

2.5 Расчет исполнительного механизма
И сполнительный
механизм основан на работе широко
применяемого в технике кривошипно-шатунного
механизма (рисунок 2.9).
Это устройство служит для преобразования
вращательного движения вала 2 в
возвратно-поступательное движение
амортизатора 4.
сполнительный
механизм основан на работе широко
применяемого в технике кривошипно-шатунного
механизма (рисунок 2.9).
Это устройство служит для преобразования
вращательного движения вала 2 в
возвратно-поступательное движение
амортизатора 4.
1 - кривошип; 2 - вал; 3 - шатун; 4 - амортизатор.
Рисунок 2.9 - Кривошипно-шатунный механизм
Эффективность передачи усилия от вала 2 к амортизатору 4 через кривошип 1 и шатун 3 кривошипно-шатунного механизма зависит от углов α и β, образуемыми между коленом 1 и шатуном 3 и между шатуном 3 и перпендикуляром к направлению движения амортизатора 4 соответственно.
Максимальная передача этого усилия будет в таких фазах вращения вала 2 когда эти углы будут прямыми (90 градусов) и направление шатуна 3 в пространстве совпадает с направлением возвратно-поступательного движения амортизатора 4, а колено 1 перпендикулярно шатуну 3.
Однако в течение всего оборота вала 2 вокруг своей оси такого не происходит, поскольку, когда один из этих углов становится прямым, второй не равен прямому.
Максимальная передача усилия от вала 2 к амортизатору 4 происходит только в двух отдельных фазах вращения вала 2, находящимися между мёртвыми точками. А в мёртвых точках (когда угол α=180 градусов, а β=90 градусов) эффективность передачи усилия равна нулю. В остальных фазах вращения вала 2 эффективность передачи усилия находится между максимальным и минимальным значениями.
При увеличении длины шатуна 3 относительно длины колена 1 эффективность передачи усилия повышается. Если за нулевую фазу вращения вала 2 принять верхнюю мёртвую точку, то при условном бесконечном отношении длины шатуна 3 к длине колена 1 усилие в фазах вращения 90 и 270 градусов передаётся полностью (эффективность передачи равна 100%), то есть углы α и β являются прямыми.
Зависимость эффективности передачи усилия от вала 2 к амортизатору 4 от фазы вращения вала 2 для такого варианта конструкции кривошипно-шатунного механизма приведена на рисунке 2.10.

Рисунок 2.10 - Зависимость эффективности передачи усилия от фазы
вращения вала
Залитая цветом фигура на рисунке является внутренней областью линий эффективности преобразования, то есть фигурой, отражающей эффективность. Как видно из рисунка эффективность передачи усилия от вала 2 к амортизатору 4 максимальна в двух фазах вращения вала 2, равных 90 и 270 градусов и равна нулю в двух других фазах вращения вала, равных 0 и 180 градусов (верхняя и нижняя мёртвые точки).
Соответственно, скорость движения амортизатора будет максимальна при углах, равных 90 и 270 градусов, и равна нулю при 0 и 180 градусах.
При проверке амортизатора на стенде скорость Va не должна превышать 1 м/с. Сравним ее с истинной скоростью Vист.
Исходные данные для расчета:
- максимальная длина шатуна L=300 мм;
- максимальный радиус кривошипа R=100 мм;
- максимальная частота вращения выходного вала nвых=85 мин-1.
Так как кривошип вращается по окружности, то ее диаметр равен номинальному ходу поршня амортизатора. Это значение принимается с учетом максимального хода поршня из таблицы 2.1 и равно 200мм. Следовательно, радиус кривошипа равен 100 мм (половине диаметра окружности).
В
тех случаях, когда
![]() ,
то есть длина шатуна 3 существенно больше
длины кривошипа 1, то расчет ведется по
следующим формулам.
,
то есть длина шатуна 3 существенно больше
длины кривошипа 1, то расчет ведется по
следующим формулам.
Для получения формул перемещения X и аналога скорости Х’ раскладываем радикал в ряд по формуле бинома Ньютона:
![]() .
(2.9)
.
(2.9)
Если
ограничиться двумя первыми членами
ряда и учесть, что
![]() (2.10),
то уравнение для определения перемещения
Х имеет вид:
(2.10),
то уравнение для определения перемещения
Х имеет вид:
![]() .
(2.11)
.
(2.11)
Соответственно аналог скорости Х’ определяется по формуле:
![]() .
