

1.6. Векторные диаграммы синхронного генератора
При анализе работы синхронных машин обычно используют векторные диаграммы: при качественном—упрощенные диаграммы, справедливые для машин, в которых отсутствует насыщение, а при количественном—уточненные диаграммы.
Неявнополюсная машина. Для цепи якоря неявнополюсной синхронной машины можно написать уравнение
![]() (1.18а)
(1.18а)
или
![]() , (1.18б)
, (1.18б)
где Esa – э.д.с, индуктированная в обмотке якоря потоком рассеяния; xsa—индуктивное сопротивление, обусловленное этим потоком.
На рис. 1.23, а изображена векторная диаграмма, построенная по (1.18б), называемая диаграммой Потье. Эта диаграмма позволяет определить э. д. с. холостого хода Е0 с учетом насыщения машины, если заданы напряжение, ток нагрузки (по величине и фазе), характеристика холостого хода и параметры машины. Сначала по известным падениям напряжения строится вектор э. д. с.
![]() . (1.18)
. (1.18)
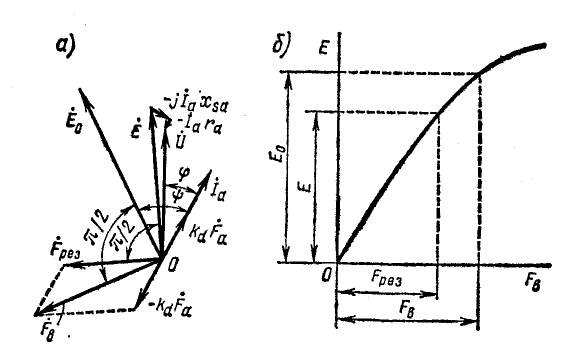
Рис. 1.23 - Векторная диаграмма синхронной неявнополюсной машины (а) и
определение э. д. с. по характеристике холостого хода (б)
Так как э.д. с. Е индуктируется результирующим потоком Фрез, который создается результирующей м.д. с.
![]()
по характеристике
холостого хода (рис. 1.23, б) можно
определить Fрез,
соответствующую э.д. с. Е. Вектор
![]() совпадает по фазе с вектором
совпадает по фазе с вектором
![]() ,
а оба эти вектора опережают по фазе
вектор Ė на 90°.
,
а оба эти вектора опережают по фазе
вектор Ė на 90°.
Зная и параметры машины, можно найти м.д.с. возбуждения
![]() ,
,
а затем по
характеристике холостого хода определить
величину э.д. с. холостого хода Е0.
Вектор Ė0 отстает от
вектора
![]() на 90°.
на 90°.
Если требуется перейти от режима холостого хода к режиму нагрузки, то построения производят в обратном порядке.
Если машина не
насыщена, то векторная диаграмма
существенно упрощается, так как в этом
случае складывают не м.д. с.
и
![]() ,
а соответствующие им потоки и э. д. с.
Упрощенную векторную диаграмму синхронной
неявнополюсной машины (рис. 1.24, а)
строят по уравнению (1.18
б), которое с учетом (1.12)
принимает вид
,
а соответствующие им потоки и э. д. с.
Упрощенную векторную диаграмму синхронной
неявнополюсной машины (рис. 1.24, а)
строят по уравнению (1.18
б), которое с учетом (1.12)
принимает вид
. (1.19а)
Поскольку падение напряжения в активном сопротивлении обмотки статора Iаrа сравнительно невелико, им можно пренебречь. Заменяя, кроме того, в уравнении (8-19а) Ėа = – jİаха, получим
![]() . (1.19б)
. (1.19б)
Величину xa + xsa = xсн называют полным или синхронным индуктивным сопротивлением машины. Следовательно, уравнение (1.19б) может быть представлено в виде
![]() . (1.19в)
. (1.19в)
Упрощенная векторная диаграмма, соответствующая уравнению (1.19в), изображена на рис. 1.24, б; ее широко используют при качественном анализе работы синхронной машины. Необходимо, однако, отметить, что определение Ė0 по упрощенной диаграмме дает несколько большую величину, чем по точной диаграмме (см. рис. 1.23, а), в которой учитывается насыщение.
