

8.2. Многомерные системы регулирования
К многомерным относятся системы
управления и регулирования, имеющие
несколько регулируемых величин
![]()
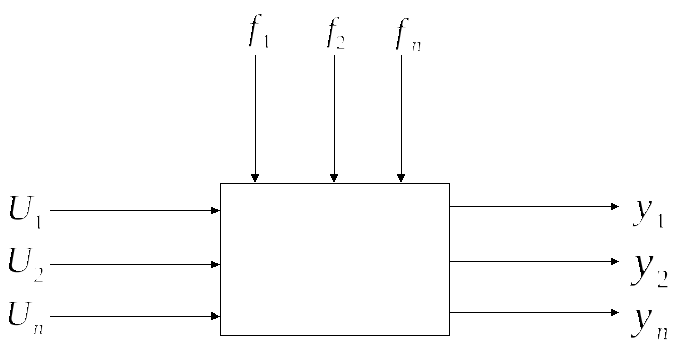
Многомерная система предполагает
наличие многомерного объекта управления,
который характеризуется существованием
нескольких входов (точек приложения
управляющих
![]() и возмущающих
и возмущающих![]() воздействий) и нескольких выходов,
определяющих результируемыми величинами.
воздействий) и нескольких выходов,
определяющих результируемыми величинами.
В общем случае переменные и возмущения
связаны между собой и с параметрами
устройств, вырабатывающих
![]() ,
,
![]() …
…![]() системой дифференциальных урпавнений,
которые принято записывать в форме
Коши.
системой дифференциальных урпавнений,
которые принято записывать в форме
Коши.
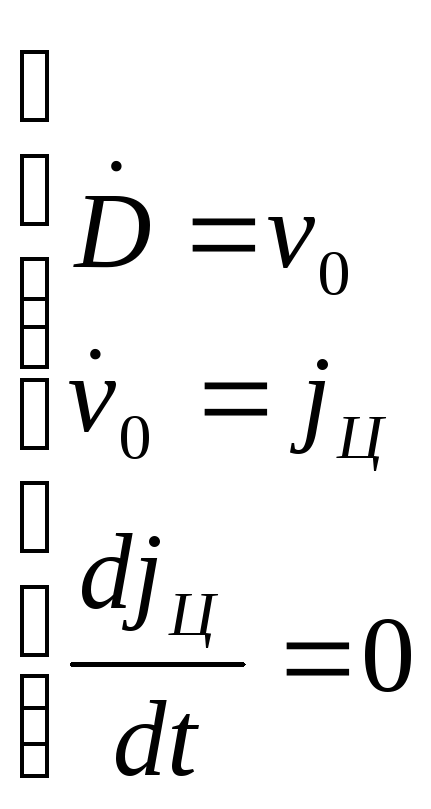
Пример: требуется следить за дальностью
D до цели и скоростью
сближения
![]() измерителя
с целью.
измерителя
с целью.
Если измеритель неподвижен, а цель
перемещается с постоянным ускорением
![]() ,
направленным вдоль РСН, относительно
движение цели и измерителя характеризуется
тремя дифференциальными уравнениями
в форме Коши:
,
направленным вдоль РСН, относительно
движение цели и измерителя характеризуется
тремя дифференциальными уравнениями
в форме Коши:
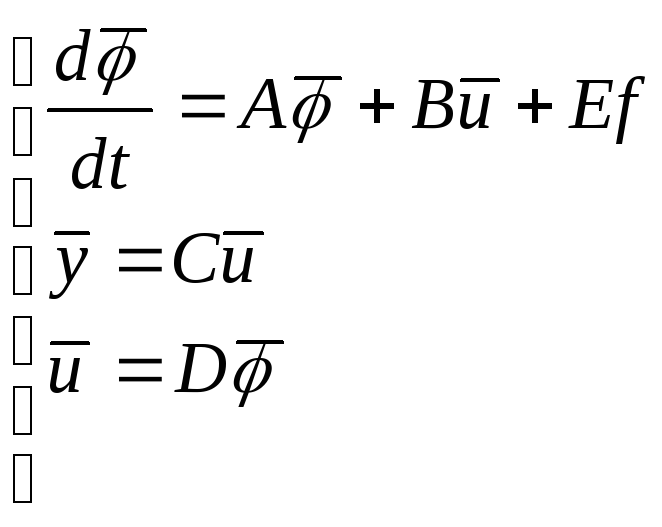
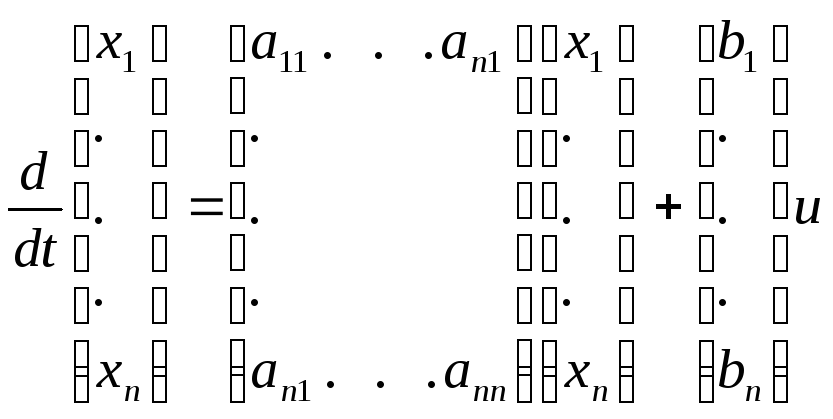
Многомерный объект описывается системой уравнений, которую удобно представить в векторно-матричной форме (без обозначения зависимости от t)
