

1.3. Частные случаи движения точки
-
Равнопеременное движение.
Если
![]() т.е. ускорение не меняется как по величине,
так и по направлению, то движение называют
равнопеременным.
В этом случае
т.е. ускорение не меняется как по величине,
так и по направлению, то движение называют
равнопеременным.
В этом случае
(вывод)
 (3.1)
(3.1)
где
![]() -
начальная скорость, а
-
начальная скорость, а
![]() -
начальное перемещение. В этом случае
-
начальное перемещение. В этом случае
![]()
![]() ср.
ср.
Отметим, что при
решении задач начальное перемещение![]() всегда можно сделать равным нулю,
поместив начало отсчета в начало
движения.
всегда можно сделать равным нулю,
поместив начало отсчета в начало
движения.
-
Прямолинейное равномерное движение.
Если
![]() =
const,
то движение называют равномерным.
=
const,
то движение называют равномерным.
В
случае прямолинейного равномерного
движения не меняется и направление
скорости, т.е.
![]() =
=![]() =
=![]() ср
(
ср
(![]() ).
Тогда уравнения (3.1)
упрощаются и принимают вид
).
Тогда уравнения (3.1)
упрощаются и принимают вид
 (3.2)
(3.2)
После проектирования на ось ОХ сонаправленную с перемещением получим
vx=vox,
![]() . (3.3)
. (3.3)
-
Прямолинейное равнопеременное движение.
ax=const.
 В
этом случае справедливы общие уравнения
равнопеременного движения (3.1). После
проектирования на ось ОХ сонаправленную
с перемещением и начальной скоростью
они принимают вид
В
этом случае справедливы общие уравнения
равнопеременного движения (3.1). После
проектирования на ось ОХ сонаправленную
с перемещением и начальной скоростью
они принимают вид


На рис.4.2 изображены графики зависимостей ах(t), vх(t), х(t) при равноускоренном (ах>0, случай а), равномерном (ах=0, случай б) и равнозамедленном (ах<0, случай в) движении при х0=0, v0=0.
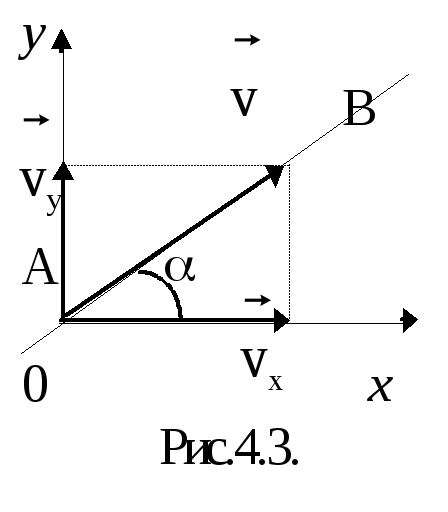
![]() вдоль произвольной прямой АВ (рис.4.3),
можно разложить на два независимых
равномерных и прямолинейных движения
вдоль осей ОХ и ОY со скоростями vx
и vy:
х= хоvxt,
y= yovyt,
где vx=v
cos
, vy=v sin
.
вдоль произвольной прямой АВ (рис.4.3),
можно разложить на два независимых
равномерных и прямолинейных движения
вдоль осей ОХ и ОY со скоростями vx
и vy:
х= хоvxt,
y= yovyt,
где vx=v
cos
, vy=v sin
.
Скорость тела в
любой точке траектории
![]()
![]() и
направлена вдоль траектории движения.
И наоборот, если движение состоит из
нескольких движений со скоростями
и
направлена вдоль траектории движения.
И наоборот, если движение состоит из
нескольких движений со скоростями
Последнее выражение называют правилом сложения скоростей.
1.4. Криволинейное движение точки

