

8. Характеристика управления вентильного комплекта управляемого выпрямителя в режиме непрерывного тока. Минимальный граничный угол открывания.
 характеристика
управления вентильного комплекта
управляемого выпрямителя справедливо,
если
характеристика
управления вентильного комплекта
управляемого выпрямителя справедливо,
если

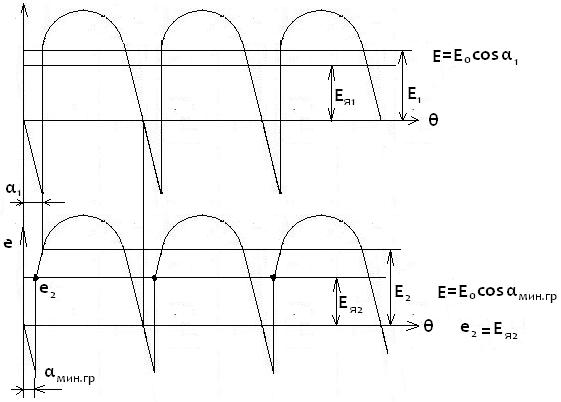
В процессе работы ЭП для увеличения выходного напряжения выпрямителя (увел. скорости двигателя) уменьшают угол α, при этом мгновенное значение ЭДС выпрямленное E соответствующее углу α, при его уменьшении, уменьшается, при этом увеличивается среднее значение выпрямленного напряжения, скорость двигателя и ЭДС якоря (Eя).
При
некотором значении угла открывания
 , мгновенное значение ЭДС (e)
станет равным Eя.
, мгновенное значение ЭДС (e)
станет равным Eя.
Дальнейшее
уменьшение угла
 не позволит открыться вступающим в
работу тиристорам, т.к. они будут находится
в момент подачи открывающих импульсов
под обратным напряжением.
не позволит открыться вступающим в
работу тиристорам, т.к. они будут находится
в момент подачи открывающих импульсов
под обратным напряжением.
Э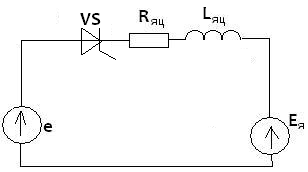 то
влечет за собой невозможность открывания
вступающих в работу тиристоров и как
следствие пропуск пульсов выпрямленного
напряжения (аварийный режим работы).
то
влечет за собой невозможность открывания
вступающих в работу тиристоров и как
следствие пропуск пульсов выпрямленного
напряжения (аварийный режим работы).
Исходя
из условия e=Eя
определим угол
 для однофазной мостовой схемы.
для однофазной мостовой схемы.
Мгновенное значение ЭДС при :

 -
при отсутствии тока в цепи.
-
при отсутствии тока в цепи.



Максимальное
значение выпрямленной ЭДС в системе
электропривода «выпрямитель ДПТ»:

9. Режимы работы системы эп «оув-дпт» при гранично-непрерывном токе.
ГНР хар-тся тем, что ток якоря сниж-тся до 0, но не прерывается, т.е. ток в начале каждого интервала проводимоти=0. Также ГНР хар-тся уменьшенным запасом энергии в эл.магнитном поле индуктивности,которой недостаточно для обеспечения режима непрерывного тока
Для начала интервала при ГНТ когда IЯ=0 можно записать

За начало отсчета t принимаем время, соотв.углуα
Из последнего выражения проинтегрировав его, получим ток якоря
Пренебрегая падением напряжения на активных сопротивлениях якорной цепи в режиме прерывистого тока можно получить среднее значение гранично непрерывного тока якоря:
 Макс.знач-е
ГН тока соотв. угол α=900=>
Макс.знач-е
ГН тока соотв. угол α=900=>
Разделив (1) на (2)и возведя в квадрат получим
 и
и
Последнее выражение описывает эллипс с
полуосями Е=Е0 и IЯ.ГР.= IЯ.ГР.МАКС
Каждая точка этой кривой подчиняется з-ну
10. Электромагнитные процессы в яц двигателя системы «оув-дпт» в рпт. Начальный угол открывания. Максимальный угол открывания.
РПТ возникает, если энергии, накопленной в якорной цепи недостаточно для создания дополнительного ЭДС самоиндукции на участке

Т
 о
ток в якоре спадает до 0 и прерывается,
т.е. наступает РПТ
о
ток в якоре спадает до 0 и прерывается,
т.е. наступает РПТ
Как правило режим работы с прерывистым током наступает при углах открытия α близких к 900 и малом токе якоря. Такие условия обуславливают малый запас электромагн. энергии в индуктивности, что не позволяет поддерживать ток в якоре на участках, когда ЭДС якоря ЕЯ>e. На интервалах отсутствия токов в кривой ЭДС появляется ступенька=по величие ЕЯ.Если конечная скорость не равна 0, то протекает ток в ОбмВозб.
 Для
РПТ хар-ка упр-ния вентил. комплекта
будет иметь вид
Для
РПТ хар-ка упр-ния вентил. комплекта
будет иметь вид Т.к.
интервал проводимости λ зависит в РПТ
от угла α и величины тока якоря, а также
индуктивности якорной цепи. Представить
аналитическим выражением хар-ки упр-ния
ВК для РПТ невозможно, т.к. отриц. участок
в кривой ЭДС в РПТ меньше (вообще
отсутствует) чем в РНТ, то сред.знач. Е
для РПТ больше, чем для РПТ при одном и
том же угле α.
Т.к.
интервал проводимости λ зависит в РПТ
от угла α и величины тока якоря, а также
индуктивности якорной цепи. Представить
аналитическим выражением хар-ки упр-ния
ВК для РПТ невозможно, т.к. отриц. участок
в кривой ЭДС в РПТ меньше (вообще
отсутствует) чем в РНТ, то сред.знач. Е
для РПТ больше, чем для РПТ при одном и
том же угле α.
Т.к. система ЭП УВ-ДПТ при углах α близких к 900
и больше может работать только в РПТ, то в этом
случае справедлива хар-ка упр-ния ВК для РПТ.
Из хар-ки упр-ния видно, что Е для РПТ будет =0

