Раздел 3. Типовые динамические звенья
Как мы уже говорили в подразделе 2.3, любую САУ мы представляем как набор отдельных звеньев, соединенных между собой определенным образом.
В предыдущем разделе мы успешно рассмотрели способы описания линейны САУ и их математический аппарат
Как известно, основа математического описания любого элемента автоматики – дифференциальное уравнение, отражающее взаимосвязь входной и выходной величин
Мы в рамках нашего курса ограничимся рассмотрением д.у. 1 и 2 порядка: на практике этого, как правило, достаточно.
![]()
Здесь, как известно
![]() ,
любые
,
любые
![]() и
и
![]() могут быть нулевыми
могут быть нулевыми
Устройства, описываемые одинаковыми д.у. относятся к одному типу звеньев
Основные виды встречающихся в теории управления звеньев
-
Позиционные
-
Дифференцирующие
-
Интегрирующие
3.1. Позиционные звенья
К позиционным звеньям относятся
1. звено безынерционное
2. звено апериодическое 1 порядка
3. звено апериодическое 2 порядка
Основным признаком позиционных звеньев является то, что их переходная характеристика в любой момент времени ограничена
![]() ,
при
,
при
![]()
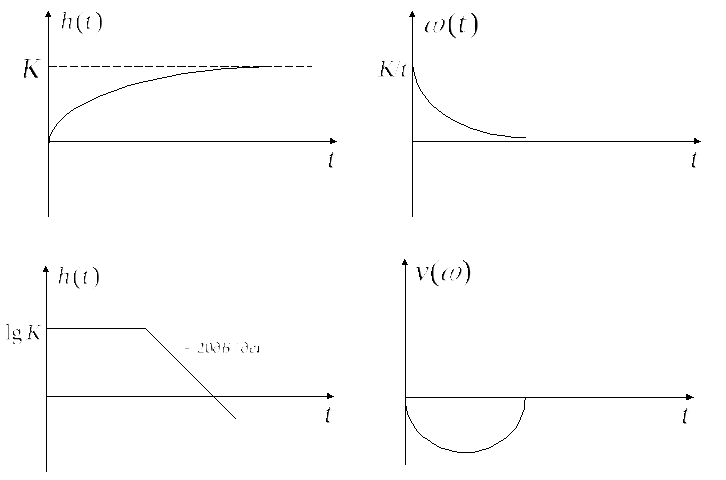
Рассмотрение позиционных звеньев начнем с апериодического звена 1 порядка
-
Передаточная функция имеет вид:
![]() ,
,
где
![]() - коэффициент передачи
- коэффициент передачи
![]() - пост. Времени
- пост. Времени
К таким звеньям относятся усилитель мощности, исполнительный двигатель, фильтр нижних частот (RC)
-
Безынерционные звенья описываются передаточной функцией
![]()
Модно рассмотреть безынерционное звено
как апериодическое 1 порядка, при
![]()
Примеры: широкополосный усилитель, дискриминатор, редуктор.
