

9. Функциональные потенциометры
Функциональные потенциометры, являющиеся носителями заданной программы или заданной функции в системах автоматики, характеризуются определенной зависимостью
Rx = f(x). Зависимость Uвых = φ(x) так же, как и у линейных потенциометров, при сопротивлении нагрузки Rн, соизмеримом с сопротивлением потенциометра, будет отличаться от зависимости Rx = f(x).
Поскольку при разработке систем автоматики заданным является зависимость
Uвых
= φ(x),
то при расчете потенциометра необходимо
по заданной функции и принятому
коэффициенту нагрузки найти функцию Rx
= f(x)
и по этой функции определить необходимый
профиль каркаса потенциометра.
найти функцию Rx
= f(x)
и по этой функции определить необходимый
профиль каркаса потенциометра.
Приближенно можно принять, что высота каркаса Н функционального потенциометра меняется пропорционально производной от функции Rx = f(x), т.е.
 .
.
Для наиболее часто встречающихся функций форма каркасов потенциометров приведена на рис.13.
Вследствие
сложности намотки профильных потенциометров
и невозможности получения профиля при
 в большинстве случаев вместо профильных
потенциометров применяют к ступенчатые.
в большинстве случаев вместо профильных
потенциометров применяют к ступенчатые.
Это
замена основана на том, что кривая Rx
= f(x)
заменяется отрезками прямых
(аппроксимируется) таким образом, чтобы
максимальное значение ошибки
 не превышало определенной величины.
не превышало определенной величины.
При этом функциональный потенциометр как бы делится на несколько линейных потенциометров.
Датчики перемещения с изменяющейся индуктивностью (индуктивные датчики)
В
данной группе датчиков изменяющимся
параметром управляемой цепи является
индуктивное сопротивление Х =
 ,
где
,
где
 -
частота переменного тока; Lx
– индуктивность датчика, изменяющаяся
при перемещении подвижной системы
датчика.
-
частота переменного тока; Lx
– индуктивность датчика, изменяющаяся
при перемещении подвижной системы
датчика.
Эти
системы применяются лишь на переменном
токе, величина которого будет изменяться
при изменении Х =
 .
.
Простейшим
датчиком данной группы является дроссель
и изменяющимся воздушным зазором
 или изменяющейся площадью его поперечного
сечения (Sв
= var) (рис.14).
или изменяющейся площадью его поперечного
сечения (Sв
= var) (рис.14).
Индуктивность дросселя при ненасыщенном магнитопроводе может быть выражена следующей формулой:

где
 -
число витков обмотки дросселя;
-
число витков обмотки дросселя;
 - магнитное
сопротивление сердечника и якоря;
- магнитное
сопротивление сердечника и якоря;
 -
длина воздушного зазора, м;
-
длина воздушного зазора, м;
Sв – площадь поперечного сечения воздушного зазора, м2.
Для тока и тангенса угла сдвига фаз в цепи нагрузки имеем:

 İ
=
İ
=
 ,
,
 ,
,
где R – активное сопротивление обмотки дросселя;
Zн
= Rн + ј - полное (комплексное) сопротивление
нагрузки.
- полное (комплексное) сопротивление
нагрузки.
Таким
образом, при изменении длины
 или площади поперечного сечения Sв
– воздушного зазора будет изменяться
величина тока и угол сдвига фаз между
векторами напряжения тока.
или площади поперечного сечения Sв
– воздушного зазора будет изменяться
величина тока и угол сдвига фаз между
векторами напряжения тока.
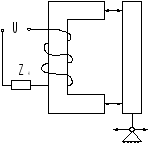
Рис.14
Обычно применяют дифференциальную или мостовую схемы включения датчика.
Дифференциальная схема включения подобной системы с двумя дросселями показана на рис.15-а, а мостовая - на рис.15-б.
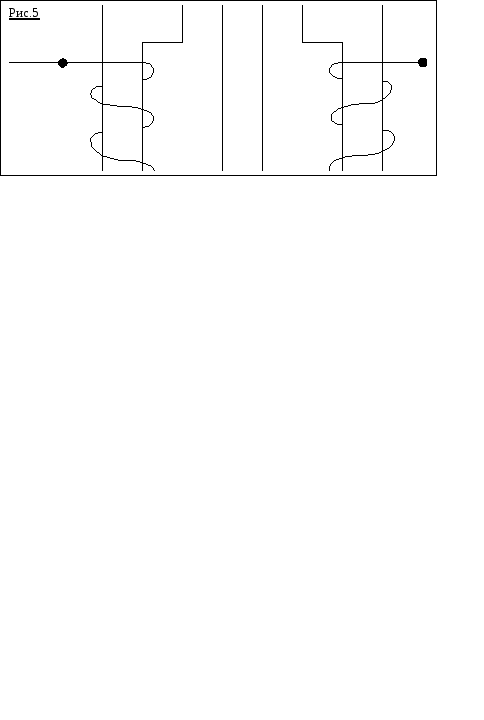

