

2.12.1. Изменение скольжения
Этот способ используют в приводе тех механизмов, где установлены асинхронные двигатели с фазным ротором. Например, в приводе подъемно-транспортных машин. В цепь фазного ротора вводится регулировочный реостат. Увеличение активного сопротивления ротора не влияет на величину критического момента, но увеличивает критическое скольжение (рис. 2.21).
Н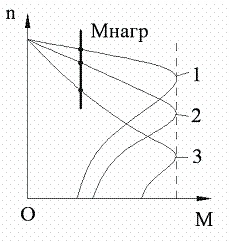 а
рис. 2.21 приведены механические
характеристики асинхронного двигателя
при разных сопротивлениях регулировочного
реостата Rр3>Rр2>0,Rр1=0.
а
рис. 2.21 приведены механические
характеристики асинхронного двигателя
при разных сопротивлениях регулировочного
реостата Rр3>Rр2>0,Rр1=0.
при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа:
-
Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т.е. способ неэкономичный.
-
Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т.е. снижается устойчивость работы двигателя.
-
Невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
2.12.2. Изменение числа пар полюсов
Эти двигатели (многоскоростные) имеют более сложную обмотку статора, позволяющую изменять ее число пар полюсов, и короткозамкнутый ротор. При работе асинхронного двигателя необходимо, чтобы обмотки ротора и статора имели одинаковое число пар полюсов. Только короткозамкнутый ротор способен автоматически приобретать то же число пар полюсов, что и поле статора. Многоскоростные двигатели нашли широкое применение в приводе металлорежущих станков. Нашли применение двух, трех и четырех скоростные двигатели.
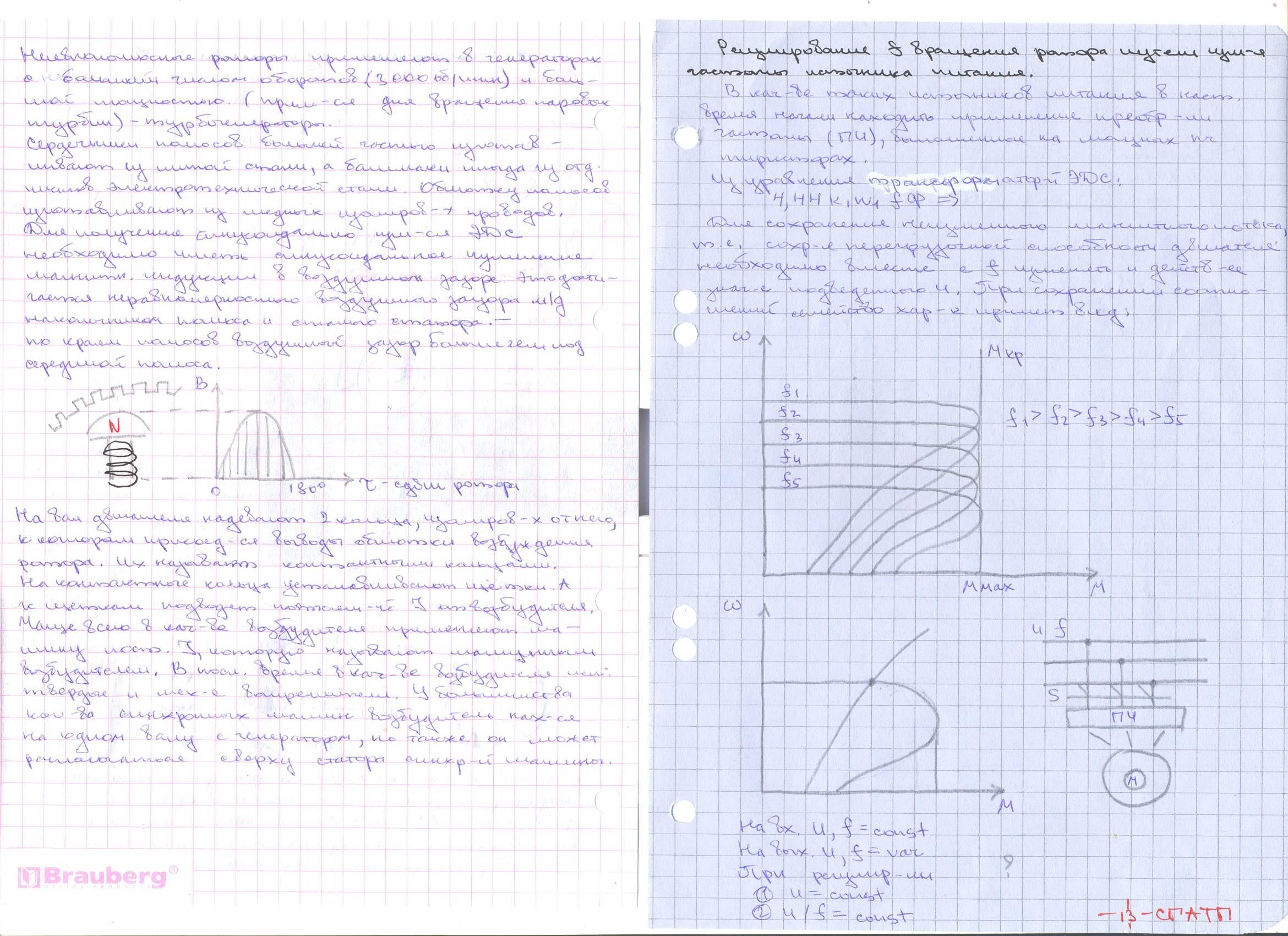
2.12.3. Изменение частоты источника питания
В качестве таких источников питания в
настоящее время начали находить
применение преобразователи частоты
(ПЧ), выполняемые на мощных полупроводниковых
приборах – тиристорах. Из уравнения
трансформаторной ЭДС E=4,44w1k1fΦ
