

3.3. Сравнение качества регуляторов скорости синтезированных с помощью двух методов
Регуляторы скорости, синтезированные обоими методами, обеспечивают контуру скорости второй порядок астатизма, инженерные запасы устойчивости, а также требуемое быстродейтсвие, судя по переходным процессамв контуре скорости с регулятором на рисунках 21 и 32, то есть качество контура скорости с регуляторами, синтезированными двумя методами, примерно одинаковое. Однако, если сравнть ПФ регуляторов скорости, можно ясно увидеть, что регулятор скорости, полученный методом АФИ-коррекции несомненно сложнее, чем ПИ-регулятор, параметры которого были получены методом двупараметрического RD-разбиения. Кроме того, ПИ-регулятор выпускается промышленно, а не являющийся стандартным регулятор с ПФ (20) придется дополнительно реализовать на микросхемах. Поэтому для контура скорости наиболее подходящим является регулятор, синтезированный в пункте 3.1, и именно с этим регулятором будет проведено имитационное моделирование системы управления приводом постоянного тока в следующем разделе.
Выводы по третьему разделу
В этом разделе двумя методами был синтезирован регулятор скорости. Лучшие свойства имеет ПИ-регулятор, синтезированный методом двупараметрического расширенного D-разбиения, поэтому он и будет использован в следующих разделах как регулятор скорости. Этот регулятор обеспечивает заданное быстродействие в контуре скорости в 3.33 сек и инженерные запасы устойчивости, что подтверждается графиками переходных процессов, ЛАЧХ и ЛФЧХ.
4 Имитационное моделирование
Имитационное моделирование проведем в пакете SimuLink. Набираем в этом пакете схему на рисунке 1 с учетом синтезированных регуляторов тока и скорости.
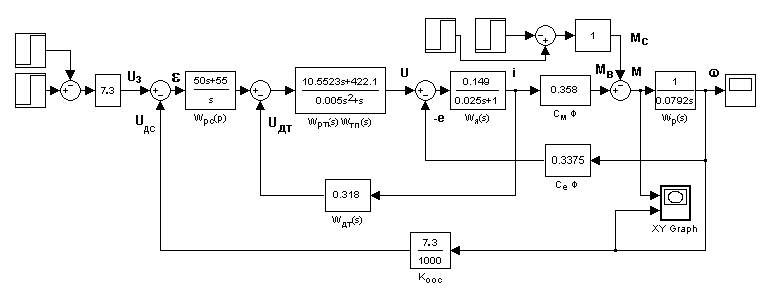
Рисунок 33 — Структурная схема привода постоянного тока для проведения имитационного моделирования в среде пакета SimuLink
Схема на рисунке 33 позволяет смоделировать режимы пуска, наброса/сброса нагрузки и останова. Наброс/сброс нагрузки реализован посредством задействования входа для момента сопротивления. Наброс нагрузки осуществляется в момент времени t = 3c, сбросt = 6c, останов —t = 10c(рисунок. 37)
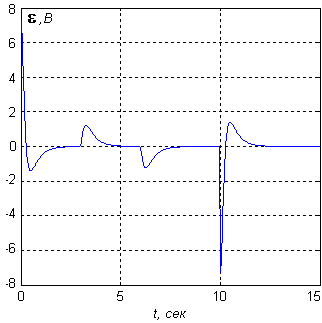
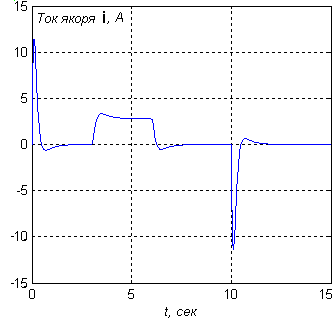
Подав на вход схемы ступенчатое воздействие с амплитудой UЗ= 7.3 В (рисунок 36), получим переходные процессы скорости (рисунок 34), тока якоря (рисунок 35), напряжения тиристорного преобразователя (рисунок 40), ошибки (рисунок 38), а также механическую характеристику двигателя (рисунок 35) при различных режимах работы.
Выводы по четвертому разделу
Из графика переходного процесса скорости следует, что система правильно реагирует на внешнее возмущение в виде момента сопротивления, то есть при набросе нагрузки скорость немного падает, а при сбросе нагрузки — наоборот возрастает, при этом возвращаясь к установившемуся значению через некоторое время.