а) б)
0
Рис.15
Пример 1:
Определить индуктивность датчика, имеющего 18000 витков, = 5мм и площадь торца магнитопровода 400 мм2

L = 2 : 5*3.14*180002*400*10-10 =1603 Гн
Пример 2:
Определить число витков и диаметр провода, который надо намотать на датчик с площадью торца магнитопровода 180 мм2,чтобы при воздушном зазоре = 3мм по обмотке протекал ток 100 мА. Допустимая плотность тока jдоп=2,5 А/мм2, датчик питается от сети
220 В, f = 100 Гц.
Для того, чтобы определить число витков и диаметр провода, нужны формулы:
 ,
,  ,
,  ,
, 
.
 ,
, 
 мм
мм
Датчики перемещения с изменяющейся емкостью
Емкостной датчик
представляет собой одну или несколько
емкостей с изменяющимися параметрами.
Ёмкость зависит от площади обкладок
конденсатора S,
расстояния между ними d
и диэлектрической проницаемостью
диэлектрика .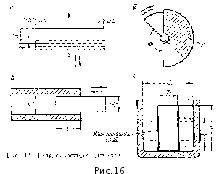
В различных датчиках, применяющихся для контролирования какой-либо неэлектрической величины, может меняться один из указанных параметров
На рис.16,а представлен датчик из двух параллельных пластин, применяющийся для измерения небольших смещений. В данном датчике переменой величины является расстояние между пластинами.
Для преобразования угловых перемещений в изменение емкости применяются поворотные датчики (рис.16,б), в которых переменной величиной является площадь конденсатора. Для увеличения емкости датчика обычно берут не одну пару пластин, а систему, состоящую из нескольких неподвижных и подвижных пластин. Примером такого датчика может явиться обычный воздушный конденсатор переменной емкости, применяемый в радиотехнике.
Для измерения перемещений применяются цилиндрические емкостные датчики (рис.16,в) с переменой площадью.
В датчиках для измерения уровня жидкости (рис.16,г) и сыпучих тел переменной величиной является диэлектрическая проницаемость.
Важнейшими характеристиками емкостных датчиков являются величина емкости датчика и его чувствительность.
Расчет емкости датчиков производится по формулам, отражающим соотношение величины емкости, геометрических размеров датчика и диэлектрической постоянной среды между обкладками конденсатора.
Чувствительность датчика выражается величиной приращения емкости при изменении контролируемой неэлектрической величины на единицу ее измерения. Чувствительность находят дифференцированием выражения для емкости по переменной неэлектрической величине (по смещению, углу поворота, высоте уровня).
Расчетная формула
Плоскопараллельный
датчик для измерения смещений.
Зависимость емкости от величины смещения
 (см.
рис.16 а) выражается формулой
(см.
рис.16 а) выражается формулой
 , (9.1)
, (9.1)
где С – емкость датчика, пф;
 величина
смещения, т. е. величина изменения зазора
между пластинами, мм;
величина
смещения, т. е. величина изменения зазора
между пластинами, мм;
d
– зазор между пластинами при
 =
0, мм;
=
0, мм;
S – площадь пластин, см2 .
В
этой формуле предлагается, что между
пластинами находится воздух, т.е.
 .
.
Чувствительность такого датчика
 ,
,