следует, что для сохранения неизменным
магнитного потока, т.е. для сохранения
перегрузочной способности двигателя,
необходимо вместе с частотой изменять
и действующее значение подведенного
напряжения. При выполнении соотношения
U1/f1=U'1/f'1, критический момент не изменяется
и получается семейство механически
характеристик, представленное на рис.
2.24.
качестве таких источников питания в
настоящее время начали находить
применение преобразователи частоты
(ПЧ), выполняемые на мощных полупроводниковых
приборах – тиристорах. Из уравнения
трансформаторной ЭДС E=4,44w1k1fΦ
следует, что для сохранения неизменным
магнитного потока, т.е. для сохранения
перегрузочной способности двигателя,
необходимо вместе с частотой изменять
и действующее значение подведенного
напряжения. При выполнении соотношения
U1/f1=U'1/f'1, критический момент не изменяется
и получается семейство механически
характеристик, представленное на рис.
2.24.
Рис. 2.24. Механические характеристики при частотном регулировании
Достоинства этого способа: плавное регулирование, возможность повышать и понижать частоту вращения, сохранение жесткости механических характеристик, экономичность. Основной недостаток – требуется преобразователь частоты, т.е. дополнительные капитальные вложения.
5) Устройство синхронной машины
Синхронная машина – это электрическая машина переменного тока частота вращения ротора которой равна частоте вращения магнитного поля в воздушном зазоре. СМ получили широкое распространение в промышленности для электроприводов, работающих с постоянной скоростью (компрессоров, насосов, приводов задвижек и тд) В последнее время вследствие появления преобразовательной полупроводниковой техники разрабатываются регулируемые синхронные электроприводы.
Устройство синхронной машины
Статоры синхронной и асинхронной машин одинаковы.