лишь при α=1800
Однако из-за возможности аварийного режима установить α на уровне 1800 невозможно. Поэтому αНАЧ для НУВ уст-тся на уровне αМАКС =(1600 …1700). Очевидно, что при таком α Е≠0, но из-за малости ЭДС при αМАКС данный угол опр-тся как αНАЧ для РПТ. Необходимо отметить, что αНАЧ=αМАКС должен быть таким, чтобы U на якоре двигателя не вызывала протекания такого тока в якоре, способного создать момент, превышающий момент ХХ машины.
11-12. Электромех и мех хар-ки системы ЭП «НУВ-ДПТ» в РНТ
Электро-механической
характеристикой системы ЭП наз.
зависимость
 при пост. значении угла α.
при пост. значении угла α.
 ;
; ;
E-nΔUT-Eя=RяцIяц
;
E-nΔUT-Eя=RяцIяц
E 0cosα-Eя=
RяцIяц
; при nΔUT=0
Ея=Се·ωср
; Се=КФω;
0cosα-Eя=
RяцIяц
; при nΔUT=0
Ея=Се·ωср
; Се=КФω;
 ;
ωср=ω0-Δω;
;
ωср=ω0-Δω;
 ;
;
 ;
Из уравнений видно изменяя угол открывания
α регулируем угловую скорость ХХ
двигателя. Из электро-механической
характеристики получим механическую:
М=кФ·Iя.ср=Се·Iя.ср;
;
Из уравнений видно изменяя угол открывания
α регулируем угловую скорость ХХ
двигателя. Из электро-механической
характеристики получим механическую:
М=кФ·Iя.ср=Се·Iя.ср;
 ;
Т.к. в системе ЭП НУВ-ДПТ сущ. РПТ, то для
ЭМ и М хар-ки будут представляться
выражениями, отличных от рассмотренных.
;
Т.к. в системе ЭП НУВ-ДПТ сущ. РПТ, то для
ЭМ и М хар-ки будут представляться
выражениями, отличных от рассмотренных.
 ;
М=кФ·Iя.ср=Се·Iя.ср;
;
М=кФ·Iя.ср=Се·Iя.ср; RФ(IЯ.СР)
– фиктивное R выпрямителя, учитывающая
преривистый режим работы в системе. Это
R зависит от угла откр. α, пар-ров ЯЦ,
интервала проводимости λ
RФ(IЯ.СР)
– фиктивное R выпрямителя, учитывающая
преривистый режим работы в системе. Это
R зависит от угла откр. α, пар-ров ЯЦ,
интервала проводимости λ
 или
или

 -
для 1ФазМВ
-
для 1ФазМВ  - 3Фаз МВ
- 3Фаз МВ

 для
3фаз МВ с трансф-ным питанием
для
3фаз МВ с трансф-ным питанием
 для 3фаз НВ
для 3фаз НВ
Из ф-л видно, что скорость ХХ не опр-тся углом открывания α как РНТ. Для РПТ отсутствует управляющее воздействие в виде угла α По цепи якоря будет протекать динамическая сост. тока, которая обеспеч-ет разгон дв. (или торм-е). В данном случае полож-ый ток дв.создает М дв., что приводит к увелич-ю скорости и Е якоря. При протекании данного тока и увел-я скорости будет продолжаться, пока Е якоря не станет =ЕМАКС. Ток прекратится, а скорость достигнет макс возможной.
Таким образом при углах α<π/m’ скорость ХХ не зависит от угла откр-я α. При углах α>π/m’ опр-тся углом α и мгнвенным зная-ем ЭДС, соотв. этому углу
 !
из графиков видно, что ЭМ и М ! хар-ки в
зоне РПТ имеют нелин
!
из графиков видно, что ЭМ и М ! хар-ки в
зоне РПТ имеют нелин
ω01…ω03 – скорость ! хар-р,что обусловлено нелин-тью RФ ХХ для РНТ
 Для
упрощенного построения части хар-ки
необходимо:
Для
упрощенного построения части хар-ки
необходимо:
Построить требуемые хар-ки для заданных углов α для РНТ
Опред-ть значение гранично-непрерывного тока и соотв-щие этому току моменты для заданнных углов α
3). Соединить полученные точки прямой (?) линией с точками ωмакс