

2.1.3 Расчет ускорений
Расчет ускорений проводится для двух положений рабочего хода механизма, в которых сила полезного сопротивления не равна нулю. Ускорения определяются подобно скоростям, расчет которых был проделан выше (п. 2.1.2). В данном курсовом проекте рассчитываются линейные и угловые ускорения в положениях механизма №2 и №3.
Первоначально определим ускорение точки А кривошипа. Оно является постоянным и вычисляется по формуле:
![]() .
(2.3)
.
(2.3)
![]() м/с2.
м/с2.
Нахождение ускорений будем производить методом планов, для этого запишем векторное уравнение ускорения точки В:
 (2.4)
(2.4)
где
![]() и
и
![]() -
нормальная и тангенциальная составляющие
ускорения звена АВ соответственно.
-
нормальная и тангенциальная составляющие
ускорения звена АВ соответственно.
Решим
уравнение (2.4) графически. Для этого
примем масштабный коэффициент плана
ускорений
![]() ,
равный:
,
равный:
![]() ,
,
где
![]() мм.
мм.
![]()
![]() .
.
Определим нормальную составляющую ускорения звена АВ:
![]() ,
(2.5)
,
(2.5)
![]() м/с2.
м/с2.
Решение уравнения (2.4) приведено на рис. 2.3.
Отрезок
an, изображающий на
плане ускорений
![]() ,
определяется следующим образом:
,
определяется следующим образом:
![]() ,
,
![]()
Ускорения центров масс определяем по принципу подобия:
![]() ,
,
![]() мм.
мм.
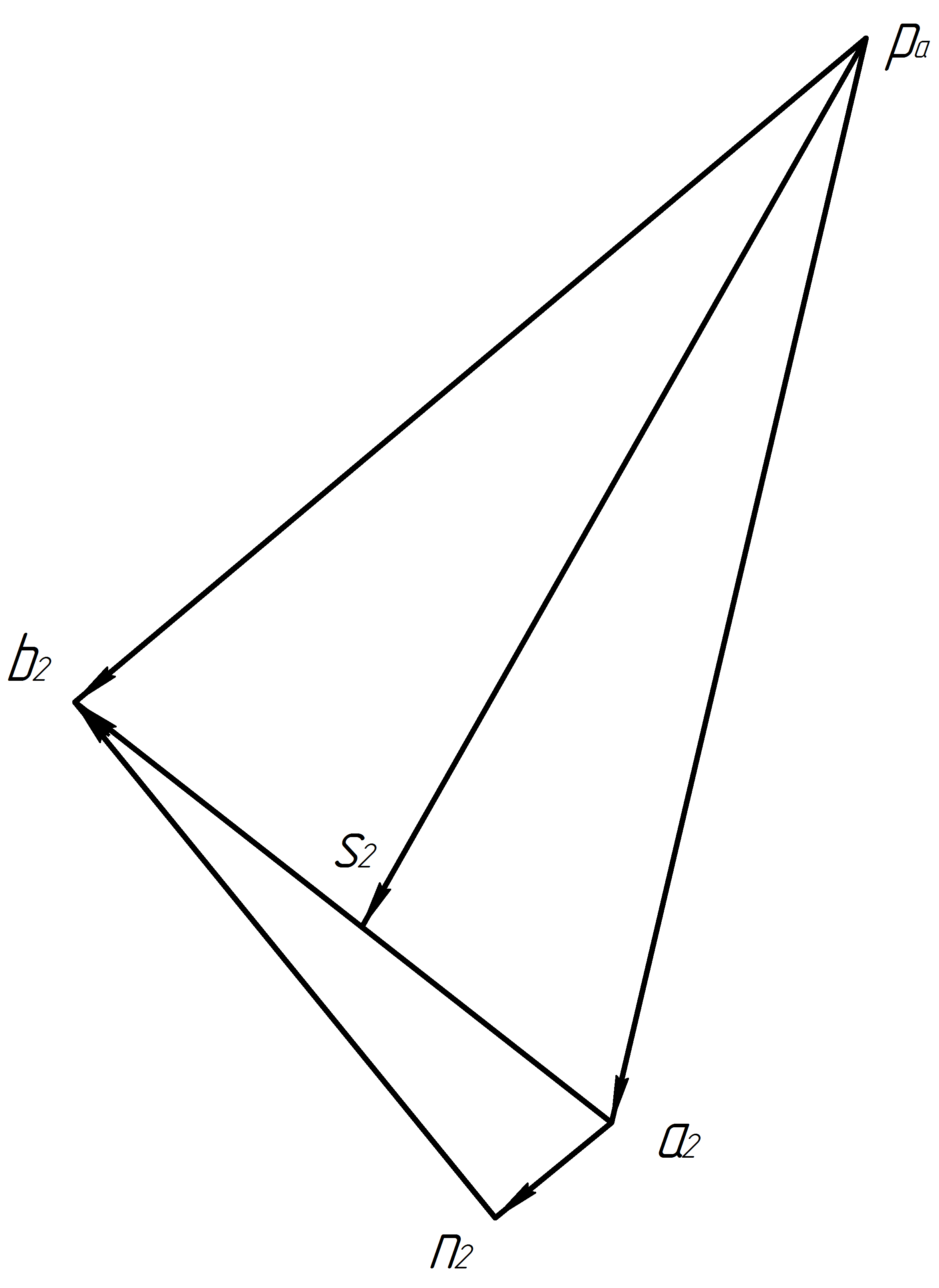
Рис. 2.2. План ускорений для положения №2
Численные значения ускорений вычислим по формулам:
![]() м/с2,
м/с2,
![]() м/с2,
м/с2,
![]() м/с2,
м/с2,
![]() м/с2,
м/с2,
![]() м/с2,
м/с2,
![]() 1/с2,
1/с2,
Полученные значения ускорений для положений механизма №2 и №3 приведены в
таблице 3.
Таблица 3
|
|
aa |
aВ |
aAB |
aτAB |
anAB |
aS2 |
ε2 |
|
|
м/с2 |
1/с2 |
|||||
|
№2 |
155,23
|
216,91 |
143,7 |
140,2 |
31,5 |
215,4 |
70,45 |
|
№3 |
77,04 |
217,77 |
217,5 |
7,3 |
142,9 |
109,3 |
|
-
Кинематический анализ методом диаграмм
Метод кинематических диаграмм позволяет наглядно посмотреть, как изменяются перемещение, скорость и ускорение за цикл работы механизма.
Диаграмма перемещения выходного звена или функция положения механизма строится в зависимости от функции времени. Для построения и дальнейших расчетов выбираем масштабные коэффициенты по оси абцисс
 ,
,
