

14. Состав и назначение регистров специальных функций в микроконтроллерах.
Регистры специалных функций – это служебные регистры, расположенные внутри микропроцессора. Они предназначены для различных функций управления его работой и индикации состояния его составных частей. Их состав и организация зависят от конкретной архитектуры процессора и различаются в каждом конкретном случае. Наиболее часто встречающимися регистрами специальных функций являются “программный счетчик” PC (Program Counter), “указатель стека” SP (Stack Pointer) и “слово состояния программы” PSW (Program Status Word). Программный счетчик PC в каждый конкретный момент времени содержит адрес команды, следующей в CSEG за той, которая в данный момент выполняется. Указатель стека SP хранит текущий адрес вершины стека. Слово состояния программы PSW содержит набор текущих признаков результата выполнения операции. С каждым признаком результата связывается одноразрядная переменная-флажок, соответствующая определенному биту PSW.
В блоке регистров специальных функций есть два регистра, предназначенных для управления режимом прерываний и уровнями приоритета, имеющих символические имена IE - регистр масок прерывания (РМП) и IP - регистр приоритетов прерываний.
Список регистров специальных функций (на примере MCS - 51):
ACC – Аккумулятор
B - Регистр-расширитель аккумулятора
PSW - Слово состояния программы
SP - Регистр-указатель стека
DPTR - Регистр-указатель данных
P0…P3 – Порт 0…Порт 3
IP - Регистр приоритетов
IE - Регистр маски прерываний
TMOD - Регистр режима таймера/счетчика
TCON - Регистр управления/статус таймера
TH0 - Таймер 0 (старший байт)
TL0 - Таймер 0 (младший байт)
TH1 - Таймер 1 (старший байт)
TL1 - Таймер 1 (младший байт)
SCON - Регистр управления приемопередатчиком
SBUF - Буфер приемопередатчика
PCON - Регистр управления мощностью
RAR – Регистр адреса (программно недоступен)
PC – Счетчик команд
15. AVR - микроконтроллеры. Архитектура и назначение устройств.
Обобщенная архитектура:
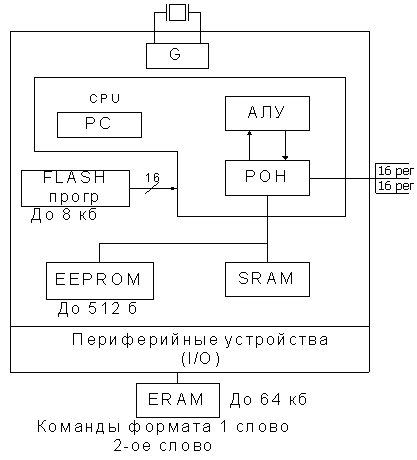
G – генератор. Настройка RC – генератора происходит в самом МП. АЛУ и РОН имеют по 8 разрядов. Память выполнена по Гарвардской архитектуре.
Память программ предназначена для хранения команд, управляющих функционированием МК. В памяти программ также хранятся различные константы, не меняющиеся во время работы программы. Память программ представляет собой электрически стираемое ППЗУ (FLASH-ПЗУ). Для адресации используется счетчик команд.
П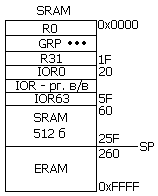 амять
данных разделена на три части: регистровая
память, оперативная память (статическое
ОЗУ) и энергонезависимое EEPROM.
Регистровая память включает в себя 32
РОНа (32 байта) и служебные регистры ВВ
(64 байта). В области регистров ВВ
расположены различные служебные регистры
(регистр указатель стека, регистр
состояния и др.), а также регистры
управления ПУ, входящими в состав МК.
Для хранения переменных программ вместе
с регистрами также может использоваться
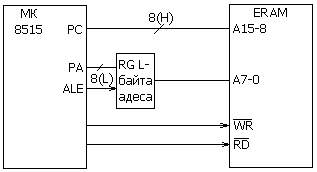
статическое ОЗУ. Есть возможность
подключения внешнего статического ОЗУ
объемом до 64 Кбайт. Для хранения данных,
которые могут изменяться в процессе
настройки и функционирования готовой
системы (калибровочные константы,
серийные номера, ключи и т. п.), может
быть использована EEPROM.
Эта память расположена в отдельном
адресном пространстве, а доступ к ней
осуществляется с помощью определенных
РВВ.
амять
данных разделена на три части: регистровая
память, оперативная память (статическое
ОЗУ) и энергонезависимое EEPROM.
Регистровая память включает в себя 32
РОНа (32 байта) и служебные регистры ВВ
(64 байта). В области регистров ВВ
расположены различные служебные регистры
(регистр указатель стека, регистр
состояния и др.), а также регистры
управления ПУ, входящими в состав МК.
Для хранения переменных программ вместе
с регистрами также может использоваться
статическое ОЗУ. Есть возможность
подключения внешнего статического ОЗУ
объемом до 64 Кбайт. Для хранения данных,
которые могут изменяться в процессе
настройки и функционирования готовой
системы (калибровочные константы,
серийные номера, ключи и т. п.), может
быть использована EEPROM.
Эта память расположена в отдельном
адресном пространстве, а доступ к ней
осуществляется с помощью определенных
РВВ.
Память SRAM имеет объём 512 байт, EEPROM – также 512 байт. ERAM – внешняя память данных. Запись информации в ячейку EEPROM длиться 2.5-4 мс. В AVR хорошо представлены UART, SPI и TWI (I2C) (в ATMega). Таймеры T0, T1, T2 и WDT. Работа с ERAM происходит медленнее, чем с SRAM (1 МТ). В МК AVR есть режимы энергосбережения Idle и Power Down Mode. Выход из режимов длиться 16 мс.