![]()
![]()
![]()
![]()
-
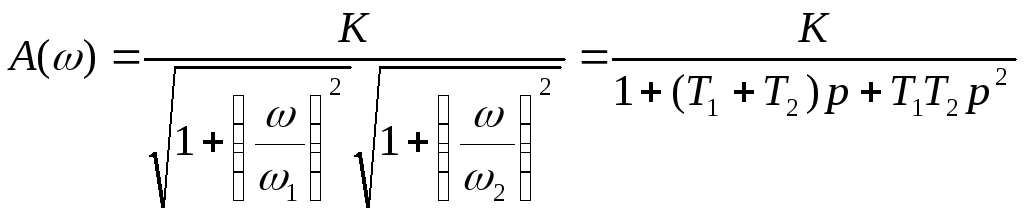
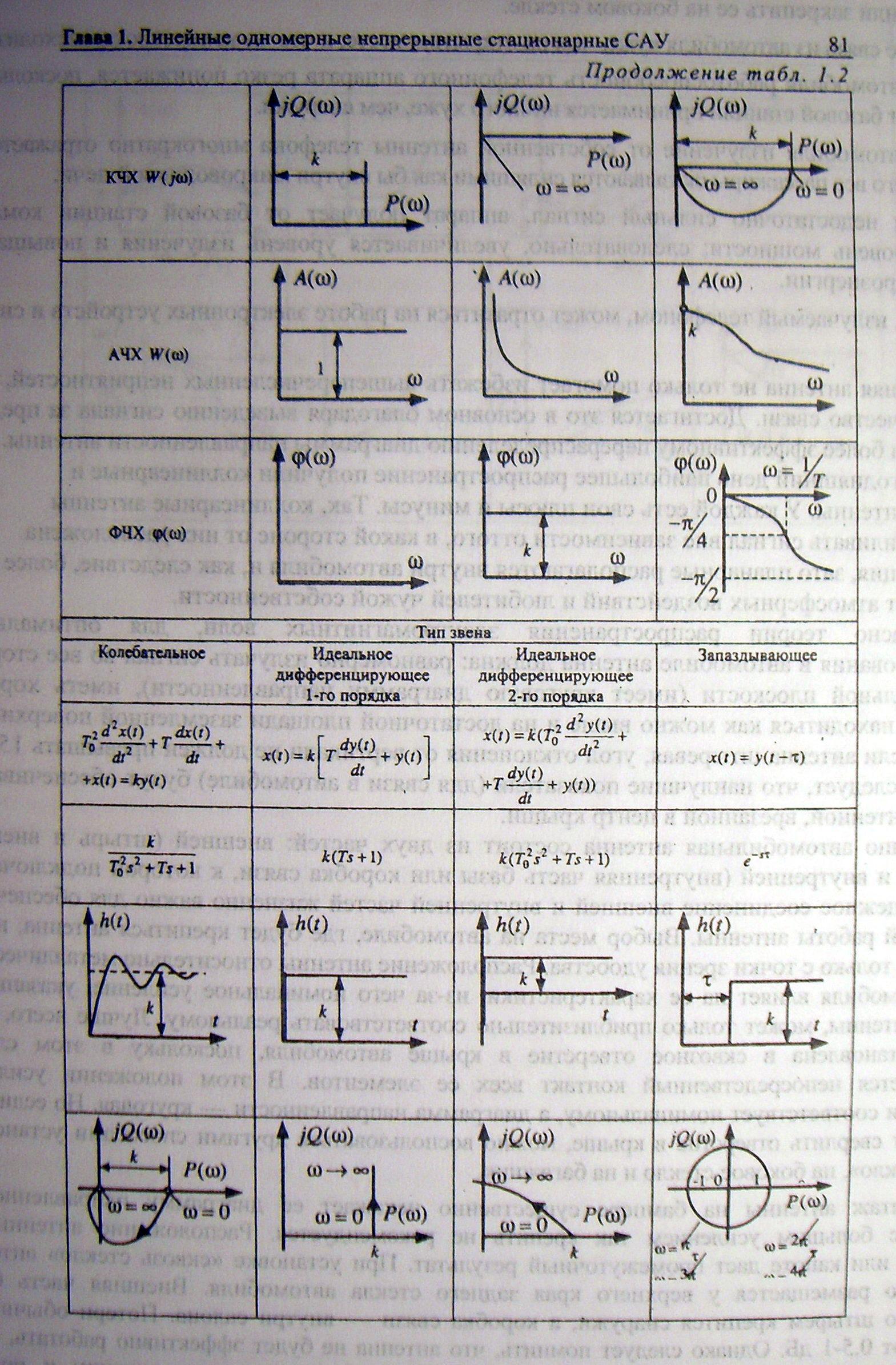
Апериодическое звено 2 порядка описывается ПФ:
![]()
![]()
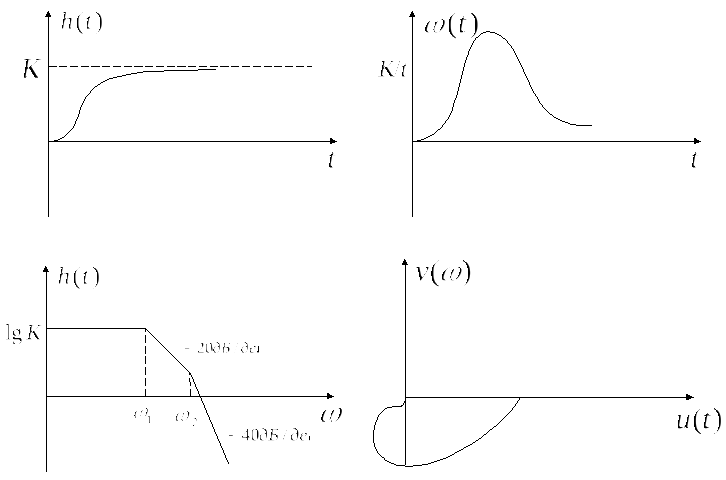
Колебательное звено описывается ПФ
![]()
![]() - коэффициент затухания
- коэффициент затухания
Если
![]() ,
то это – апериодическое звено 2 порядка.