![]() .
.
На графике отрезок на оси абсцисс берем равным 180мм.
Масштабный коэффициент по оси ординат диаграммы перемещений определяется как
![]() .
.
Масштабный коэффициент по оси ординат диаграммы скоростей определяется как
![]()
умножаем на 2, т.к. на диаграмму переносим отрезки, изображающие скорость уменьшенными вдвое.
Масштабный коэффициент по оси ординат диаграммы ускорений определяется как
![]()
После масштабных коэффициентов приступаем к построению диаграммы скоростей в системе координат V(t). Для этого на оси абсцисс откладываем отрезок 0-12 равный 180мм. Затем делим отрезок на 12 частей и отмечаем точки 1, 2,…,12. Проводим ординатные прямые через эти точки и на этих прямых с учетом выбранного масштаба, откладываем скорости, величины которых смотрим по плану скоростей.
По результатам диаграммы скоростей строим кинематическую диаграмму перемещений выходного звена, для этого c учетом выбранного масштаба, откладываем перемещения точки C. Для этого проводим прямые между одноименными, отмеченными ранее точками на диаграмме скоростей, затем параллельно им откладываем на одноименных отрезках прямые на диаграмме ускорений, соединив их плавной кривой, получим диаграмму перемещений.
Диаграмму ускорения точки C строим методом графического дифференцирования, способом хорд .
Проводим хорду, которая соединяет концы начальной и конечной ординат кривой на данном интервале, на диаграмме скоростей.
По оси абсцисс выбираем произвольную точку Н, в данном случае Н=30 мм в качестве полюса. Из этой точки проводим до пересечения с осью ординат луч, параллельный хорде.
Таким же образом рассмотрим все временные интервалы. В результате получим ряд точек, каждая из которых расположена в середине соответствующего интервала. Затем соединяем эти точки плавной кривой и получаем искомый график.
2.3. Сравнение результатов расчетов.
Для
того, чтобы удостовериться в правильности
проведенных расчетов и построения
диаграмм, проводим проверочный расчет
на погрешность
![]()
Для того, чтобы расчеты были верны погрешность не должна превышать 10%
Погрешность
высчитываем по формуле
![]()
Для
положения №2
![]()
Для
положения №3
![]()
Обе погрешности менее 10% , следовательно, расчеты проведены верно.
