

Дифференциальный метод определения погрешностей механизмов.
Одним из аналитических методов определения погрешности механизма является дифференциальный метод. Суть метода состоит в составлении уравнения (функции) положения механизма с последующим нахождением полного дифференциала этой функции и заменой конечными приращениями бесконечно малых приращений функции и аргументов. В общем случае уравнение, определяющее положение ведомого звена механизма, является функцией S нескольких переменных: q1, q2, q3, ..., qn , т.е.
S=¦(q1, q2, q3, ..., qn).(8.8)
Этими переменными могут быть координаты ведущего звена, размеры звеньев, параметры, определяющие положение звеньев, и т.д. Тогда полный дифференциал функции (8.8) запишется в виде
![]() Заменив
в выражении (8.9) бесконечно малые
приращения аргументов конечными
приращениями, которые являются первичными
ошибками соответствующих параметров,
получим выражения для погрешности
механизма DS в виде
Заменив
в выражении (8.9) бесконечно малые
приращения аргументов конечными
приращениями, которые являются первичными
ошибками соответствующих параметров,
получим выражения для погрешности
механизма DS в виде![]()
где Dq1, Dq2,…, Dqn – первичные ошибки параметров q1 ,q2 ,…, qn .
Выражение для погрешности механизма
(8.10) представляет собой сумму частных
погрешностей DS1 , DS2 , …, DSn ,каждая из
которых определяет вклад первичных
ошибок в погрешность механизма в целом.
Частная погрешность DSi , соответствующая
аргументу qi , определяется выражением
![]() где
где![]() коэффициент влияния первичной ошибки
i–го параметра на погрешность механизма.
коэффициент влияния первичной ошибки
i–го параметра на погрешность механизма.
Точность изготовления и виды сопряжений зубчатых колес.
Показатели точности цилиндрических зубчатых передач с модулем зацепления 0,1 Ј m < 1,0 мм устанавливаются стандартом ГОСТ 9178–81.
В соответствии со стандартом все зубчатые колеса по точности изготовления разделены на 12 степеней точности, обозначаемых в порядке убывания точности цифрами от 1 до 12. Параметры точности 3–5-й степеней предназначены главным образом для измерительных колес, в зацеплении с которыми контролируются зубчатые колеса. Наиболее широко распространенными являются колеса 6–9-й степеней точности.
Для каждой степени точности стандарт устанавливает три нормы точности:
– норма кинематической точности;
– норма плавности работы;
– норма контакта зубьев.
Н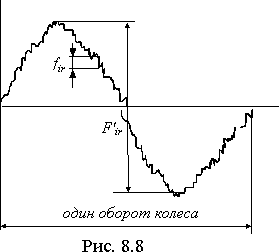 орма
кинематической точности характеризует
согласованность поворота зубчатого
колеса с поворотом находящегося с ним
в зацеплении контрольного колеса. Для
зубчатого колеса норма кинематической
точности определяется как максимальная
погрешность Fir' угла поворота в пределах
полного оборота колеса (рис.8.8).
Кинематическая точность важна для
зубчатых передач точных кинематических
цепей, отсчетных и делительных механизмов.
орма
кинематической точности характеризует
согласованность поворота зубчатого
колеса с поворотом находящегося с ним
в зацеплении контрольного колеса. Для
зубчатого колеса норма кинематической
точности определяется как максимальная
погрешность Fir' угла поворота в пределах
полного оборота колеса (рис.8.8).
Кинематическая точность важна для
зубчатых передач точных кинематических
цепей, отсчетных и делительных механизмов.
Норма плавности работы характеризует равномерность хода колеса. Она регламентирует циклические погрешности, многократно повторяющиеся за один оборот колеса. Показателем плавности работы колеса является местная кинематическая погрешность fir (рис.8.8). Значение нормы плавности работы имеет особое значение для точных отсчетных и делительных устройств, высокоскоростных передач, механизмов с высокими требованиями плавности перемещений.
Н орма
контакта зубьев определяет величину
и расположение области прилегания
боковых поверхностей зубьев сопряженных
колес по длине и высоте зуба в процентах
(рис.8.9):
орма
контакта зубьев определяет величину
и расположение области прилегания
боковых поверхностей зубьев сопряженных
колес по длине и высоте зуба в процентах
(рис.8.9):
![]()
где a, hm – соответственно ширина и высота пятна контакта на боковой поверхности зуба; b – ширина зуба; hp – высота активной боковой поверхности зуба. Эта норма имеет существенное значение для тяжелонагруженных передач. Для малонагруженных передач приборных устройств норма контакта зубьев не имеет существенного значения и чаще всего не контролируется.
Все три нормы точности являются независимыми одна от другой. Одно и то же зубчатое колесо может иметь нормы точности, соответствующие различным степеням точности.
Н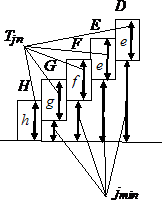 езависимо
от точности изготовления зубчатых колес
стандарт устанавливает для мелкомодульных
передач (m<1мм) пять видов сопряжений
колес. Виды сопряжений обозначаются
буквами H, G, F, E, D и каждый из них определяет
величину минимального гарантированного
бокового зазора jmin в зацеплении пары
зубчатых колес (рис.8.10). Гарантированный
боковой зазор исключает возможность
заклинивания передачи при нагреве, а
также обеспечивает условия смазки
зубьев.
езависимо
от точности изготовления зубчатых колес
стандарт устанавливает для мелкомодульных
передач (m<1мм) пять видов сопряжений
колес. Виды сопряжений обозначаются
буквами H, G, F, E, D и каждый из них определяет
величину минимального гарантированного
бокового зазора jmin в зацеплении пары
зубчатых колес (рис.8.10). Гарантированный
боковой зазор исключает возможность
заклинивания передачи при нагреве, а
также обеспечивает условия смазки
зубьев.
Значение максимального бокового зазора зависит от величины допуска Tjn на боковой зазор. Стандарт устанавливает четыре вида допусков на боковой зазор – h, g, f, e. Обозначения видов сопряжений и допусков даны в порядке возрастания величины бокового зазора и допуска на него.
На рис. 8.10 показано расположение полей допусков боковых зазоров, значение которых Tjn. Каждому виду сопряжения H, G, F соответствует один вид допуска на боковой зазор, соответственно h, g, f. Для видов сопряжения E и D устанавливается один вид допуска – e.
Точность изготовления цилиндрических зубчатых колес и передач задается степенью точности, а требования к боковому зазору – видом сопряжения по нормам бокового зазора и его допуском.
Пример условного обозначения точности передач с нерегулируемым расположением осей, со степенью точности 7 по всем трем нормам, с видом сопряжения колес G и соответствием между видом сопряжения и допуском на боковой зазор: 7-G ГОСТ9178–81.
При комбинировании норм разных степеней точности и изменении соответствия между видом сопряжения и видом допуска на боковой зазор, точность зубчатых колес и передач обозначается следующим образом: 6-7-7-Gf ГОСТ9178–81.