,
то это – апериодическое звено 2 порядка.
Корни знаменателя – вещественные
Когда
![]() корни
характеристического уравнения мнимые.
корни
характеристического уравнения мнимые.
3.2. Дифференцирующие звенья
3.2.1. Идеальное дифференцирующее звено
![]()
Пример: тахогенератор: напряжение на выходе пропорционально скорости вращения. Следовательно, производной угла поворота.
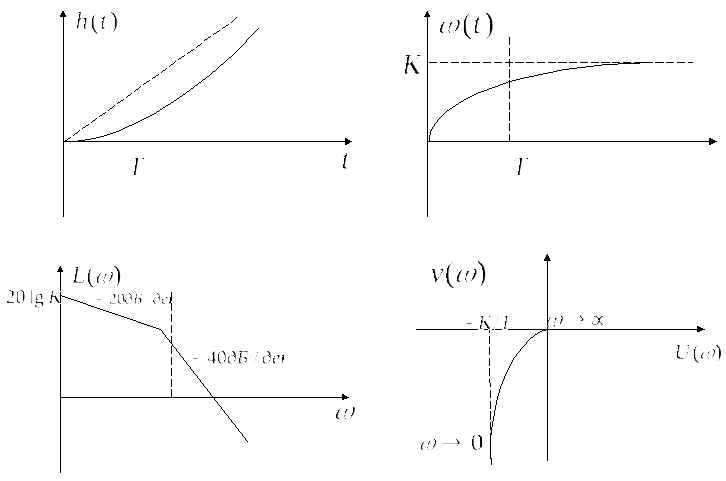
3.2.2. Дифференцирующее звено с замедлением
(Инерционное дифференцирующее звено)
![]()
3.3. Интегрирующие звенья
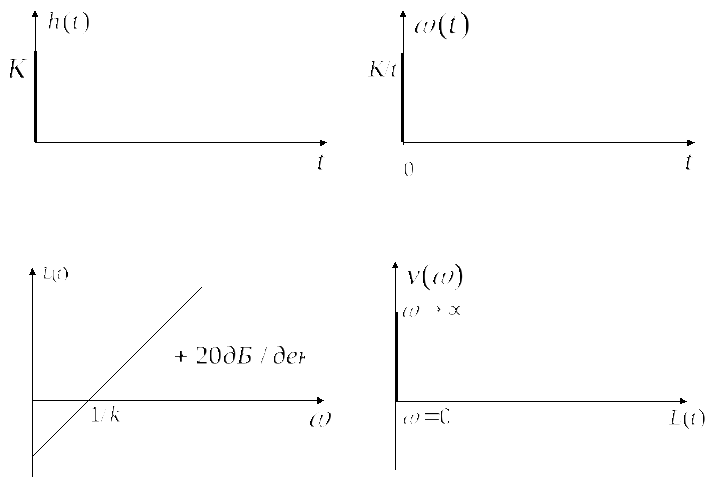
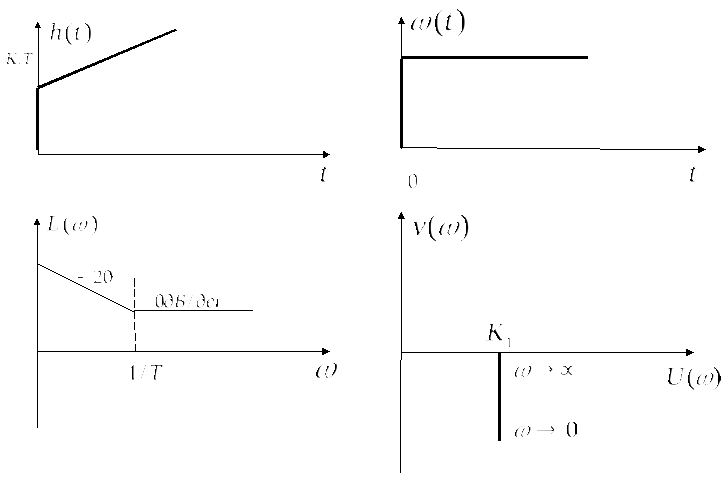
3.3.1. Идеальное интегрирующее звено
![]()
![]()
![]()
Т.е. передаточная функции я такого звена
![]()
Редуктор. Если рассматривать как входную величину скорость вращения а выходную угол поворота
