-ка
мех.хар-ка
Тормозной режим:
 электромех.ха-ка
электромех.ха-ка
 мех.хар-ка
мех.хар-ка
Для перевода ЭД в режим торможения необходимо уменьшить скажность импульсов. Полумостовой ПШИУ позволяет обеспечить работу ЭД в 1-м квадранте в двигательном режиме и во 2-м – в тормозном режиме. Недостатком является невозможность реверсирования ЭД без применения реверсора.
35. Электромагнитные процессы в якорной цепи двигателя системы электропривода «реверсивный пшиу – дпт» с несимметричной коммутацией.
П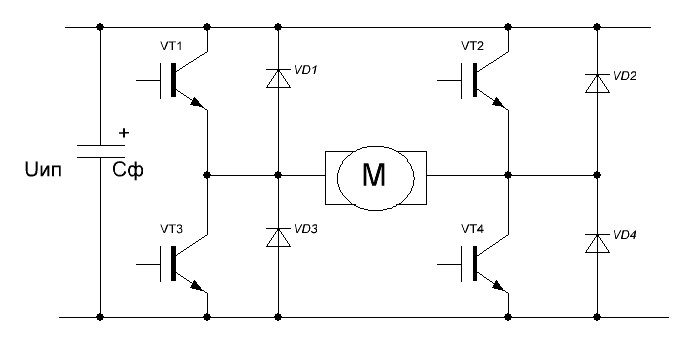
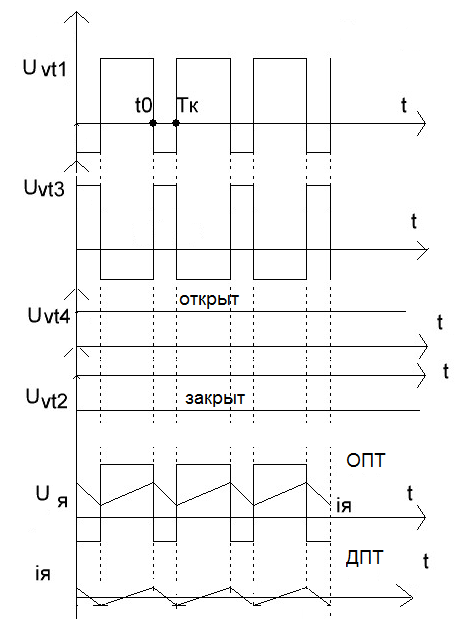 ри
несим коммутации в схеме работают три
транзистора из четырех: два коммутируются
в противофазе (VT1,
VT3),
один полностью открыт (VT4),
один полность закрыт (VT2).
Ток может протекать по якорю в двух
направлениях, поэтому РПТ исключается.
Схема может работать в режимах ОПТ и
ДПТ. При необходимости реверсирования
путем подачи о. импульсов на транзисторы
VT2,
VT4,
VT3
по соотв.алгоритму собирается схема
позв-я протекать току в обратном
направлении. В рез.несим.комутации на
якоре формируется последовательность
прямоугольных импульсов: Uп=(U-2∆U)γ.
ри
несим коммутации в схеме работают три
транзистора из четырех: два коммутируются
в противофазе (VT1,
VT3),
один полностью открыт (VT4),
один полность закрыт (VT2).
Ток может протекать по якорю в двух
направлениях, поэтому РПТ исключается.
Схема может работать в режимах ОПТ и
ДПТ. При необходимости реверсирования
путем подачи о. импульсов на транзисторы
VT2,
VT4,
VT3
по соотв.алгоритму собирается схема
позв-я протекать току в обратном
направлении. В рез.несим.комутации на
якоре формируется последовательность
прямоугольных импульсов: Uп=(U-2∆U)γ.
Э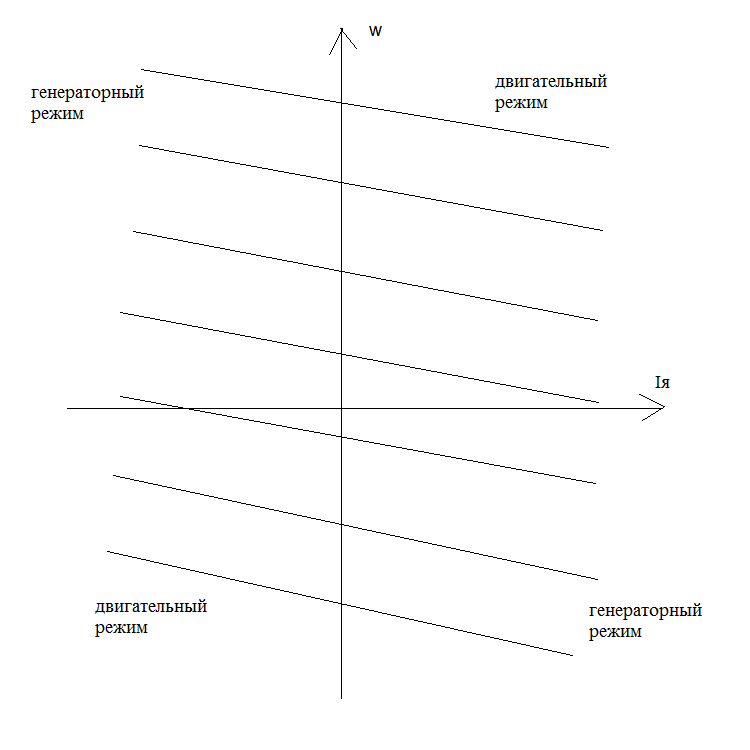 лектромех.
хар-ки:
лектромех.
хар-ки:
 ;(«+»-торм.реж;«-»-двиг.реж.).
;(«+»-торм.реж;«-»-двиг.реж.).