

2.2 Синтез регулятора тока с помощью программыAmLahx
При помощи пакета SimuLinkпостроим переходный процесс (рисунок 4) контура тока без регулятора (рисунок 3).
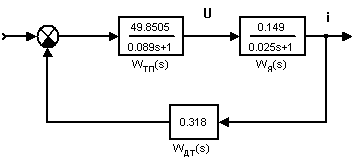
Рисунок 3 — Контур тока без регулятора
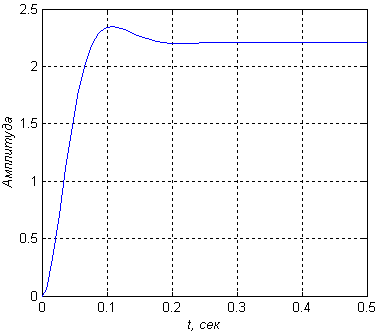
Рисунок 4 — Переходный процесс в контуре тока без регулятора
Как следует из рисунка 4, улучшить контур можно разве, что сделав переходный процесс в контуре апериодическим.
Зададимся следующими критериями качества контура тока:
— желаемое время
регулирования
![]() = 0.3
сек;
= 0.3
сек;
— степень астатизма
![]() =1;
=1;
— точность отработки
критического воздействия ![]() 0.05;
0.05;
— желаемое
перерегулирование ![]() = 5
%.
= 5
%.
2.2.1 Построение лачх объекта управления
На рисунке 5 изображена структурная схема разомкнутой системы, соответствующей контуру тока (см. рисунок 2).
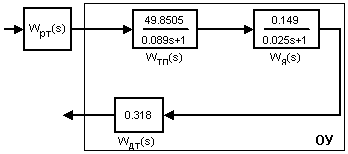
Рисунок 5 — Разомкнутая система, соответствующая контуру тока
Согласно рисунку 5 ПФ объекта управления в контуре тока
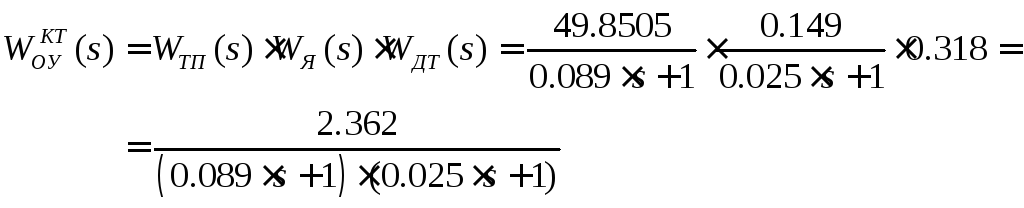 .
(6)
.
(6)
ОУ статичный, поэтому
наклон НЧ-части ЛАЧХ равен 0. Высота
НЧ-части —
![]() .
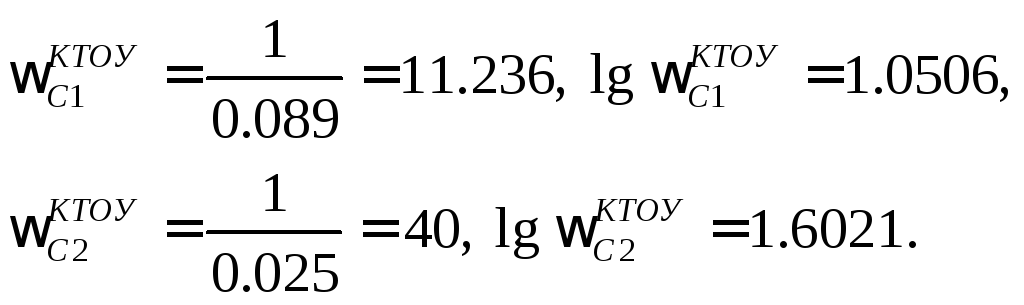
Сопрягающие частоты:
.
Сопрягающие частоты:
ЛАЧХ объекта, построенная с помощью AmLAHX, изображена на рисунке 6.
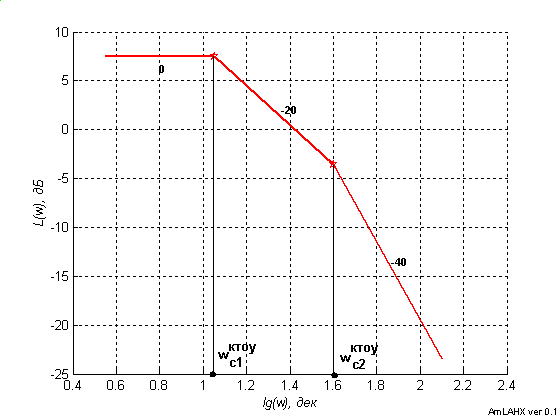
Рисунок 6 — ЛАЧХ объекта управления (для контура тока)
2.2.2 Построение желаемой лачх
Желаемая характеристика рассматривается как совокупность НЧ-,СЧ- и ВЧ-областей.
Рассчитаем желаемый коэффициент усиления канонической формы разомкнутой системы, исходя из требований к точности:
![]() .
.
