

1 Параметры и динамическая модель исследуемого привода. Выбор методов синтеза
Основные параметры привода постоянного тока и двигателя постоянного тока, рассматриваемых в данной работе, представлены в таблице 1.
Таблица 1 — Параметры ДПТ и ППТ
|
RЯ |
TЯ |
TМ |
CEФ |
CМФ |
n |
UН |
IН |
J |
Ф |
|
6.71 |
0.025 |
4.4 |
0.3375 |
0.358 |
1000 |
110 |
10 |
0.0792 |
0.0038 |
|
kТП |
TТП |
kДТ |
kТГ |
UЗ |
|
49.8505 |
0.089 |
0.318 |
0.0366 |
7.3 |
Пояснения к таблице 1:
RЯ— активное сопротивление якорной цепи (Ом);
ТЯ— постоянная времени якорной цепи (сек);
ТМ— электромеханическая постоянная времени (сек);
CE,CМ— электрическая и механическая конструктивные постоянные ДПТ;
n — номинальная скорость вращения ДПТ (об/мин);
UН— номинальное напряжение (В);
IН— номинальный ток (А);
J— момент инерции ДПТ (кгм2);
Ф— магнитный поток (Вб).
kТП— коэффициент усиления тиристорного преобразователя;
ТТП— постоянная времени ТП (сек);
kДТ— коэффициент усиления датчика тока;
kТГ— коэффициент усиления тахогенератора;
UЗ— номинальное задающее напряжение (В).
Общая структурная схема ППТ (динамическая модель) изображена на рисунке 1.
Пояснения к рисунку 1:
(1)
![]() — передаточная функция тиристорного
преобразователя; (2)
— передаточная функция тиристорного
преобразователя; (2)
![]() — ПФ якорной цепи;
— ПФ якорной цепи;
(3)
![]() — ПФ цепи ротора;
— ПФ цепи ротора;
(4)
![]() — ПФ датчика тока;
— ПФ датчика тока;
(5)
![]() — ПФ датчика скорости;
— ПФ датчика скорости;
![]() —
ПФ регулятора тока;
—
ПФ регулятора тока;
![]() — ПФ регулятора скорости со связными
настройками;
— ПФ регулятора скорости со связными
настройками;
На рисунке 1 сигналы имеют следующий смысл: — сигнал ошибки (В);i— ток якоря (А);U— напряжение на выходе тиристорного преобразователя (В);MВ— момент якоря (Нм);МС— момент сопротивления (Нм);М— динамический момент (Нм);UДС = UООС— напряжение на выходе датчика скорости (В);UДТ— напряжение на выходе датчика тока (В);— скорость вращения двигателя (об/мин).
Существуют различные методы синтеза регуляторов. Для синтеза регулятора тока выберем метод желаемых ЛАЧХ. Это графический метод синтеза, а потому он достаточно нагляден. Синтез регулятора скорости проведем двумя распространенных методами RD-разбиения и АФИ-коррекции, а затем выясним, какой из методов дает лучшие результаты.
Выводы по первому разделу
Синтез регулятора тока в работе проведем методом желаемых ЛАЧХ, а регулятора скорости — методами расширенного D-разбиения и АФИ-коррекции.
|
|
Рисунок 1 — Динамическая модель привода постоянного тока с якорным управлением (система управления) |

2 Синтез регулятора тока методом желаемых лачх
2.1 Краткая теория вопроса
2.1.1 Динамическая модель контура тока
Настройка контура тока, то есть выбор типа регулятора и расчет его характеристик обычно производится так, чтобы получить технически оптимальный переходный процесс (настройка на технический оптимум). Технически оптимальным считается такой переходный процесс, при котором время изменения регулируемой величины от 0 до установившегося значения было бы минимально возможным при перерегулировании, не превышающем 4-10 %. Расчет контура тока производится для случая неподвижного якоря или отключенной обмотки возбуждения, что соответствует пуску, поэтому динамическая модель контура тока имеет вид, представленный на рисунке 2.
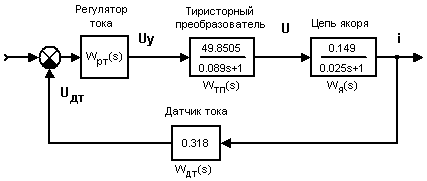
Рисунок 2 — Динамическая модель контура тока
2.1.2 Метод желаемых лачх
При линеаризованном описании передаточная функция разомкнутой системы — это произведение передаточных функций объекта управления и управляющего устройства. При этом ЛАЧХ разомкнутой системы представляет собой сумму характеристик объекта и регулятора, поэтому, имея ЛАЧХ желаемой разомкнутой системы и ЛАЧХ объекта, можно получить ЛАЧХ регулятора простым графическим вычитанием. Таким образом сущность метода желаемых ЛАЧХ состоит в следующем. По определенной методике строится желаемая амплитудная характеристика разомкнутой системы. На том же графике строится ЛАЧХ объекта управления, затем графическим вычитанием из ЛАЧХ разомкнутой системы ЛАЧХ объекта получим ЛАЧХ управляющего устройства, по которой определяется его передаточная функция. Для удобства построения перехода от ЛАЧХ к передаточной функции используются асимптотические ЛАЧХ.
Для автоматизации применения метода желаемых ЛАЧХ для синтеза регулятора автор разработал на языке MatLabс использованием его средств визуального программирования программуAmLAHX. С ее помощью и будет произведен синтез регулятора тока пункте 2.2. Описанию программы посвящен пункт 2.3. Текст программы приведен в приложении А.