![]()
Здесь
![]() -
вектор управляемых параметров, с
компонентами
-
вектор управляемых параметров, с
компонентами
![]()
![]() -
динамическая матрица
-
динамическая матрица
![]() ,
элементы которой отображают динамические
свойства устройств формирования
,
элементы которой отображают динамические
свойства устройств формирования
![]()
![]() вектор
управления, содержащий
вектор
управления, содержащий
![]() состав
состав
![]() -
матрица управления размером
-
матрица управления размером
![]()
![]() -
вектор возмущающих воздействий
-
вектор возмущающих воздействий
Структурная схема замкнутой многомерной системы регулирования
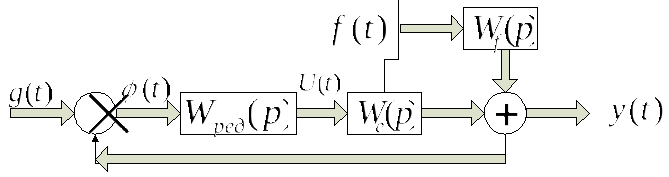
Все символы соответствуют матрицам:
![]() -
задающих воздействий
-
задающих воздействий
![]() -
регулируемых величин
-
регулируемых величин
![]() -
ошибок для каждой регулируемой величины
-
ошибок для каждой регулируемой величины
![]() -
управляющих воздействий
-
управляющих воздействий
![]() -
возмущений
-
возмущений
![]() -
передаточных функций для управления
-
передаточных функций для управления
![]() -
передаточных функций для возмущения
-
передаточных функций для возмущения
![]() -
передаточных функций для регулирующего
устройства, которое определяет
используемые законы управления
-
передаточных функций для регулирующего
устройства, которое определяет
используемые законы управления
Исходные дифференциальные уравнения ортогональной системы могут быть представлены в форме Коши в векторной (матричной) записи