Криволинейное движение – движение, при котором траектория – кривая линия. Если материальная точка движется по произвольной кривой, то эту кривую можно разбить на малые дуги и каждую из них совместить с дугой некоторой окружности. Каждая такая окружность называется окружностью кривизны, а радиус называется радиусом кривизны траектории в данной точке.
Поэтому достаточно рассмотреть движение материальной точки по окружности.
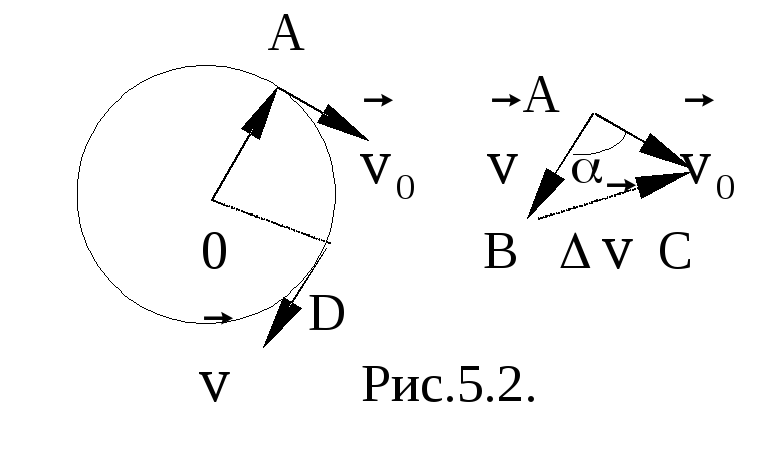
![]() |=const,
но изменяется по направлению (см.
рис.5.2). В этом случае
|=const,
но изменяется по направлению (см.
рис.5.2). В этом случае ![]() 0,
поэтому материальная точка движется с
ускорением (т.к.
0,
поэтому материальная точка движется с
ускорением (т.к.
![]() ).
Рассмотрим треугольник АВС.
Он равнобедренный со стороной |
).
Рассмотрим треугольник АВС.
Он равнобедренный со стороной |![]() |=v
и основанием v,
причем
|=v
и основанием v,
причем
![]() .
Если точка D стремится к точке А, то угол
в вершине АВС
0.
Но углы при основании АВС
равны (равнобедренный). Так как сумма
всех углов АВС
равна 1800,
то углы при основании будут стремиться
к 900 каждый,
то есть в пределе
.
Если точка D стремится к точке А, то угол
в вершине АВС
0.
Но углы при основании АВС
равны (равнобедренный). Так как сумма
всех углов АВС
равна 1800,
то углы при основании будут стремиться
к 900 каждый,
то есть в пределе
![]() ,
тогда и ускорение будет перпендикулярно
вектору скорости (
,
тогда и ускорение будет перпендикулярно
вектору скорости (![]() )
и направлено к центру окружности. Длина
вектора |
)
и направлено к центру окружности. Длина
вектора |![]() |=
|=![]() .
Длина дуги DA=
.
Длина дуги DA=![]() ,
а время, за которое точка пройдет этот
путь
,
а время, за которое точка пройдет этот
путь
![]() .
Тогда модуль среднего ускорения
.
Тогда модуль среднего ускорения
 .
Используя первый замечательный предел
.
Используя первый замечательный предел
![]() ,
определим мгновенное ускорение:
,
определим мгновенное ускорение:
![]() ,
то есть
,
то есть
![]() .
.

2 случай. Скорость движущейся по окружности материальной точки изменяется по величине и направлению: .
![]() –полное
изменение скорости;
–полное
изменение скорости;
![]() – изменение скорости по направлению,
– изменение скорости по направлению,
![]() – изменение скорости по величине. Из
CED
– изменение скорости по величине. Из
CED
![]() .
Поделим обе части этого равенства на
.
Поделим обе части этого равенства на
![]() перейдем к пределу:
перейдем к пределу:
 .
.
![]() .
.
Первое слагаемое
является нормальным ускорением, второе
![]() – тангенциальное ускорение, направленное
по касательной к траектории. Его величина
– тангенциальное ускорение, направленное
по касательной к траектории. Его величина
![]() .
.

![]() –
если движение ускоренное;
–
если движение ускоренное;
![]() – если движение замедленное (рис.5.4).
– если движение замедленное (рис.5.4).
Итак, при любом криволинейном движении полное ускорение можно представить в виде двух составляющих:
-
нормальное ускорение
 –
характеризуется изменением скорости
по направлению;
–
характеризуется изменением скорости
по направлению;
-
тангенциальное ускорение
 характеризуется изменением скорости
по величине. Так как компоненты
характеризуется изменением скорости
по величине. Так как компоненты
 и
и
 взаимно перпендикулярны, то
взаимно перпендикулярны, то
![]()
ρ – кривизна траектории в данной точке.
Найти полное
ускорение – это значит найти не только
его величину, но и его направление в
пространстве:
![]() ,
или
,
или
![]() .
.