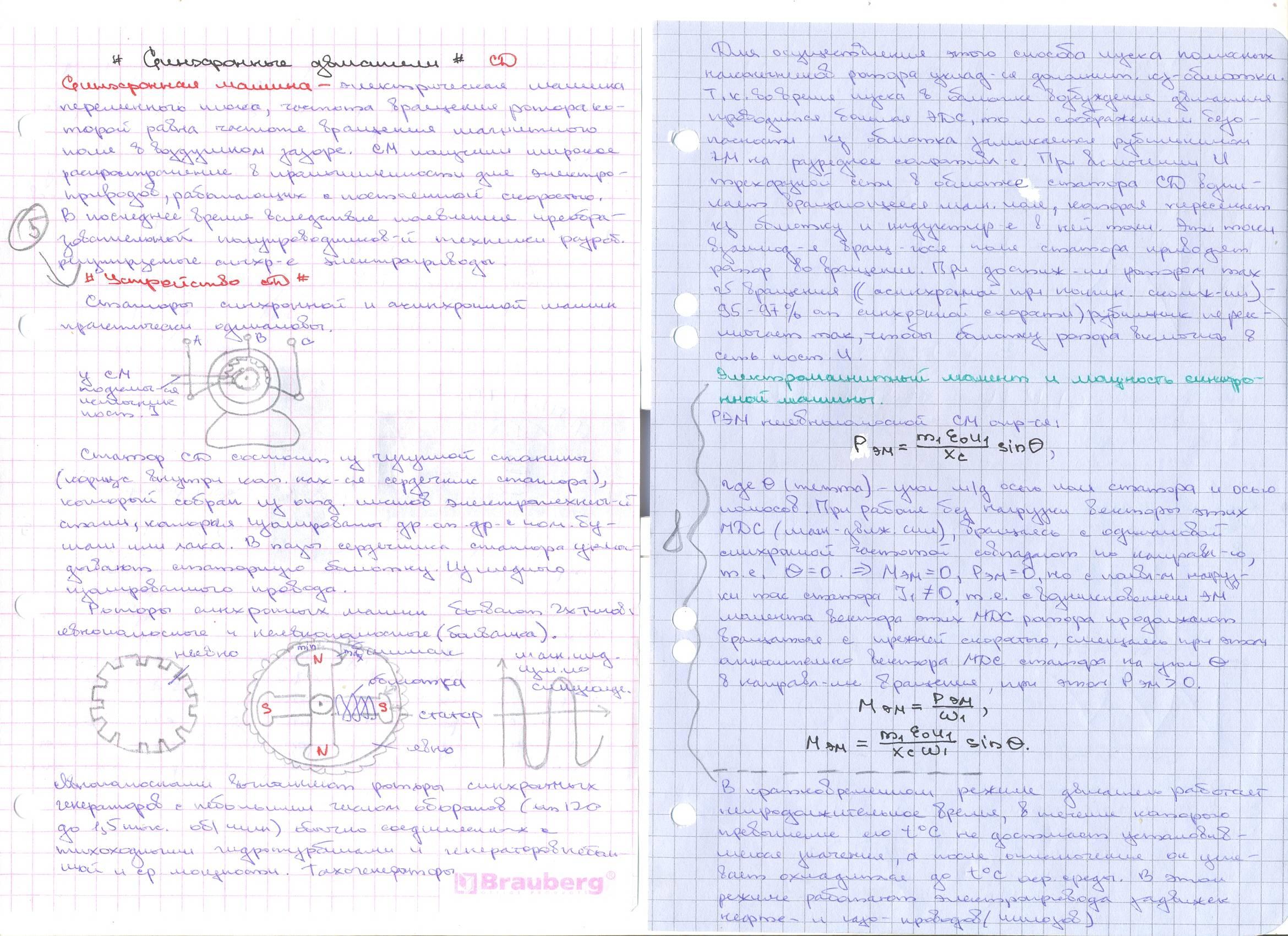
Статор синхронного двигателя состоит из чугунной станины – корпус внутри которого находится сердечник статора, который собран из отдельных листов электротехнической стали, которые изолированы друг от друга с помощью бумаги или лака. В пазы сердечника статора укладывают статорную обмотку из медного изолированного провода.
Роторы синхронных машин бывают двух типов: явнополюсные и неявнополюсные.
Неявнополюсные роторы получили название в народе – болванка.
