

2.2. Соединение звеньев в системах автоматического управления
Любая САУ состоит из набора отдельных звеньев, соединенных между собой определенным образом.
Любой ЭА описывается некоторой передаточной функцией. Для определения результирующей ПФ САУ представляют в виде параллельного или последовательного соединения отдельных элементов, которые могут быть охвачены обратной связью.
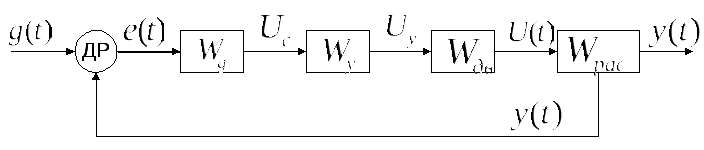
Структурную схему системы получают из функциональной путем замены функциональных элементов (двигателей, редукторов, усилителей и т.д.) звеньями, описываемыми их передаточными функциями.
Схема системы из п. 2.2 будет выглядеть так:
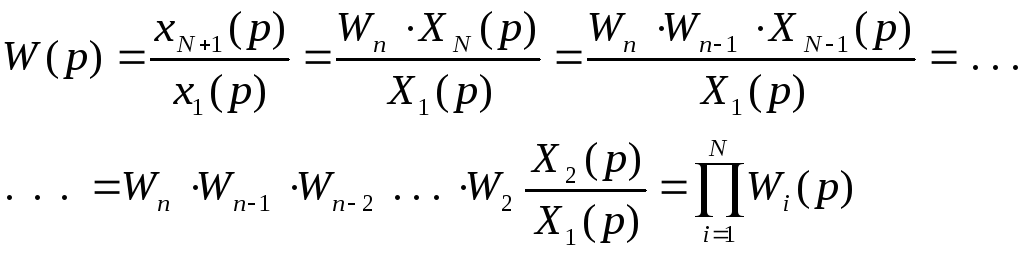
3.1. Последовательное соединение звеньев.
Пример – предыдущая схема

Соединение, при котором выходная величина звена является входной для следующего, называется последовательным соединением звеньев.
![]()
![]() - ?
- ?
Существенным для правильности дальнейших выводов является выполнение условия:
Подключение выхода одного устройства ко входу другого, следующего за ним, не должно изменять характеристик первого.
Это условие выполняется, если сопротивление выходных каскадов удовлетворяет неравенству
![]()
Таким образом происходит согласование элементов автоматики
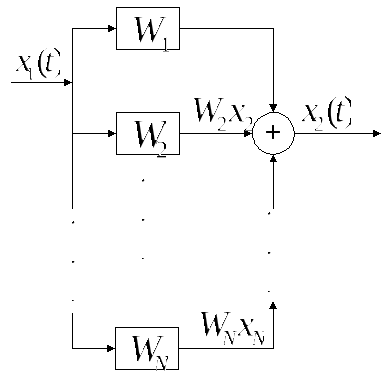
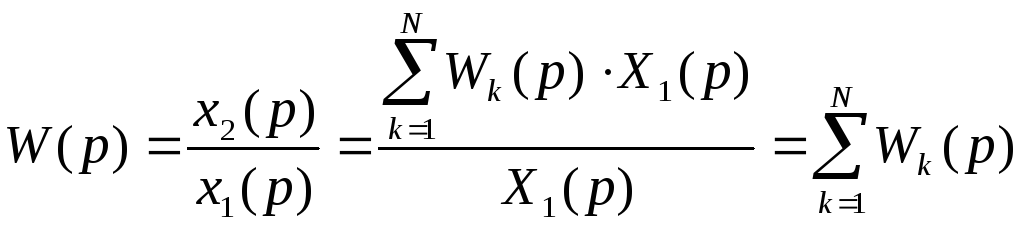
2.3.2. Параллельное соединение звеньев
При параллельном соединении входная величина поступает на входы всех звеньев, а выходная величина равна сумме выходных величин отдельных звеньев.
![]() - ?
- ?
2.3.3. Охват звена обратной связью
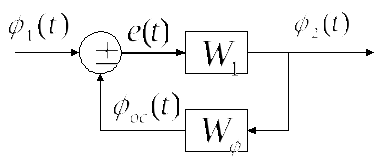
Условие: подключение звена обратной
связи к выходу звена с ПФ
![]() не должно влиять на его характеристики
не должно влиять на его характеристики
![]()
![]()
![]()
2.4. Основные передаточные функции замкнутой автоматической системы
Рассмотрим стандартную структурную схему ЗАУ (в общем виде)

Для решения различного рода задач АУ используют различные ПФ
2.4.1. ПФ разомкнутого контура ЗАС, т.е. без учета обратной связи
Определяется как отношение изображения по Лапласу управляемой величины системы к изображению ее ошибки, т.е.
![]()
![]()
2.4.2. ПФ ЗАС
Обозначается
![]()
Процесс управления характеризуется зависимостью управляемой величины y(t) от задающего воздействия.
![]()
![]()
![]()
![]()
![]()
![]()
И наоборот
![]()
2.4.3. ПФ для ошибки по заданному воздействию
В основном используется при оценке точности С. Рассматриваются только для замкнутых С
![]()
или
![]()
2.4.4. ПФ для ошибки по помехе
Всякая реальная АС работает в условиях помех (шумы усилителя, помехи дискриминатора). Помеха может быть приложена к любой точке системы (в отличие от задающего воздействия, которое прикладывается только ко входу системы)
Обозначим v(t)
Рассмотрим структурную схему ЗАС с аддитивной помехой.
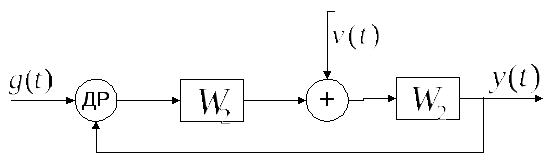
Так как помеха может быть в любой точке,
в общем виде,
![]() - ПФ той части ЗАС, которая не подвержена
помехе,
- ПФ той части ЗАС, которая не подвержена
помехе,
![]() - ПФ той части ЗАС, на которую влияет
помеха.
- ПФ той части ЗАС, на которую влияет
помеха.
Следовательно, перед Ф разомкнутая
структура
![]()
Так как помеха обычно аддитивна, а рассматриваемые САУ линейны, можно рассмотреть прохождение помехи через С независимо от сигнала.
Пусть
![]() ,
т.е. на систему действует только помеха
,
т.е. на систему действует только помеха
![]()
Необходимо определить ПФ для ошибки по помехе.
![]()
Можем преобразовать структурную схему
ЗАС с обратной связью с ПФ
![]() ,
а входное воздействие в этом случае –
v(t)
,
а входное воздействие в этом случае –
v(t)

См. п. 2.3.3 для звена с ОС
![]()
В частном случае, если помеха действует прямо на вход системы:
![]() -
просто ПФ ЗАС
-
просто ПФ ЗАС