

2.3 Виды управляющих и возмущающих воздействий
Системы автоматического управления и регулирования подвергаются воздействиям двух видов: внутренним и внешним.
Внутренние воздействия возникают как результат взаимодействия элементов между собой. Типичным примером внутреннего воздействия является действие регулятора на объект.
Внешнее
воздействия на систему может передаваться
как через объект регулирования, так и
через любой другой элемент системы.
Наряду с активными внешними воздействиями
встречаются воздействия, рассматриваемые
как помехи. В дальнейшем внешние
воздействия на систему через объект
будем обозначать
![]() .
.
При анализе динамических процессов в системах автоматического регулирования в качестве сигналов управления или возмущения выбирают некоторые типовые сигналы. Сигнал изображенный на рисунке 2.6, представляет собой ступенчатое воздействие. Аналитически ступенчатое воздействие записывается следующим образом:
![]()
а – постоянное значение в предыдущий период, b – новое постоянное значение в последующий период.
Рисунок 2.6 – Единичное ступенчатое воздействие
Частный случай ступенчатого воздействия – единичное ступенчатое воздействие:
![]()
К воздействию такого рода наиболее часто прибегают при оценке качества процессов регулирования.
Следующий вид воздействия – импульсное возмущение, изображенное на рисунке 2.7 а, б, в.
а) б) в)
Рисунок 2.7 – Импульсные сигналы
Импульсный
сигнал можно рассматривать как предел
прямоугольного импульса высотой
![]() и длительностью
и длительностью
![]() .
При
.
При
![]() ,
,
![]() ,
площадь импульса
,
площадь импульса
![]() .
Импульсный сигнал представляет собой
производную от ступенчатого сигнала
.
Импульсный сигнал представляет собой
производную от ступенчатого сигнала
![]()
где
![]() -
дельта-функция, равная производной
-
дельта-функция, равная производной
![]() от
единичной ступенчатой функции
от
единичной ступенчатой функции
![]() .
Математически дельта-функция выражается
так
.
Математически дельта-функция выражается
так
![]()
причем
![]() .
.
Дельта-функция обладает следующими свойствами:
1)
![]() ;
;
2)
![]() .
.
Первое свойство означает, что, несмотря на пренебрежимо малую длительность функции, площадь, ограниченная ею, имеет конечное значение равное единице.
Второе
свойство означает, что импульсная
функция, полученная как произведение
произвольной функции
![]() на дельта-функцию
,
существует лишь в момент
на дельта-функцию
,
существует лишь в момент
![]() и площадь ее равна значению функции
и площадь ее равна значению функции
![]() в
точке
.
в
точке
.
Если для сигналов управления справедливы соотношения
![]() ,
,
то управляющее воздействие изменяется по линейному закону (рисунок 2.8). Такое воздействие называют скачок скорости.
Рисунок 2.8 – Линейно изменяющееся воздействие
Возможен степенной закон изменения управляющего воздействия (рисунок 2.9). Такое воздействие называют скачком ускорения.
![]()
Рисунок 2.9 – Воздействие, изменяющееся по степенному закону
Скачок
скорости и скачок ускорения – возмущения,
являющиеся стандартными для следящих
систем, которые работают в режиме
постоянной скорости
![]() или постоянного ускорения
или постоянного ускорения
![]() .
.
Периодическое
возмущение это возмущение, изменяющееся
периодически во времени. Оно удобно для
исследования автоматических систем,
работающих в режиме незатухающих
колебаний. Самым простым периодическим
возмущением является гармоническое
колебание единичной амплитуды
![]() (рисунок 2.10, а). На многие объекты систем
регулирования действуют периодические
сигналы в виде треугольных импульсов
(рисунок 2.10, б), периодически повторяющихся
парабол (рисунок 2.10, в). В ряде случаев
в качестве типового возмущения используют
периодически повторяющуюся ступенчатую
функцию с максимальным (или минимальным)
значением
(рисунок 2.10, а). На многие объекты систем
регулирования действуют периодические
сигналы в виде треугольных импульсов
(рисунок 2.10, б), периодически повторяющихся
парабол (рисунок 2.10, в). В ряде случаев
в качестве типового возмущения используют
периодически повторяющуюся ступенчатую
функцию с максимальным (или минимальным)
значением
![]() (рисунок 2.10, г).
(рисунок 2.10, г).
а)
|
б)
|
в) |
г) |

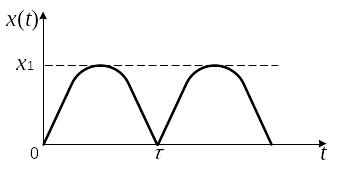
Рисунок 2.10 – Периодические воздействия
Существуют системы автоматического регулирования, на вход которых наряду с регулярным воздействием поступает сигнал в виде флюктуаций, представляющих собой случайные функции от времени, т.е. такие функции, значение которых при каждом данном аргументе являются случайной величиной. Сигнал этого типа относится к случайным воздействиям и может быть представлен в виде суммы стандартных воздействий (рисунок 2.11). Уровень случайной функции может изменяться в широких пределах.
Рисунок 2.11 – Случайное воздействие