

Выводы по второму разделу
В этом разделе был синтезирован методом желаемых ЛАЧХ и собран на операционных усилителях регулятор тока, благодаря которому контур тока удовлетворяет требованиям критериальной стратегии синтеза. Кроме того, регулятор обеспечивает контуру тока астатизм первого порядка.
3 Синтез регулятора скорости
В этом разделе будет синтезирован регулятор скорости. Синтез будет проведен двумя различными методами: методом двупараметрического RD-разбиения и методом АФИ-коррекции. Оба регулятора обеспечат контуру скорости астатизм 2-го порядка. После синтеза регулятора скорости двумя методами, будет сделан вывод, какой из регуляторов обеспечивает лучшие характеристики контуру скорости и соответственно какой из методов предпочтительнее использовать.
3.1 Синтез регулятора скорости методом двупараметрического расширенного d-разбиения
Выделим в схеме привода (рисунок 1) объект управления, регулятор которым будем синтезировать, и найдем его ПФ. Для этого преобразуем схему на рисунке 1 к следующему виду
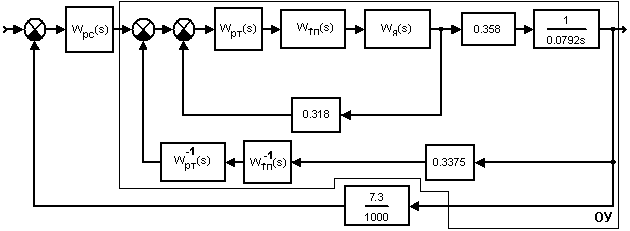
Рисунок 18 — Преобразованная структурная схема контура скорости
Выпишем ПФ ОУ в контуре скорости (рисунок 18) с учетом синтезированного регулятора тока и без учета входа возмущения в канонической форме.
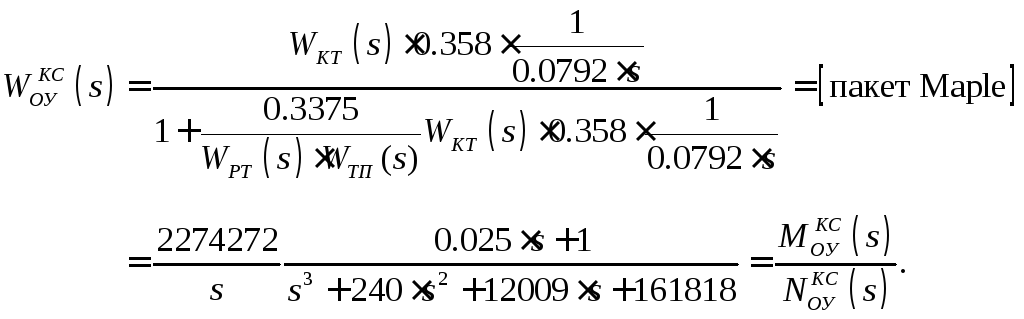 (10)
(10)
При синтезе этим методом сначала выбирается вид регулятора. Собственно метод двупараметрического RD-разбиения служит для нахождения значений параметров регулятора выбранного типа в соответствии с требованиями критериальной стратегии.
Синтезировать будем параметры ПИ-регулятора с несвязными настройками
![]() .
(11)
.
(11)
Как
обычно перед синтезом регулятора
задаемся критериальной стратегией
синтеза: быстродействие t![]() = 3.33
сек; колебательность ψКС= 0.9.
= 3.33
сек; колебательность ψКС= 0.9.
Запишем ПФ замкнутого контура скорости с ПИ-регулятором
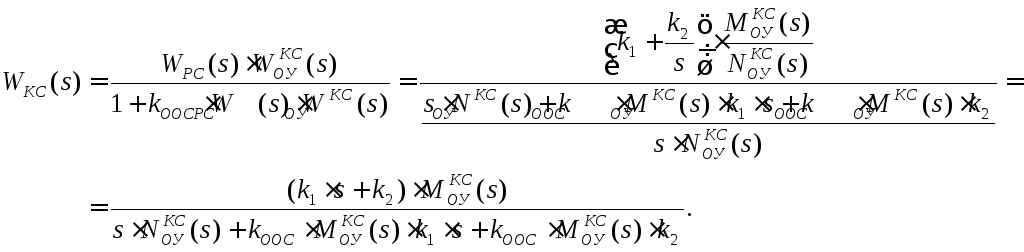 (12)
(12)
Таким образом, характеристический полином замкнутого контура скорости:
![]() .
(13)
.
(13)
В зависимости от параметров k1 и k2ХП будет иметь различные корни, а контур скорости соответственно различные свойства. Подставив в выражение для ХП комплексное расширение
 ,(14)
,(14)
можно получить выражения, на основе которых строятся области, в которых k1 и k2принимает нужные нам значения. Соответствующая методика описана в курсе ТАУ [2]. Вручную получить такие выражения очень сложно, поэтому воспользуемся математическим пакетом Maple, составив в нем программу расчета (текст программы приведен в ПриложенииB).
В результате работы программы получим:
— главный определитель:
![]()
— определитель для k1:

— определитель для k2:

(![]() )
)
Тогда
![]() .
Уравнение особой прямой (получается
при= 0):
.
Уравнение особой прямой (получается
при= 0):![]() .
.
Строим годограф RD-разбиения (рисунок 19). Чтобы выполнить правильно штриховку годографа, возьмем 7 точек (k1, k2) из различных областей на рисунке 19, и, подставив их в (13), найдем корни ХП замкнутого контура скорости.
Получим условие того, что корни ХП принадлежат области качества. Кривая, ограничивающая область качества (14), может записана в следующем виде, сопоставив координате х вещественную часть, а координате y — мнимую:
![]() .
(15)
.
(15)
Качественные корни — это корни, лежащие левее кривой (15). Значит, для того чтобы корень piбыл качественным, он должен удовлетворять неравенству
![]() .
(16)
.
(16)
Проверка этого условия была заложена в упомянутую выше программу. В результате было выяснено, сколько в различных областях рисунка 19 некачественных корней. Из курса ТАУ [2] известно, что при переходе из области двойной штриховки в область без штриховки теряются 2 качественных корня, а при переходе из области одинарной штриховки — 1 качественный корень. С учетом этого была произведена штриховка годографа RD-разбиения (рисунок 19) и тем самым было точно установлено, что область (a ‑ b ‑ c) — искомая область качества: k1[32, 78],k2[28, 135].
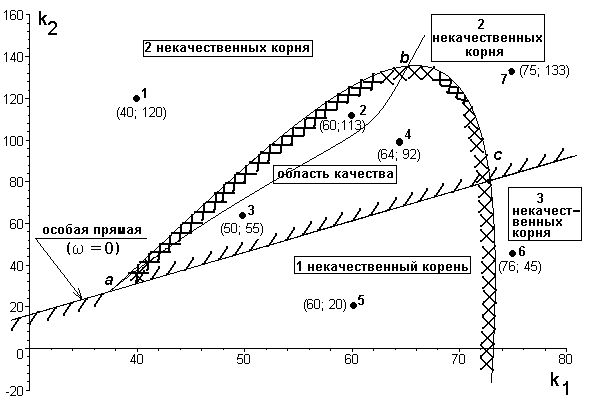
Рисунок 19 — Годограф двупараметрического RD-разбиения
Для наглядности приведем переходные процессы замкнутого контура скорости для 7 пар значений параметров настройки ПИ-регулятора (номера точек по порядку показаны на рисунке 19) при номинальном значении входного напряжения в 7.3 В (рисунки 19-25).