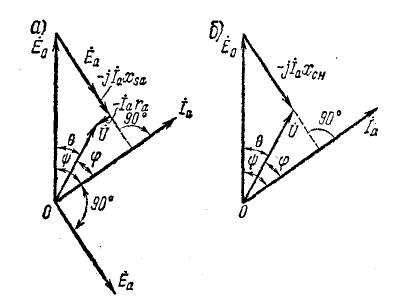
Рис. 1.24 - Упрощенная векторная диаграмма синхронной неявнополюсной
машины с учетом (а) и без учета (б) активного падения напряжения в якоре
Угол θ между векторами Ù и Ė0 называют углом нагрузки. При работе синхронной машины в генераторном режиме напряжение Ù всегда отстает от э.д.с. Ė0, в этом случае угол θ считается положительным. Чем больше нагрузка генератора (отдаваемая им мощность), тем больше угол θ.
Явнополюсная машина. Упрощенную диаграмму синхронной явнополюсной машины также можно построить по общему уравнению (1.18а), которое с учетом (1.15) принимает вид
![]() . (1.20а)
. (1.20а)
На рис. 1.25, а приведена векторная диаграмма, соответствующая уравнению (1.20а). Если пренебречь малой величиной rа, то
![]() .
(1.20б)
.
(1.20б)
Э. д. с. Ėsa, индуктируемую в обмотке якоря потоком рассеяния, можно представить в виде суммы двух составляющих — Ėsad и Ėsaq, ориентированных по осям d—d и q—q:
![]() , (1.21)
, (1.21)
где
![]() ;
;
![]() ,
(1.22)
,
(1.22)
так как
![]() ;
;
![]()
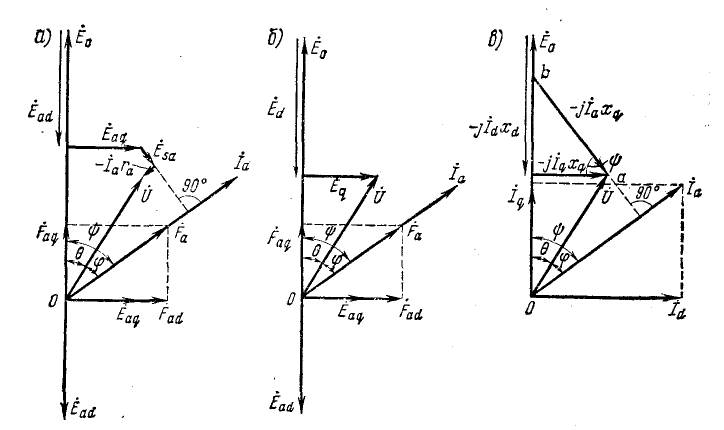
Рис. 1.25 - Упрощенные векторные диаграммы синхронной явнополюсной машины:
а—с учетом активного падения напряжения в якоре: б —без учета
этого падения напряжения; в—с заменой э. д. с. на реактивные
падения напряжения
С учетом (1.22) вместо (1.20б) получим
![]() , (1.23а)
, (1.23а)
где Ėd = Ėad + Ėsad и Ėq = Ėaq + Ėsaq.
Векторная диаграмма, построенная по (1.23а), приведена на рис. 1.25, б.
Заменяя э. д. с. соответствующими реактивными падениями напряжения, будем иметь
![]() , (1.23б)
, (1.23б)
где xd = xad + xsa; xq = xaq + xsa.
Сопротивления xd и xq называют полными или синхронными индуктивными сопротивлениями обмотки якоря по продольной и поперечной осям..
На рис. 8-25, в
приведена векторная диаграмма,
построенная по (8-23б). Если заданы векторы
тока İа и напряжения
Ù, а угол ψ неизвестен,
то его можно определить, проведя из
конца вектора напряжения Ù отрезок
![]() ,
равный Iахq
и перпендикулярный вектору тока.
Конец построенного отрезка будет
расположен на векторе э.д. с. Ė0
или его продолжении, так как проекция
отрезка
на вектор Ėq
равна модулю этого вектора:
,
равный Iахq
и перпендикулярный вектору тока.
Конец построенного отрезка будет
расположен на векторе э.д. с. Ė0
или его продолжении, так как проекция
отрезка
на вектор Ėq
равна модулю этого вектора:
![]() .
.