![]()
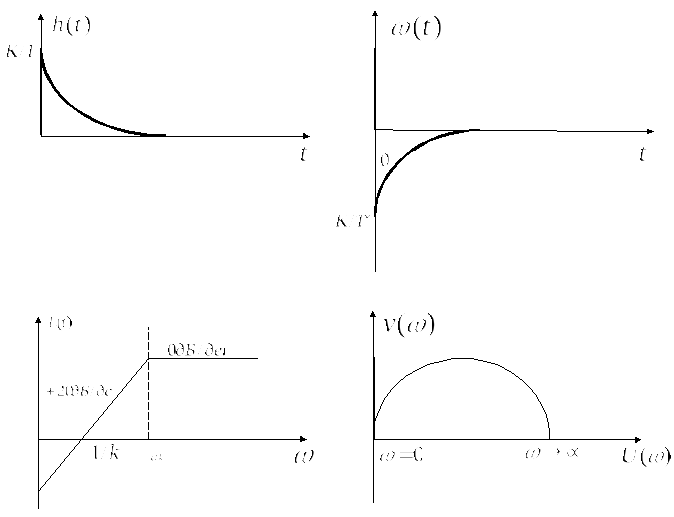
3.3.2. Интегрирующее звено с замедлением
(инерционное интегрирующее звено)
Можно рассмотреть как результат последовательного соединения апериодического и идеального интегрирующего звеньев.
Исполнительные двигатель, если входная величина – управляющее напряжение, а выходная – угол поворота оси
![]()
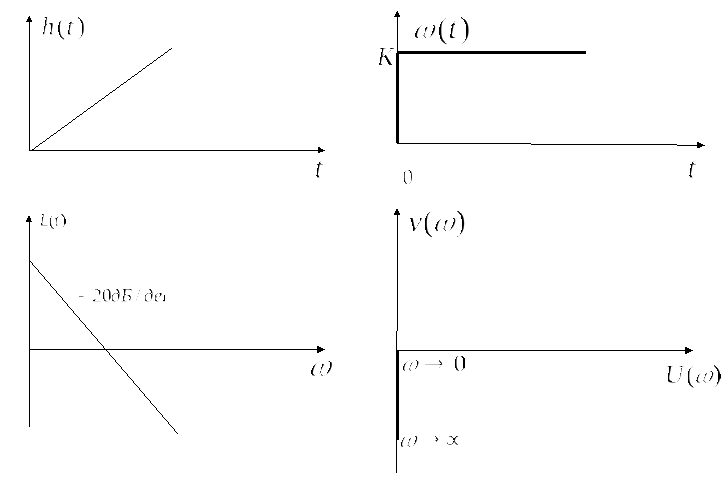
3.3.3. Изодромное звено
Результат параллельного соединения интегрирующего и безынерционного звеньев
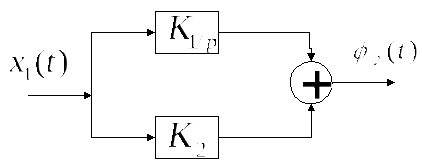
![]()
Применяется для динамической коррекции САУ, для повышения качества их работы. Введение двух идеальных интеграторов невозможно из-за потери устойчивости. Если необходимо – вводят идеальное интегрирующее и изодронное звенья.

