

3.2 Синтез регулятора скорости методом афи-коррекции
В этом
пункте будет синтезирован регулятор
скорости с помощью частотно-корректирующих
звеньев, другими словами, будет произведена
последовательная частотная коррекция
контура скорости (КС), в результате
которой будет полученная передаточная
функция устройства управления,
представляющая собой произведение
нескольких частотно-корректирующих
звеньев. Наиболее общий вид ПФ управляющего
устройства в одноконтурных системах
управления имеет вид
![]() ,
где первый сомножитель формирует
необходимые НЧ-свойства системы
управления (астатизм, коэффициент
усиления), а второй — ее динамические
характеристики (быстродействие, степень
устойчивости, перерегулирование и так
далее). При этом процедура синтеза
управляющего устройства разделяется
на 2 этапа. На первом этапе соответствующим
выбором
,
где первый сомножитель формирует
необходимые НЧ-свойства системы
управления (астатизм, коэффициент
усиления), а второй — ее динамические
характеристики (быстродействие, степень
устойчивости, перерегулирование и так
далее). При этом процедура синтеза
управляющего устройства разделяется
на 2 этапа. На первом этапе соответствующим
выбором![]() формируется желаемая НЧ-часть системы
управления. Второй этап подразумевает
синтез второго сомножителя —
среднечастотного корректирующего
устройства. Итак, регулятор скорости —
это 2 последовательно соединенных
устройства, корректирующих НЧ- и
СЧ-свойства.
формируется желаемая НЧ-часть системы
управления. Второй этап подразумевает
синтез второго сомножителя —
среднечастотного корректирующего
устройства. Итак, регулятор скорости —
это 2 последовательно соединенных
устройства, корректирующих НЧ- и
СЧ-свойства.
3.2.1 Критериальная стратегия синтеза
Выпишем ПФ ОУ в контуре скорости (рисунок 18) с учетом синтезированного регулятора тока и без учета входа возмущения в канонической форме.
![]() .
.
Тогда передаточная функция разомкнутого контура скорости до коррекции
![]() . (15)
. (15)
Построим ЛАЧХ и ЛФЧХ (логарифмическая фазочастотная характеристика) разомкнутого контура скорости (РКС) до коррекции (рисунок 28).
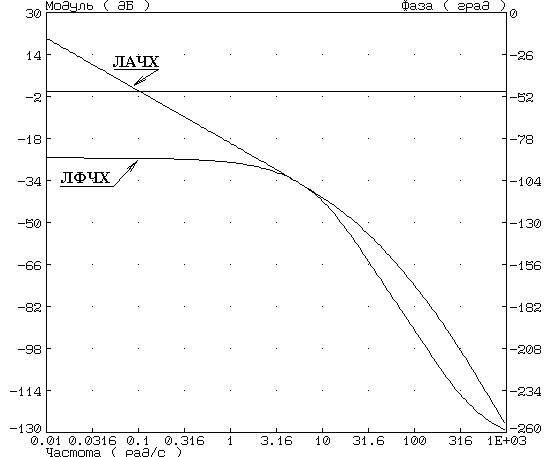
Рисунок 28 — ЛАЧХ и ЛФЧХ разомкнутого контура скорости до коррекции
Зададимся
критериями качества контура скорости,
с учетом которых будет проводится его
частотная коррекция. Задаем желаемый
порядок астатизма разомкнутого контура
скорости
![]() =2,
точность отработки критического
воздействия (2-го порядка)
=2,
точность отработки критического
воздействия (2-го порядка)![]() 0.05,
желаемое время регулирования
0.05,
желаемое время регулирования![]() = 3 сек,
откуда желаемая частота среза
= 3 сек,
откуда желаемая частота среза![]() .
Как следует из (15) порядок разомкнутого
контура скорости с учетом желаемого
второго порядка астатизма равен 5, тогда
инженерные запасы устойчивости должны
быть по модулю 20 дБL25
дБ, по фазе 90120.
ВыбираемLуст= 23
дБ,уст= 100.
.
Как следует из (15) порядок разомкнутого
контура скорости с учетом желаемого
второго порядка астатизма равен 5, тогда
инженерные запасы устойчивости должны
быть по модулю 20 дБL25
дБ, по фазе 90120.
ВыбираемLуст= 23
дБ,уст= 100.