(2.12)
.
(2.12)
При значении угла α=90 градусов получим:
![]() .
.
Действительная скорость Vист равна:
Vист=ω∙Х, (2.13)
где ω - угловая скорость вращения вала.
Она находится по формуле:
![]() с-1.
с-1.
Следовательно:
Vист=8,9∙0,1=0,89 (м/с).
Таким образом, скорость амортизатора Va на стенде не превышает 1 м/с.
Крепление кривошипно-шатунного механизма на выходном валу редуктора производится при помощи призматической шпонки 10х8х20.
На рисунке 2.11 показано их соединение.
Шпонку выбираем по величине диаметра вала редуктора.
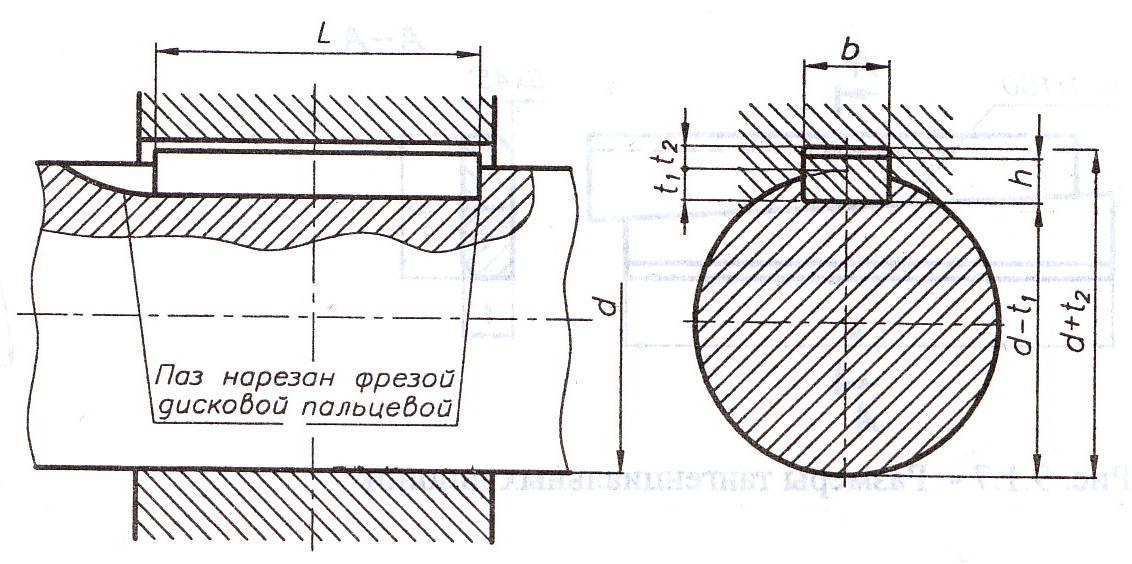
Рисунок 2.11 - Соединение вал - КШМ призматической шпонкой
Для данного соединения в таблице 2.6 приведены размеры сечений пазов и их предельные отклонения.
Таблица 2.6 - Размеры сечений пазов и их предельные отклонения
В миллиметрах
-
Вал
Шпонка
Шпоночный паз
d
b
h
L
rmin
rmax
Ширина
Глубина
b
Вал
Втулка
t1
t2
rmin
rmax
40
10
8
20
0,4
0,6
10
-0,051
-0,015
5
3,3
0,25
0,4
Н а
рисунке 2.12 показан кривошипно-шатунный
механизм и его геометрические размеры.
а
рисунке 2.12 показан кривошипно-шатунный
механизм и его геометрические размеры.
Рисунок 2.12 - Геометрические размеры кривошипно-шатунного механизма
Кривошипно-шатунный механизм выполняется в виде диска, изготовленного из стали 45. Его толщина равна 20 мм, а диаметр - 230 мм. Для крепления шатуна в диске прорезается отверстие размером 65х8 по радиусу от центра.
При установке шатуна в начало или в его конец можно менять ход поршня амортизатора, от минимального (70 мм) до максимального (200 мм). Шатун также изготавливается из стали 45 в виде трубки диаметром 10 мм и длиной 300 мм.
Другой его конец прикрепляется к нижней проушине амортизатора и направляющей. Направляющая представляет из себя телескопическую трубку, предназначенную для того чтобы амортизатор двигался по одной вертикальной прямой.