

6.4 Дискретное корректирующее устройство
Для коррекции системы можно прибегнуть к помощи программы для микропроцессора, которая будет реализовывать передаточную функцию корректирующего устройства. Чтобы составить программу, необходимо найти разностное уравнение в реальном масштабе времени.
Проведем обратное биполярное преобразование передаточной функции корректирующего устройства с помощью формулы:
![]() (29)
(29)
Примем Т0 равным 90 секунд. Это промежуток времени, через который пульт управления проводит опрос извещателя дыма.
![]()
![]()
![]()
По порченной формуле найдем разностное уравнение в реальном масштабе времени, для этого введем в числитель дополнительный сдвиг на z ~l, получим:
Ulk = - Ulk-1 + 0.66 * Uk-1 + 0.64 * Uk.2 (30)
где Ul - выходная функция,
U входная функция.
Уравнение является корректирующим устройством, то есть по нему пишется программа коррекции, которая заносится в микропроцессор или ЭВМ.
Составляется программа на языке Ассемблер, по которой будет осуществляться управление:
; расчет формулы
; U1(К) = - Ul(K-l) + 0.66 * U(K-I) + 0.64 * U(K-2)
Al EQU 0.66 ; задаем постоянные коэффициенты
А2 EQU 0.64 ; задаем постоянные коэффициенты
A3 EQU 1 ; задаем постоянные коэффициенты
Ul DB 0 ;выделение места под U(K-l)
U2 DB 0 ;выделение места под U(K-2)
U3 DB 0 ;выделение места под Ul(K-l)
i port EQU lOh
port EQU 12h
step:
in al, i port;
MOV al,Ul
MUL aLAl;0.66*U(K-l)
MOV bLal
MOV al,U2
MUL al,A2;
ADD bl,al; 0.66 * U(K-l) + 0.64 * U(K-2)
MOV al,U3;
MUL al,A3;
SUB bl,al; 0,66 * U(K-1)+ 0.64 * U(K-2) - Ul(K-l)
out о portbl;
JMP step; замыкание цикла.
Исходя из программы, можно сказать, что для ее реализации требуются следующие операции: логические (переадресации), короткие (сложение, вычитание) и длинные (умножение). Для используемого пульта управления время переадрессации тк = 4,2 мкс, коротких операций тк = 7,4 мкс, а длинных операций тд = 98 мкс. В результате можно найти время выполнения всей программы твпр ^ 227,6 мкс. Откуда следует, что гвпр < Т0. Технические характеристики используемого пульта управления удовлетворяют требованию по быстродействию,
Блок-схема алгоритма коррекции представлена на рисунке 11,
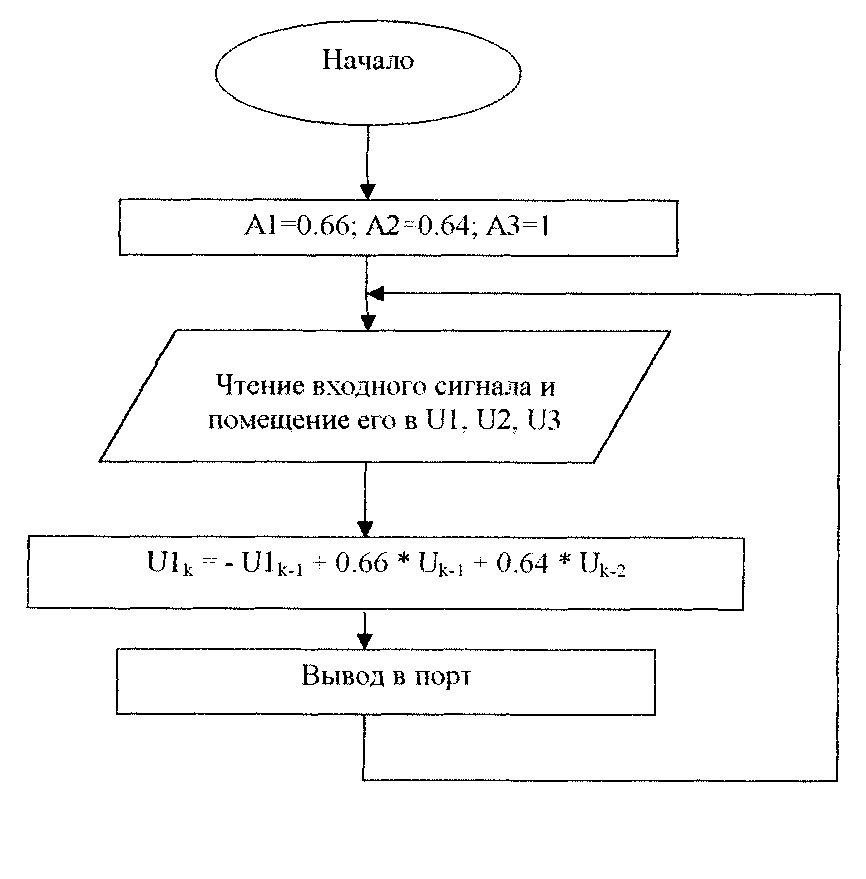
Рисунок 11 - Блок-схема дискретного корректирующего устройства
ЗАКЛЮЧЕНИЕ
Разработанная
система аварийной противопожарной
сигнализации отвечает всем
требованиям, указанным в техническом
задании. Она была проверена на устойчивость
с помощью критерия Михайлова, что
доказало система устойчивая.
Для нее были построены ЛАЧХ неизменяемой
часта, ЖЛАЧХ, ЖФЧХ. С помощью ЛАЧХ
скорректированной системы было выбрано
корректирующее
устройство, которое обеспечило коррекцию
исходной системы в соответствии с ее
техническими параметрами. Запасы
устойчивости системы по амплитуде
стремятся к бесконечности. Так же была
составлена корректирующая программа
для управления разработанной системой.
Если сравнить корректирующую
программу и корректирующее устройство
в виде RC-цепочки,
то
можно сказать, что в данной системе
предпочтительнее использовать дискретное
КУ, так как оно также обеспечивает
требуемую коррекцию, но быстродействие
его выше, чем у RC-цепочки:
твпр
= 227,6 мкс, Tky=0.667
c
=>
![]() <
<![]()
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
-
Журнал «Приборостроение и средства автоматики», ООО Издательство «Научтехлитиздат», №8, 2001г.
-
Журнал «Приборостроение и средства автоматики», ООО Издательство «Научтехлитиздат», №11, 2001г.
-
Топчеев Ю. И. «Атлас для проектирования систем автоматического регулирования», М., Машиностроение, 1989г.