3.2.2 Проведение низкочастотной коррекции
Передаточная функция устройства, корректирующего НЧ-свойства контура скорости (НЧКУ) в общем виде можно записать так:
![]() ,
,
где
![]() —
коэффициент усиления устройства,
корректирующего НЧ-свойства,
—
коэффициент усиления устройства,
корректирующего НЧ-свойства,
![]() — его порядок астатизма.
— его порядок астатизма.
Рассчитаем желаемый коэффициент РКС
![]() ,
,
тогда если
![]() — коэффициент усиления РКС до коррекции,
то
— коэффициент усиления РКС до коррекции,
то![]() .
.
Так
как порядок астатизма РКС до коррекции
равен 1, а желаемый порядок астатизма
2-й, то
![]() .
.
Таким образом ПФ НЧКУ
![]() ,
,
а передаточная функция разомкнутого контура скорости с устройством, корректирующим НЧ-свойства
![]() .
(16)
.
(16)
Строим ЛАЧХ и ЛФЧХ разомкнутого контура скорости с НЧКУ (рисунок 29).

Рисунок 29 — ЛАЧХ и ЛФЧХ разомкнутого контура скорости с НЧКУ
3.2.3 Проведение среднечастотной коррекции
Как следует из рисунка 29, запас устойчивости РКС с НЧКУ по фазе равен 40< 110, по амплитуде — 15 дБ < 23 дБ, поэтому необходима СЧ-коррекция с целью повышения запасов устойчивости до требуемых критериальной стратегией синтеза значений.
В инженерной практике структурный синтез среднечастотного корректирующего устройства обычно сводится к выбору из набора типовых корректирующих устройств, наиболее простыми и распространенными из которых являются корректирующие устройства первого порядка
 .
(17)
.
(17)
Звенья первого порядка осуществляют заданны амплитудные и фазовые искажения в некоторой области частот, потому их называют амплитудо-фазоискажающие звенья (АФИ-звенья) первого порядка. АФИ-звенья бывают двух видов: амплитудо-фазоопережающие (АФО) при T1 > T2и амплитудо-фазозадерживающие (АФЗ) приT1 < T2. Первые используются для коррекции ЛФЧХ, вторые — для коррекции ЛАЧХ. Если требуется провести глубокую коррекцию (одно АФИ-звено обеспечивает фазовый всплеск в 90), могут использоваться последовательно включенные звенья вида (12)
 ,
(18)
,
(18)
где n— порядок коррекции.
Сначала осуществим СЧ-коррекцию с помощью АФО-звена. Использование АФО-звена основано на том, что положительный фазовый всплеск [1] характеристики звена позволяет сдвинуть точку пересечения ЛФЧХ разомкнутой системы и ординаты -вправо, то есть изменяется частота среза и запасы устойчивости. Изменение амплитудной характеристики является побочным эффектом. Алгоритм коррекции с помощью АФО-звена описан в [1]. Главная цель — это расчет параметровTиодного АФО-звена и определение порядка коррекцииn, исходя желаемых запасов устойчивости, порядка астатизма и частоты среза.
Исходя
из
![]() ,
определим по ЛФЧХ необходимую глубину
фазовой коррекции
,
определим по ЛФЧХ необходимую глубину
фазовой коррекции![]() .
Тогда для осуществления коррекции
потребуется минимумnАФО = 2
АФО-звена. Определяемиз уравнения
.
Тогда для осуществления коррекции
потребуется минимумnАФО = 2
АФО-звена. Определяемиз уравнения

которое решим в пакете
Maple. Итак, параметры одного
АФО-звена= 3.188,T = ![]() = 0.265.
= 0.265.
Таким образом ПФ корректирующего устройство из двух АФО-звеньев:
 ,
,
а ПФ размокнутого контура скорости со среднечастотным корректирующим устройством (СЧКУ) в виде АФО-звена
![]() .
.
Строим ЛАЧХ и ЛФЧХ разомкнутого контура скорости с СЧКУ (рисунок 30).
