

4 1. Датчик тока на основе элемента Холла.
Элемент Холла представляет собой полупроводниковую пластину, которая будучи помещённой в магнитное поле генерирует ЭДС на двух гранях, называемую ЭДС Холла.
Через две грани элемента Холла
Пропускается постоянный ток Iх, а с двух других граней снимается ЭДС Холла, пропорциональная магнитной индукции В. В современном электроприводе в большинстве случаев в качестве датчиков тока используются датчики на основе элемента Холла.
Д
 атчик
состоит из элемента Холла 4, размещённого
в зазоре сердечника 1. В окно сердечника
пропускается проводник 2,по которому
протекает ток i. По двум граням пластины
пропускается ток iх, кот. Стабилизирован
на определённом уровне. С двух других
граней снимается ЭДС Холла. Протекающий
по проводнику 2 ток i создаёт в сердечнике
магнитное поле с индукцией В. Магнитное
поле воздействует на элемент 4 и вызывает
в нём ЭДС Холла, которая поступает на
усилитель 3 и усиливается.
атчик
состоит из элемента Холла 4, размещённого
в зазоре сердечника 1. В окно сердечника
пропускается проводник 2,по которому
протекает ток i. По двум граням пластины
пропускается ток iх, кот. Стабилизирован
на определённом уровне. С двух других
граней снимается ЭДС Холла. Протекающий
по проводнику 2 ток i создаёт в сердечнике
магнитное поле с индукцией В. Магнитное
поле воздействует на элемент 4 и вызывает
в нём ЭДС Холла, которая поступает на
усилитель 3 и усиливается.

 Коэф.
Коэф.
 явл-ся переменной величиной.
явл-ся переменной величиной.
Д ля
того, чтобы датчик тока был линейным,
используют начальную область кривой
намагничивания, а так же выполняют
датчик тока компенсационного типа (с
обратной связью), обеспечивающий
линейность характеристики управления
датчика, поэтому считая
постоянной
величиной можно записать:
ля
того, чтобы датчик тока был линейным,
используют начальную область кривой
намагничивания, а так же выполняют
датчик тока компенсационного типа (с
обратной связью), обеспечивающий
линейность характеристики управления
датчика, поэтому считая
постоянной
величиной можно записать:

Д анная
хар-ка характеризует датчик тока с
двухполярным питанием.
анная
хар-ка характеризует датчик тока с
двухполярным питанием.
С овременные
системы управления с микропроцессорным
управлением используют однополярное
питание. В электроприводе применяют
датчики тока с однополярным питанием.
В таких датчиках выходной сигнал лишь
одной полярности, что достигается
смещением характеристики управления
по оси
овременные
системы управления с микропроцессорным
управлением используют однополярное
питание. В электроприводе применяют
датчики тока с однополярным питанием.
В таких датчиках выходной сигнал лишь
одной полярности, что достигается
смещением характеристики управления
по оси

 Достоинствами
датчика тока являются: нет необходимости
в устройстве гальванической развязки,
высокое быстродействие, отвечающее
требованиям современного быстродействующего
ЭП, высокая точность.
Достоинствами
датчика тока являются: нет необходимости
в устройстве гальванической развязки,
высокое быстродействие, отвечающее
требованиям современного быстродействующего
ЭП, высокая точность.
42. Датчик тока на основе сглаживающего дросселя.
В полууправляемых выпрямителях часть тока якоря протекает по шунтирующим диодам, минуя питающую сеть. Одним из способов измерения тока якоря в таких системах ЭП является использование сглаживающего дросселя с дополнительной обмоткой.
Для измерения тока сглаживающий дроссель выполняют двухообмоточным: с силовой обмоткой L2.1 и измерительной (компенсационной ) обмоткой L2.2.

 ,
, - индуктивности силовой и компенсационной
обмоток.
- индуктивности силовой и компенсационной
обмоток.
 ,
, - коэффициенты взаимоиндукции.
- коэффициенты взаимоиндукции.
 ,
, -
активное сопротивление обмоток.
-
активное сопротивление обмоток.
Сглаживающий дроссель выполняют т.о. чтобы выполнялось равенство:




 т.к.
т.к.



Умножим
правую и левую часть на
 :
:


 Недостатками
данного датчика являются: отсутствие
гальвонической развязки между силовой
цепью и системой управления и невозможность
использования датчика тока для устройства
электронной защиты.
Недостатками
данного датчика являются: отсутствие
гальвонической развязки между силовой
цепью и системой управления и невозможность
использования датчика тока для устройства
электронной защиты.
43.Датчик тока на основе шунта
Простейшим первичным преобразователем тока является шунт.
Ш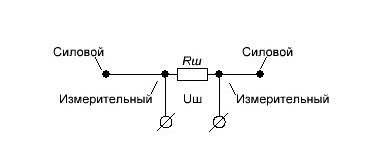 унт
представляет собой : безындуктивный
четырёхзажимный резистор; 2 зажима –
силовые,2 зажима – измерительные.
унт
представляет собой : безындуктивный
четырёхзажимный резистор; 2 зажима –
силовые,2 зажима – измерительные.
Разделение силовых и измерит. зажимов необходимо для того, что бы исключить ошибку измерительного тока из-за падения напряжения на силовых зажимах. Для исключ. ошибки от влияния на измерение ЭДС самоиндукции шунт должен быть безиндуктивным.
Если
Lш
 0,
0,



В качестве шунтов в ЭП малой мощности, особенно бытовом ЭП исп-ся низкоомные безиндуктивные резисторы. Стандартное падение напряжения на шунте равно 75В.

Характеристика управления
Д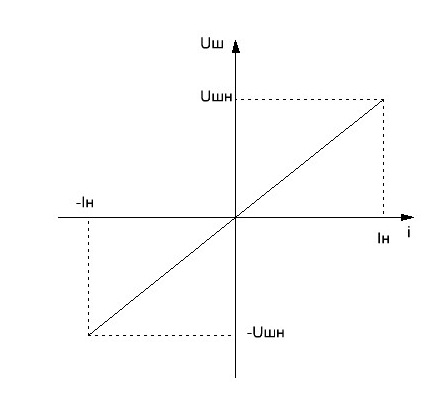 остоинства:
простота, несли нет необходимости в
гальванической развязке, низкая
стоимость.
остоинства:
простота, несли нет необходимости в
гальванической развязке, низкая
стоимость.
Недостаток: необходимость в обоснованных случаях гальванической развязки.