

5. Основные принципы управления. Разомкнутые системы. Управление с внутренней моделью.
Управлением называется любое действие, вносящее желаемые изменения в процесс, подлежащий управлению. Под процессом понимается нечто, изменяющееся качественно или количественно во времени.
Применяют два основных принципа управления: один из них приводит к разомкнутой системе, второй – к замкнутой системе.
К разомкнутой системе (системе без ОС) приходим, используя:
а )
управление с прямой связью.
)
управление с прямой связью.
Функциональная
схема разомкнутой системы – последовательное
соединение УУ и ОУ. Из основной задачи
управления следует, что управляющее
устройство УУ должно быть спроектировано
так, чтобы y(t)
было близко к v(t).
Правило (алгоритм) преобразования v(t)
в u(t)
называется законом
управления.
Для управления с прямой связью закон
управления в общем имеет вид
![]() ,
,
где Fр – оператор, показывающий, какие действия нужно совершить над v(t), чтобы получить u(t).
Т.к. сигналы распространяются в одном направлении от входа к выходу – система разомкнутая (последовательное соединение элементов). Для получения y(t)≈v(t), нужно выбрать характеристики УУ так, чтобы они были обратными характеристикам ОУ, т.е. УУ должен представлять собой инверсный ОУ. Такое управление называется инверсным управлением.
Недостатки: разомкнутым системам присуще низкое качество управления в силу того, что, во-первых, они весьма чувствительны к изменению свойств ОУ, во-вторых, не могут обеспечить снижение влияния возмущающих воздействий, в-третьих, их нельзя использовать для управления неустойчивыми ОУ, в-четвертых, форсированное управление, используемое в связи с инерционностью ОУ, приводит к недопустимо большим значениям управляющего воздействия u(t).
б) Принцип Понселе-Чиколева: управление по возмущению.
Т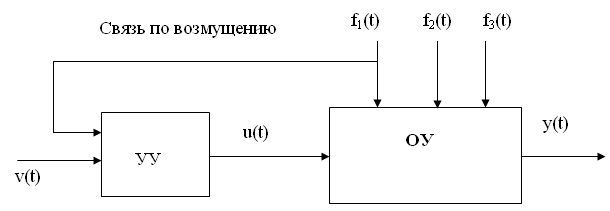 акой
принцип управления позволяет повысить
качество разомкнутой системы за счет
уменьшения влияния основного измеряемого
(контролируемого) возмущающего воздействия
f(t).
При этом закон управления имеет вид
акой
принцип управления позволяет повысить
качество разомкнутой системы за счет
уменьшения влияния основного измеряемого
(контролируемого) возмущающего воздействия
f(t).
При этом закон управления имеет вид
![]() .
.
Для функциональной схемы системы в данном случае характерно наличие связи по возмущению, с помощью которой вводится в УУ информация о измеряемом возмущающем воздействии.
Как видим, u(t) зависит как задающего воздействия v(t), так и от измеряемого возмущающего воздействия f1(t). При этом в принципе можно построить инвариантные к возмущающему воздействию системы, т.е. системы, в которых y(t) не зависит от f1(t).

Управление с внутренней моделью.
При управлении с внутренней моделью, нечёткая модель объекта управления располагается параллельно с реальным ОУ. Главная особенность данной схемы управления, по сравнению с классическими схемами, – это то, как она обрабатывает разность между выходным сигналом модели (ym) и реального ОУ (у). Данная разность em=y-ym характеризует собой ошибку моделирования и (или) немоделируемые шумы объекта управления. Она по цепи обратной связи поступает в УУ, представляющий собой обратную модель ОУ, где используется для компенсации возмущения или (и) ошибки моделирования.
Свойства управления с внутренней моделью таковы, что эта часть контроллера должна быть связана с инверсией модели ОУ.