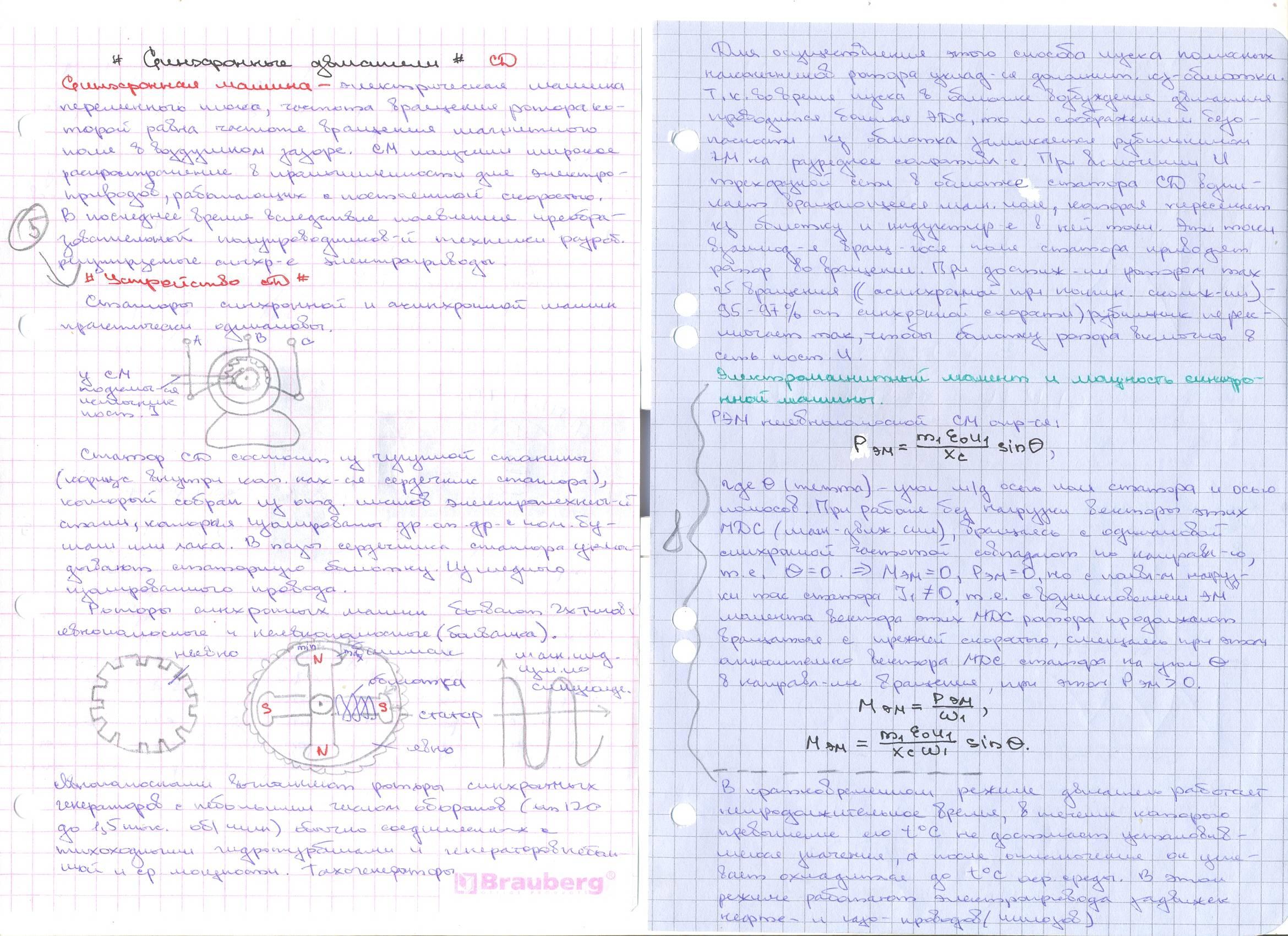
Явнополюсными выполнят роторы синхронных генераторов с небольшим числом оборотов 120-1500об\мин, обычно соединяемых с тихоходными гидротурбинами для генераторов небольшой и средней мощности.
Неявнополюсные роторы – применяют в генераторах с большим числом оборотов(3000об\мин) и большой мощности, применятся для вращения паровых турбин. Эти генераторы часто называются турбо-генераторами.
Сердечники полюсов большей частью изготавливают из литой стали, а башмаки – иногда из отдельных листов электротехнической стали.
Обмотку полюсов изготавливают из медных изолированных проводов.
Для получения синусоидально изменяющейся ЭДС необходимо иметь синусоидальное распределение магнитной индукции в воздушном зазоре, это достигается неравномерностью воздушного зазора между наконечником полюса и сталью статора – по краям полюсов воздушный зазор больше чем от середины полюса.
На вал двигателя надевают два кольца, изолированные от него, к которым присоединяются выводы обмотки возбуждения ротора, их называют контактными кольцами. На контактные кольца устанавливают щетки, а к щеткам подводят постоянный ток от возбудителя. Чаще всего в качестве возбудителя применяют машину постоянного тока, которую называют машиной-возбудителем.
В последнее время в качестве возбудителя используют твердые и механические выпрямители. У большинства количества синхронных машин возбудитель находится на одном валу с генератором, но также он может располагаться сверху статора синхронной машины.