Рассчитаем желаемую частоту среза, зная желаемое время регулирования:
![]() .
(7)
.
(7)
НЧ-часть
— это прямая, проходящая с наклоном
20![]() = -20
дБ/дек через точку (lg1,
= -20
дБ/дек через точку (lg1,![]() )
(рисунок 7).
)
(рисунок 7).
CЧ-часть
— отрезок прямой, проходящей с наклоном
минус 20 дб/дек и пересекающая ось частот
в точке![]() дек.
Концы отрезка — это концы диапазона
допустимого отклонения ЛАЧХ в СЧ-области
(ω,l).
Величинаlопределяется по специальным номограммам,
исходя из желаемого перерегулирования.
В нашем случаеl= ±20
дБ (см. рисунок 7).
дек.
Концы отрезка — это концы диапазона
допустимого отклонения ЛАЧХ в СЧ-области
(ω,l).
Величинаlопределяется по специальным номограммам,
исходя из желаемого перерегулирования.
В нашем случаеl= ±20
дБ (см. рисунок 7).
ВЧ-часть строится из принципа минимальной сложности реализации, согласно которому эта часть должна быть параллельна ЛАЧХ ОУ в ВЧ-области. В нашем случае проводим ее из конца СЧ-части под наклоном минус 40 дб/дек (см. рисунок 7).
Последним этапом синтеза регулятора методом желаемых ЛАЧХ является сопряжение НЧ- и СЧ-частей таким образом, чтобы максимально упростить вид желаемой ЛАЧХ.
Желаемая ЛАЧХ разомкнутой системы изображена на рисунке 7.
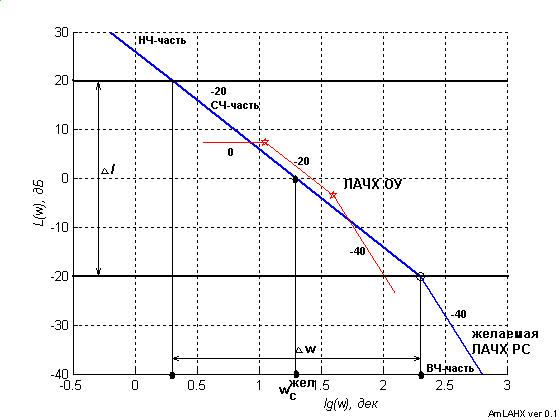
Рисунок 7 — Желаемая ЛАЧХ разомкнутой системы (для контура тока)
2.2.3 Графическое вычитание из лачх разомкнутой системы лачх объекта управления и получение таким образом лачх регулятора.
На рисунке 8 изображена ЛАЧХ регулятора тока, полученная программой AmLAHX.
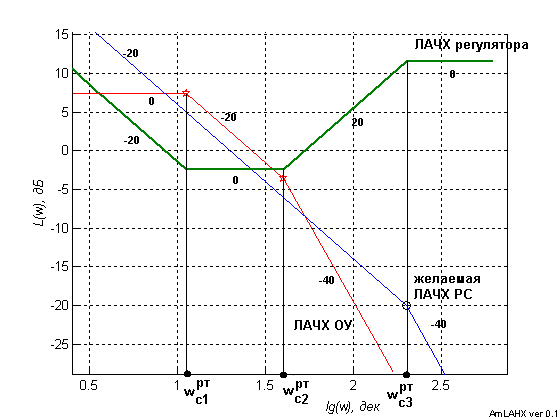
Рисунок 8 — ЛАЧХ регулятора тока
2.2.4 Определение передаточной функции регулятора по его лачх.
Определяем
астатизм управляющего устройства
![]() и его коэффициент усиления
и его коэффициент усиления![]() .
Далее по ЛАЧХ определяем сопрягающие
частоты, а по ним — постоянные времени
динамических звеньев, входящих в ПФ
регулятора:
.
Далее по ЛАЧХ определяем сопрягающие
частоты, а по ним — постоянные времени
динамических звеньев, входящих в ПФ
регулятора:
Учитывая наклоны на частотах среза, формируем ПФ регулятора тока
 .
(8)
.
(8)
Таким образом, ПФ разомкнутой системы имеет вид
![]() ,
,
а, учитывая, что ПФ прямого канала контура тока —
![]() ,
,
ПФ замкнутого контура тока запишется так
![]() .
(9)
.
(9)
При помощи пакета SimuLinkпостроим переходный процесс контура тока с регулятором (рисунок 9).
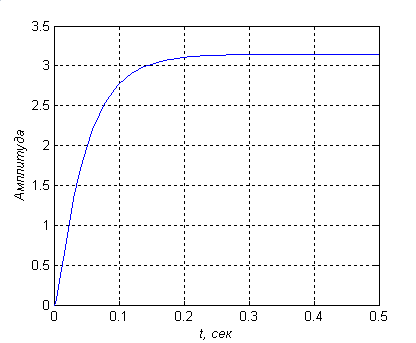
Рисунок 9 — Переходный процесс в контуре тока с регулятором
Как можно видеть, сравнив рисунок 4 и рисунок 9, благодаря регулятору, переходный процесс в контуре тока стал апериодичным, при этом быстродействие не изменилось.