Возможность белее глубоко и полно анализировать функционирование САУ в реальных условиях дает применение статистических методов исследования САУ.
Практическая значимость этих методов реализовалась с развитием вычислительной техники, давшей возможность реализации сложных алгоритмов анализа и синтеза САУ.
Все статистические методы исследования основываются на математических моделях динамических систем, сигналов, помех, информационных и сопутствующих процессов.
Формирование математической модели начинается с введения системы координат и определения пространства состояний (или фазового пространства)
Понятие пространства состояний процесса или динамической системы соответствует заданной минимально необходимой совокупности параметров, содержащих вся информация о состоянии процесса или системы данный момент времени и дающих возможность судить об их поведении в будущем.
Сами параметры при этом называются параметрами состояния.
Описание процессов и систем в пространстве состояний возможно для:
- гауссовских и негауссовских
- линейных нелинейных
- непрерывных и декретных .
Совокупность переменных состояния есть вектор состояния.
Пусть задана динамическая система, описываемая дифференциальным уравнением
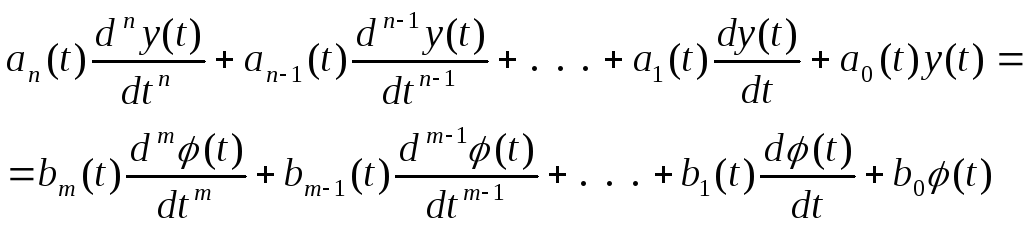
Где
![]() и
и
![]() входной
и выходной сигналы.
входной
и выходной сигналы.
Задаются начальные условия в момент
времени
![]() :
:
![]() ,
,![]() ,
,![]()
Для рассматриваемой системы в качестве
переменных состояния можно принять
собственно величину
![]() и n-1 ее производных,
которые при заданных уравнении и
начальных условиях полностью определяют
состояние системы
и n-1 ее производных,
которые при заданных уравнении и
начальных условиях полностью определяют
состояние системы
В этом случае вектор состояния имеет вид:
![]()
Типовые задачи теории САУ – задачи анализа и синтеза
Статистическая формулировка задачи анализа: даны характеристики исследуемой динамической системы и процессов, действующих на входе; требуется определить характеристики процессов на выходе системы.
Статистическая формулировка задачи синтеза: даны характеристики входных процессов и требуемые характеристики процессов на выходе. Требуется определить облик динамической системы, которая бы наилучшим образом преобразовывала заданные входные процессы в выходные.
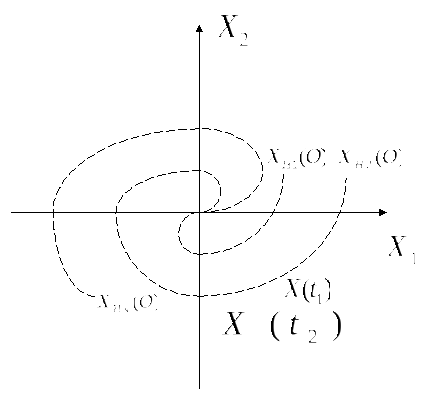
Пространство состояний можно интерпретировать графически ортогональным пространством размерности n
Состоянию системы в произвольный момент
времени t соответствует
конкретная точка пространства состояний
![]() изображающая точки системы.
изображающая точки системы.
С изменением времени эта точка описывает некоторую траекторию, называемой фазовой траекторией С.
Совокупность фазовых траекторий, полученных из различных начальных условий, называют фазовым портретом системы.
ФП позволяет оценить свойства системы.