Когда описывается внутренняя структура
системы – в описание в пространстве
состояний, кроме «внешних» переменных
g и y, вводятся
«внутренние» переменные (переменные
состояния)
![]() …
…![]()
Число переменных состояния равно размерности системы и, как правило, совпадает с порядком передаточной функции
Стандартное описание:
![]() ,
,
![]()
Что эквивалентно:
Постоянная (квадратная) матрица А характеризует внутреннюю структуру системы и ее свободное движение
Постоянные матрицы В и С характеризуют структуру входного и выходного устройств.
Может быть приведено к каноническому виду после соответствующего выбора переменных состояния (линейно-независимых). Их число всегда должно быть равно порядку объекта – порядку д.у.
Проще всего в качестве переменных состояния брать у и ее производные до (n-1)-й включительно.
![]() ,
,
![]() .
. .
.
. .
![]()
Следовательно, имеем систему уравнений:
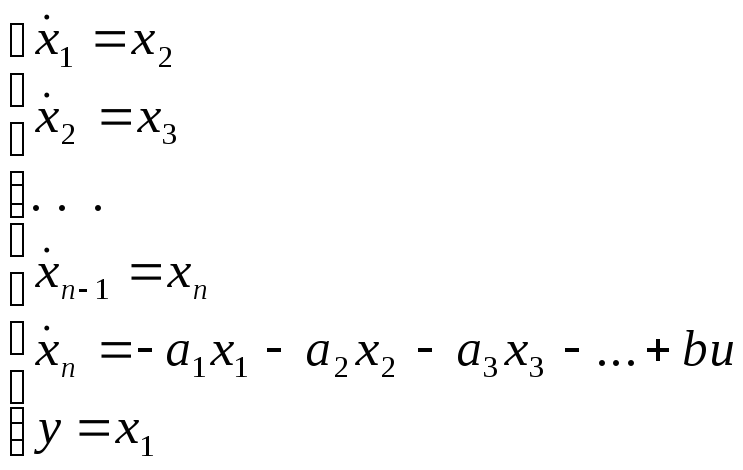
Равносильно:
 -
-
![]()
![]()
![]()
![]()
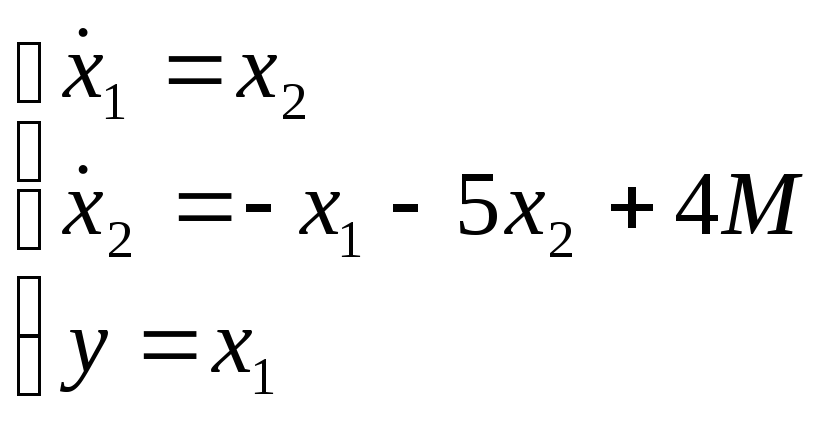
Одноканальный объект
![]()
Выбираем переменные состояния
![]()
![]()
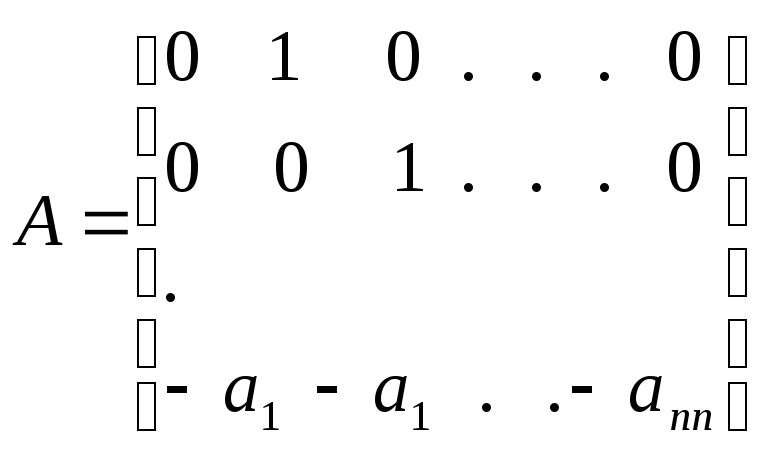
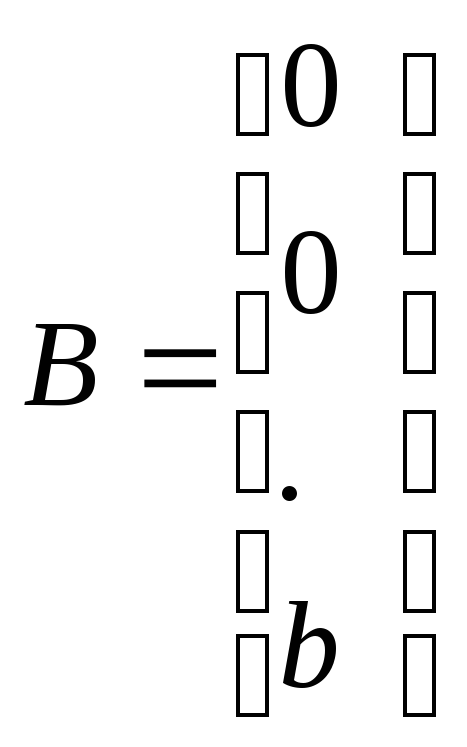
Следовательно, уравнения состояния и матрицы объекта:
![]()
![]()
![]()
2.
![]()
![]()
Переменные состояния:
![]()
![]()
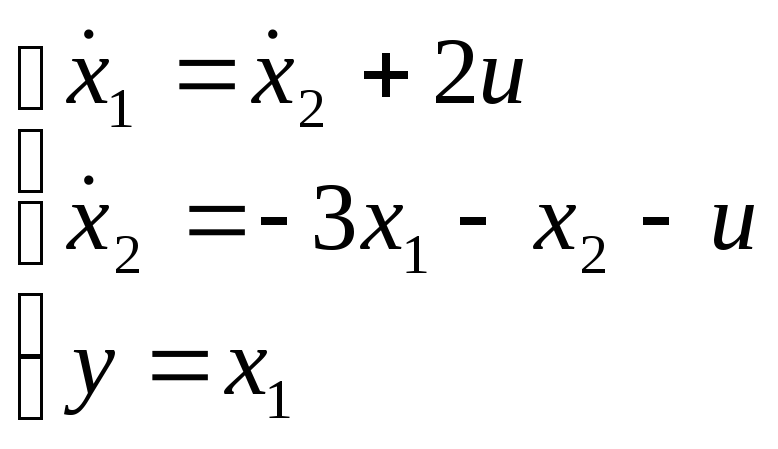

![]()
![]()
Можно по матричному описанию найти передаточную функцию
![]()
![]()
![]()
Следовательно:
![]()
![]()
![]()
![]()
Т.е. знаменатель ПФ совпадает с характеристическим полиномом матрицы А