Рисунок 19 — Переходный процесс при k1=40,k2= 120(a ‑ b ‑ c) - точка 1
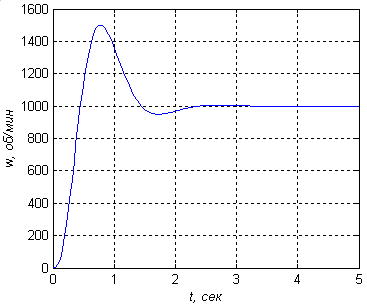
Рисунок 20 — Переходный процесс при k1=60,k2= 113(a ‑ b ‑ c) - точка 2
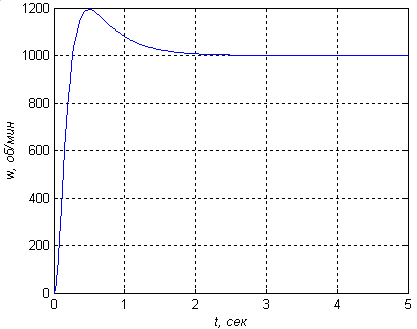
Рисунок 21 — Переходный процесс при k1=50,k2= 55(a ‑ b ‑ c) - точка 3
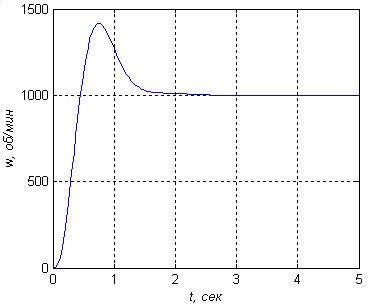
Рисунок 22 — Переходный процесс при k1=64,k2= 92(a ‑ b ‑ c) - точка 4
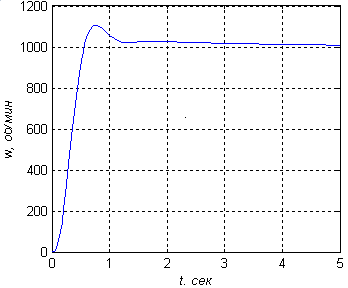
Рисунок 23 — Переходный процесс при k1=60,k2= 20(a ‑ b ‑ c) - точка 5
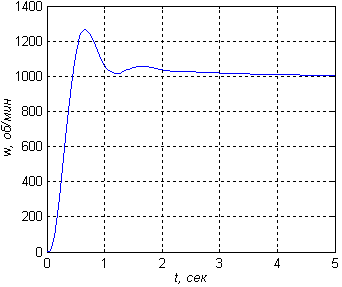
Рисунок 24 — Переходный процесс при k1=76,k2= 45(a ‑ b ‑ c) - точка 6
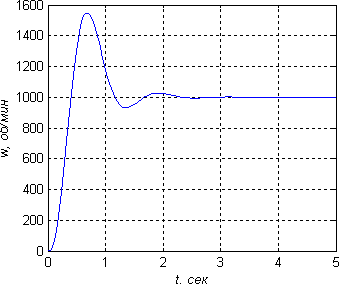
Рисунок 25 — Переходный процесс при k1=75,k2= 133(a ‑ b ‑ c) - точка 7
Для окончательного решения задачи синтеза выберем в области (a - b - c) значения параметров настройки в качестве окончательного варианта. Выбор произведем с учетом инженерных запасов по модулю и фазе системы с ПИ-регулятором.
Структурная схема разомкнутого контура скорости (РКС) в свернутом виде приведена на рисунке 26.
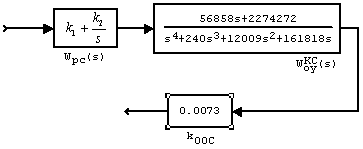
Рисунок 26 — Структурная схема разомкнутого контура скорости
Выпишем ПФ разомкнутого контура скорости
![]() .
(13)
.
(13)
Как видно из (13) порядок разомкнутого контура равен 5 при первом порядке астатизма, значит, согласно таблицам (см.[1]) инженерные запасы устойчивости по модулю должны быть 20 дБ L25 дБ, а по фазе — 70120.
Набираем схему разомкнутого контура скорости (рисунок 26) в пакете CLASSIC. Из рисунков 20-22 видно, что наиболее качественный ПП замкнутый контур скорости имеет при значениях параметров настройки в районе k1= 50,k2= 55. Построим для этих значений ЛАЧХ и ЛФЧХ разомкнутого контура.
Как следует из рисунка 15, запасы устойчивости = 80, аL = 36 дБ, значит, замкнутый контур скорости с ПИ-регулятором, имеющим параметрыk1= 50,k2= 55, удовлетворяет инженерным запасам устойчивости. Итак, регулятор скорости
![]() .
(14)
.
(14)
Переходный процесс контура скорости с синтезированным регулятором изображен на рисунке 21.

Рисунок 27 — ЛАЧХ и ЛФЧХ разомкнутого контура скорости при k1= 50,k2= 55