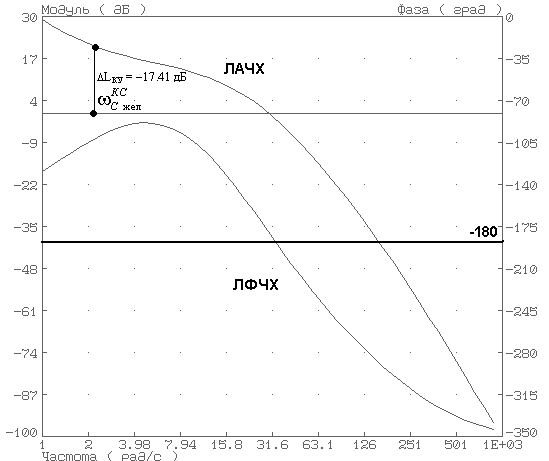
Рисунок 30 — ЛАЧХ и ЛФЧХ разомкнутого контура скорости с НЧКУ
Теперь требуется обеспечить пересечение ЛАЧХ оси частот на частоте среза. Поскольку в критериальной стратегии синтеза имеются требования к точности отработки критического воздействия, то коррекцию ЛАЧХ осуществим с помощью АФЗ-звеньев. АФЗ-звенья используются, когда необходимо повысить коэффициень усиления, либо добиться устойчивости системы при заданном коэффициенте усиления разомкнутой системы. При этом изменение фазовой харакетристики является побочным эффектом коррекции.
По рисунку 30 определяем необходимую глубину амплитудной коррекции, то есть насколько необходимо поднять или опустить ЛАЧХ, что обеспечить пересечение
LКУ=23.04 дБ.
Определяем значение параметра АФЗ-звена
![]() ,
,
тогда величина диапазона
коррекции dКУ= ![]() не
превышает допустимого значения в 1.5
дек.,
не
превышает допустимого значения в 1.5
дек.,
Чтобы
определить параметр TАФЗ-звена, представим его в виде![]() ,
гдесопределяется из уравнения
,
гдесопределяется из уравнения
![]()
где
![]() —
допустимое значение фазового искажения
на частоте среза. Решаем уравнение
—
допустимое значение фазового искажения
на частоте среза. Решаем уравнение
![]() .
.
Находим с= 40.02,
тогда![]() .
.
Таким образом ПФ АФЗ-звена:
 ,
,
а окончательная ПФ разомкнтутого контура скорости
![]() .
(19)
.
(19)
Построим его ЛАЧХ и ЛФЧХ (рисунок 31).
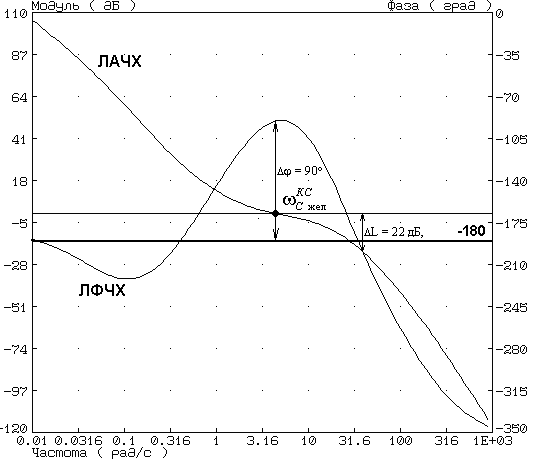
Рисунок 31 — ЛАЧХ и ЛФЧХ разомкнутого контура скорости с регулятором
По
рисунку 31 видно, что запас устойчивости
по фазе равен 90, по
амплитуде — 22 дБ и ЛАЧХ пересекает ось
частот на желаемой частоте среза![]() .
Значит, контур скорости с
частотно-корректирующими устройствами
удовлетворяет требованиям критериальной
стратегии синтеза.
.
Значит, контур скорости с
частотно-корректирующими устройствами
удовлетворяет требованиям критериальной
стратегии синтеза.
Таким образом, регулятор скорости
![]() .
(20)
.
(20)
Переходный процесс (управляющее напряжение 7.3 В) контура скорости с синтезированным регулятором изображен на рисунке 32.
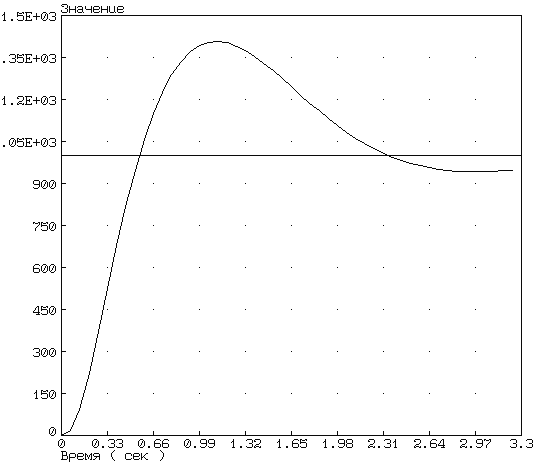
Рисунок 32 — Переходный процесс в контуре скорости с регулятором