

2.2.5 Реализация регулятора тока на операционных усилителях
Для упрощения процесса построения регулятора тока на операционных усилителях, преобразуем его ПФ (8) следующим образом:

 (8')
(8')
Первое слагаемое в (8') представляет собой произведение изодромного и апериодического звеньев, второе — это апериодическое звено, третье — инерционное дифференцирующее звено. Из курса "Электроники" известно, как собрать на операционных усилителях эти звенья.
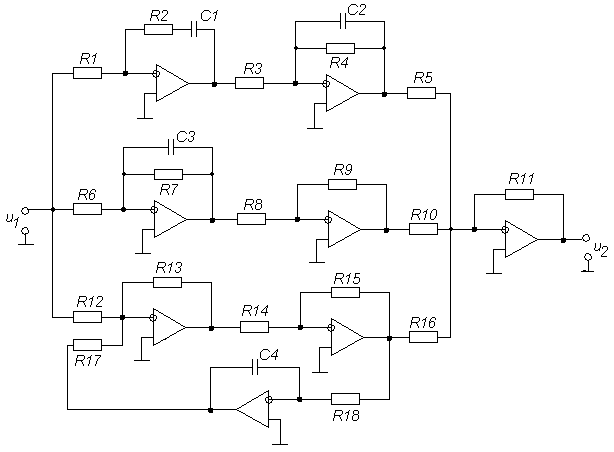
Рисунок 10 — Регулятор тока на операционных усилителях
Схема,
как видно, состоит из трех параллельных
ветвей, замыкающихся выходами на
инвертирующий сумматор на операционном
усилителе, поэтому выходной сигнал u2будет инвертирован относительно входногоu1. В случае
необходимости согласованияu1
иu2 потребуется
поставить дополнительно на выходе
сумматора инвертор. Этот прием был
применен в средней ветви схемы, поскольку
апериодическое звено построено на
инвертирующем операционном усилиителе.
Верхняя ветвь отвечает за ПФ .
Произведение изодромного и апериодического
звеньев сделано путем последовательного
соединения их схем на инвертирующих
операционных усилителях, и так как
каждое звено инвертирует сигнал, то
согласования входа и выхода верхней
ветви не требуется. Нижняя ветвь,
реализующая инерционное динамическое
звено, входной сигнал не инвертирует.
.
Произведение изодромного и апериодического
звеньев сделано путем последовательного
соединения их схем на инвертирующих
операционных усилителях, и так как
каждое звено инвертирует сигнал, то
согласования входа и выхода верхней
ветви не требуется. Нижняя ветвь,
реализующая инерционное динамическое
звено, входной сигнал не инвертирует.
Рассчитаем параметры схемы. Известно, что
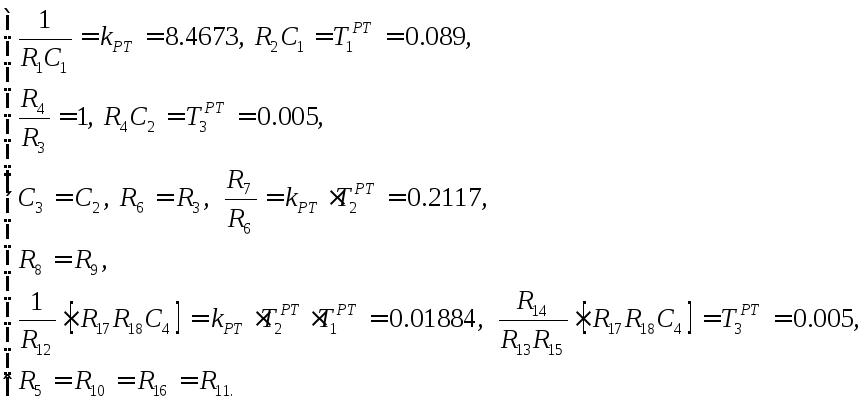
Задав
R1=R3=R5= R8=R12=R17= R18= 500 Ом,R13= 300 Ом,R14= 50 Ом получим, чтоС1=![]() =
=![]() = 240
мкФ,С2=С3=
= 240
мкФ,С2=С3=![]() =
=![]() =
10 мкФ, С4=
=
10 мкФ, С4=![]() =
=![]() = 40
мкФ,R2=
= 40
мкФ,R2=![]() =
= ![]() = 380
Ом,R4=R6=R9=R10=R11=R16= 500 Ом,R7= 110 Ом,R15=
= 380
Ом,R4=R6=R9=R10=R11=R16= 500 Ом,R7= 110 Ом,R15=![]() =
=
=
= ![]() = 310
Ом.
= 310
Ом.
2.3AmLahx— программа построения асимптотических лачх и синтеза регуляторов методом желаемых лачх
2.3.1 Общие сведения о программе
Программа AmLAHXпредназначена для выполнения в средеMatLab6.0 или выше и предоставляет пользователю следующие возможности:
имеет GUI-интерфейс;
строит асимптотические ЛАЧХ динамических объектов, заданных в виде передаточных функций;
строит в диалоговом режиме желаемую ЛАЧХ разомкнутой системы по задаваемым критериям качества, в том числе, программа позволяет выбирать пользователю сопрягающие участки (их наклоны) в зависимости от вида ЛАЧХ объекта управления;
обеспечивает автоматическое вычитание из ЛАЧХ разомкнутой системы ЛАЧХ объекта управления и построение таким образом ЛАЧХ регулятора, возвращает сопрягающие частоты и наклоны асимптот, что позволяет достаточно легко по ЛАЧХ регулятора записать его передаточную функцию (в последующих версиях программа будет делать это автоматически);
все ЛАЧХ строятся с указанием наклонов асимптот, пользователь может сам определять цвета каждой ЛАЧХ в отдельности, а также формат надписей на графиках (толщина, высота).
2.3.2 Командная строка программы
Полная командная строка для запуска программы имеет вид
yy = amlahx(num,den,flag,param),
где numиden— соответственно числитель и знаменатель ПФ объекта управления,numиdenдолжны быть векторами, записанными в форматеMatLab(смотрите пример ниже);
flag— режим работы (1 (по умолчанию) или 2);
param— вектор из 6 элементов (чисел), 1, 2 и 3 элементы соответственно толщина ЛАЧХ ОУ, РС и УУ, 4, 5 и 6 — цвета этих ЛАЧХ (по умолчанию толщина всех ЛАЧХ равна 1, цвета соответственно красный, голубой и зеленый).
AmLAHXбез параметров работает вdemo-режиме, в этом случае
num= [1 0.2],den = [100 110 11 1 0],flag= 2.