

Лабораторные работы / Солод-ЗЗ практика
.doc

Wмп=1
W1(p)=64/(0,5p+1)
W2(p)=153/(0,03p+1)
W3(p)=10/(0,008p+1)
W4(p)=95,5
W5(p)=2,7/((0,9p+1)(0,09p+1))
W6(p)=0,01/(0,01p+1)
Передаточная функция данной системы :
![]()
Wперед.(p)=
Переходный процесс :
p=s
![]()
Wперед.(s)=
h(t)= Wперед.(s)/s ![]()
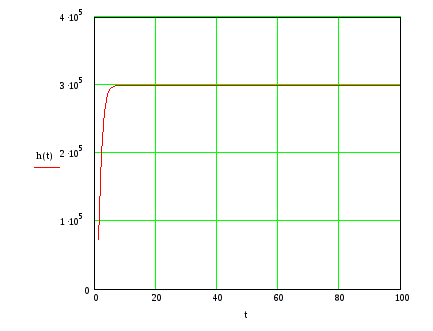
Проведем прямую оценку качества системы.
1) Находим время переходного процесса – эта величина характеризует быстродействие системы:
hуст = hmax= 3*105;
тогда Δ = 5% *(hуст) = 15*105.
tр =7с
tc=7c – время первого согласования
2) Определим перерегулирование – максимальное отклонение регулируемой величины от установившегося значения:
![]() Принимаем σ =
25%
Принимаем σ =
25%
3) Находим колебательность системы, которое характеризуется числом колебаний регулируемой величины за время переходного процесса.
h = 1– количество колебаний (вторая волна не до конца).
m=1,27.
Приемлемым числом колебаний является 1-2.
4) Время нарастания регулируемой величины – время от момента приложения сигнала до того момента, когда выходная величина достигнет своего максимального значения:
tн(tмах) = 7 с.
5) Время первого согласования, т.е. время, когда регулируемая величина первый раз достигает своего установившегося значения:
t1 = 7 с.
6) Декремент
затухания:
![]()
= 0
7) Частота колебаний
определяется по формуле
![]() ,
где Т-период колебания: Т = 0 с, таким
образом
,
где Т-период колебания: Т = 0 с, таким
образом
![]() с-1.
с-1.
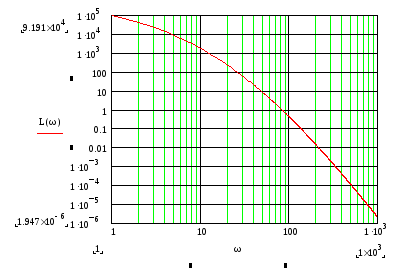
Построим ЛАЧХ
p = i*ω
ω = 1..1000

Wпер.(ω) =

Далее строится ЖЛАЧХ по номограмме Солодовникова:
для этого определяется
из номограммы время регулирования
системы
![]()
т.к.
![]()
![]()
20lg(1,2)=1.583
20lg(1,2)=1.583

Вывод: в ходе практической работы был изучен метод построения желаемых ЛАЧХ с помощью обобщенных номограмм Солодовникова