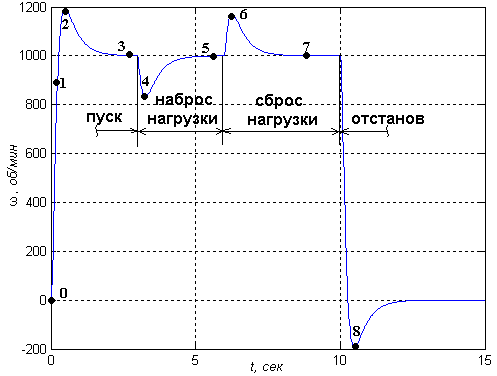
Рисунок 34 — Переходный процесс на выходе
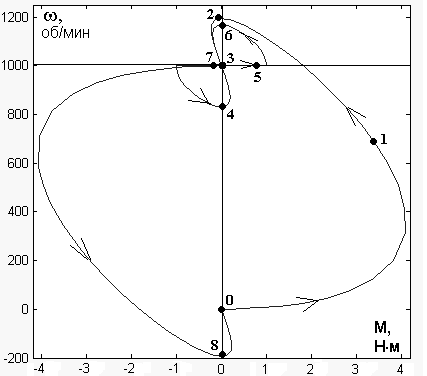
Рисунок 35 — Фазовый портрет (механическая характеристика)
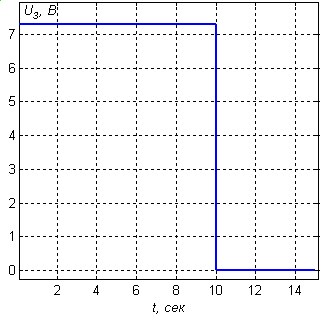
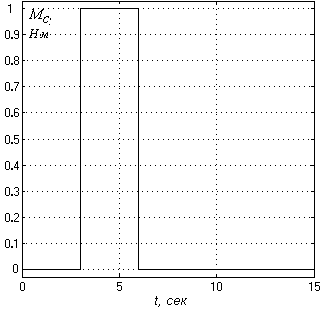
Рисунок 36 — Задающий сигнал Рисунок 37 — Момент сопротивления
|
Рисунок 38 — Переходный процесс ошибки |
Рисунок 39 — Переходный процесс тока якоря |

Рисунок 40 — Напряжение на выходе тиристорного преобразователя
5 Расчет устройства, обеспечивающего инвариантность системы к моменту сопротивления
В этом разделе требуется получить такое устройство, чтобы система на рисунке 1 не реагировала на возмущение. Попытка решения данной задачи с использованием 1 канала возмущения ни к чему не приводит, так как внутренней коррекцией добиться инвариантности к внешнему возмущению невозможно. Если такая задача и может быть решена, то только с помощью внешней коррекции. Принцип сформулировал академик Емельянов как принцип двухканальности. Инвариантность замкнутой системы к внешнему воздействию может быть решена лишь в том случае, если это воздействие имеет не менее 2-х каналов, по которым оно влияет на эту систему.
Преобразуем схему на рисунке 1 с учетом схемы на рисунке 18 к следующему виду
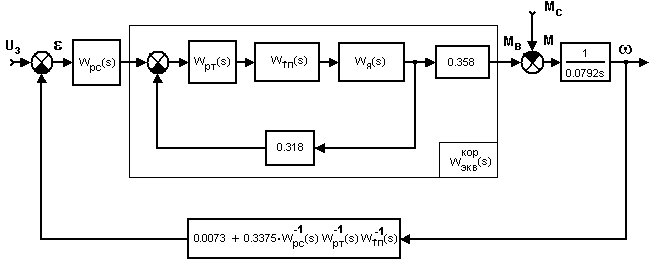
Рисунок 41 — Преобразованная схема динамической модели привода постоянного тока
В приведенной схеме
![]() .
.
Есть различные варианты, куда подключить второй канал возмущения (основной канал подключен на рисунке 41 перед звеном ротора). Считается наилучшим подключение непосредственно на выходе регулятора внешнего контура (рисунок 42).
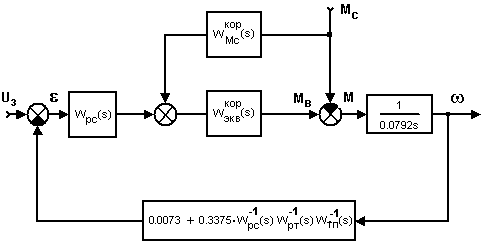
Рисунок 42 — Привод со схемой внешней коррекции
Найдем эквивалентную передаточную функцию, соответствующую структурной схеме на рисунке 42, по каналу возмущения MC. При этом отсутствует задающее воздействие (UЗ= 0). Обозначим
![]() .