3. Кинетостатический анализ механизма
Задачи расчета – определение сил, действующих на звенья механизма и в кинематических парах.
В силовом расчёте кинематическую цепь разбивают на группы Ассура, которые являются статически определимыми. Расчёт ведётся путём последовательного рассмотрения условий равновесия каждой группы, начиная с наиболее удаленной от исходного механизма, последним рассчитывается ведущее звено.
3.1. Силовой расчет методом планов
Силовой расчет методом планов позволяет определить реакции в кинематических парах и уравновешивающий момент. Этот метод прост, нагляден и достаточно точен для инженерных расчетов.
3.1.1. Силовой расчет структурной группы II класса 2 порядка
Структурная группа состоит из шатуна АВ и ползуна.
Перенесем
звено АВ с разметки механизма и в точке
А освободим его от связей, отбросив
звено 1 и заменив действие этого звена
реакцией
![]() ,
которое, в свою очередь, имеет нормальную
,
которое, в свою очередь, имеет нормальную
![]() и тангенциальную
и тангенциальную
![]() составляющие.
составляющие.
К звеньям группы прикладываем силы тяжести, инерции, полезного сопротивления, реакции связей. На схеме нагружения (рис. 3.1.1) силы изображаем отрезками произвольной величины, но строго выдерживая направления этих сил. Силу полезного сопротивления направляем в сторону противоположную скорости. Силы инерции направляем в сторону противоположные ускорению соответствующих точек.

Рис. 3.1. Схема нагружения структурной группы
Сила полезного сопротивления определяется по диаграмме сил, данной в задании на курсовой проект.
Для
нахождения силы полезного сопротивления
перенесем с разметки механизма крайние
положения и в масштабе построим диаграмму
рис. 3.1.2:

Рис. 3.2.
Масштабный коэффициент примем:
![]()
Значение силы полезного сопротивления найдем как
![]() .
.
Определим силу инерции ползуна:
![]() ,
(3.1)
,
(3.1)
![]() Н.
Н.
Силы инерции звена АВ:
![]() ,
(3.2)
,
(3.2)
![]() Н.
Н.
Определим силу тяжести ползуна:
![]() (3.3)
(3.3)
![]() Н.
Н.
Определим силу тяжести звена АВ:
![]() (3.4)
(3.4)
![]() Н.
Н.
Момент
![]() –
направлен в сторону противоположную
угловому ускорению.
–
направлен в сторону противоположную
угловому ускорению.
![]() дана
в задании.
дана
в задании.
![]() Н
Н![]() м.
м.
Запишем уравнение равновесия шатуна относительно точки В:
![]() (3.5)
(3.5)
Из
уравнения (3.3) выразим![]() :
:
![]() (3.6)
(3.6)
![]()
Запишем условие равновесия системы сил, действующих на структурную группу:
![]() .
(3.7)
.
(3.7)
Решим уравнение (3.7) графически (рис. 3.1.4).
Выберем
масштабный коэффициент
![]() .
.
Последовательно
строим вектора всех сил в соответствии
с уравнением (3.7) так, чтобы неизвестные
реакции
![]() и
и
![]() строились в последнюю очередь. Пересечение
линий действия этих двух векторов дадут
решение данного уравнения. На рис. 3.1.3
представлен план сил для структурной
группы в положении №2 механизма.
строились в последнюю очередь. Пересечение
линий действия этих двух векторов дадут
решение данного уравнения. На рис. 3.1.3
представлен план сил для структурной
группы в положении №2 механизма.

Рис. 3.3. План сил структурной группы. Положение №2.
Определим численные значения неизвестных реакций:
![]() ,
,
![]() Н.
Н.
![]() ,
,
![]() Н.
Н.
![]() ,
,
![]() Н.
Н.
Полученные значения вычислений и построений заносим в таблицу4.
Таблица 4
|
|
|
|
|
|
|
|
|
|
|
|
№2 |
547,25 |
9975,2 |
1572,38 |
10098,4 |
163,8 |
349,23 |
7667,88 |
3635,59 |
860 |
|
№3 |
1692,9 |
2569,5 |
2569,5 |
3274 |
163,8 |
349,23 |
5102,9 |
1286,57 |
1362,5 |