(21)
.
(21)
Далее имеем
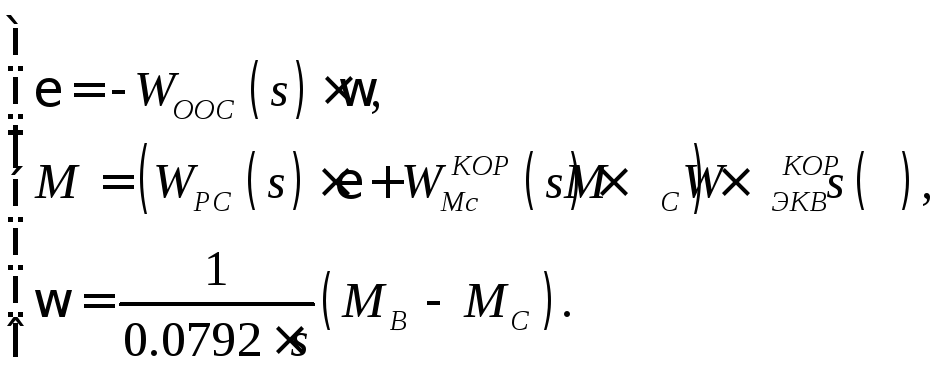 (22)
(22)
Подставляя 1-уравнение во 2-е, затем 2-е в третье, получим
![]() ,
,
![]() ,
,
![]() ,
,
 .
(23)
.
(23)
Чтобы привод не
реагировал на возмущение в виде момента
сопротивления необходимо, чтобы ПФ по
каналу возмущения (23) равнялась 0 (![]() ).
Последнее выполняется тогда и только
тогда, когда либо числитель равен 0, либо
знаменатель стремится к бесконечности.
Будем исходить из требования равенства
нулю числителя (23), тогда
).
Последнее выполняется тогда и только
тогда, когда либо числитель равен 0, либо
знаменатель стремится к бесконечности.
Будем исходить из требования равенства
нулю числителя (23), тогда
![]() .
(24)
.
(24)
Внешнее корректирующее устройство получилось идеальным. Сделаем его реальным, последовательно соединив с ним 2 апериодических звена.
 .
(25)
.
(25)
Чтобы точно убедиться, что корректирующее устройство с ПФ (25) действительно обеспечивает инвариантность к возмущению, воспользуемся структурной схемой из раздела 4 для проведения имитационного моделирования в среде пакета SimuLink, добавив в нее второй канал возмущающего воздействия (рисунок 43). Как и прежде, наброс нагрузки осуществляется в момент времениt = 3c, сбросt = 6c, останов —t = 10c.
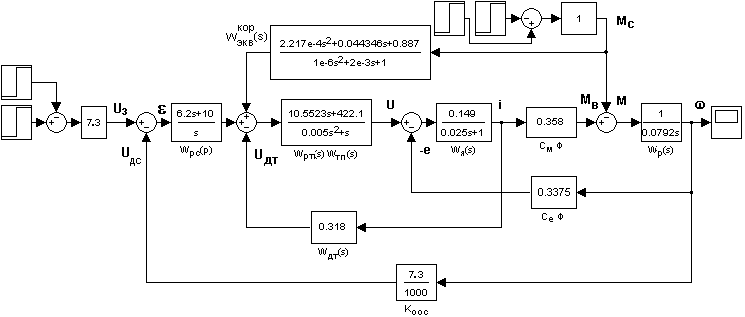
Рисунок 43 — Структурная схема для проведения моделирования процессов в приводе с корректирующим устройством
В результате моделирования в SimuLink, получен переходный процесс на выходе. Как и следовало ожидать, привод с корректирующим устройством инвариантен к моменту сопротивления, поскольку сброс/наброс нагрузки не вносят изменений в его работу.
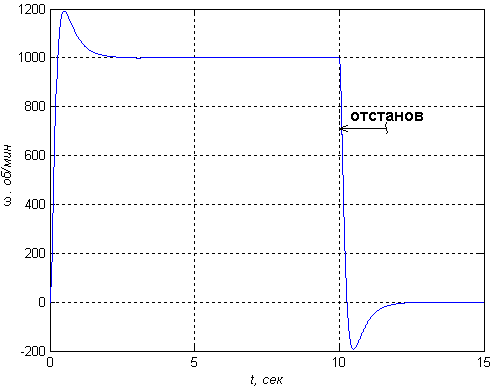
Рисунок 44 — Переходный процесс скорости