

Лабораторные работы / Практическая работа №2
.docxЦель работы: изучить порядок синтеза последовательных и параллельных устройств систем автоматического регулирования (САР), ознакомиться с порядком определения параметров корректирующих устройств.
Вариант №22 (10)
Задание:




Найдем общую передаточную функцию разомкнутой системы:


С помощью программы Matlab проведем Z – преобразование общей передаточной функции:
>> W=tf([1.11],[1.21 121.39 1 0])
Transfer function:
1.11
------------------------
1.21 s^3 + 121.4 s^2 + s
>> z=c2d(W,0.4)
Transfer function:
0.0006953 z^2 + 0.0007646 z + 9.059e-007
----------------------------------------
z^3 - 1.997 z^2 + 0.9967 z - 3.728e-018
Sampling time: 0.4
Осуществление выборки времени: 0.4 – период дискретизации.

Построим переходный процесс с помощью программы MatLab:
>> step(W)

Рисунок 1 – Переходный процесс
Время регулирования tр= 7.8 с.
Перерегулирование
 18%.
18%.
Проведем билинейные преобразования в программе MathCad, чтобы перейти к пвсевдочастоте:


Построим ЛАЧХ и ЛФЧХ в пакете MatLab.
>> margin(w)

Рисунок 2 – ЛАЧХ и ЛФЧХ
Коэффициент усиления 20logк=80, тогда k=10000.
Запас по фазе
 .
.
Запас по амплитуде L=-40рад/с.
Аппроксимируем ЛАЧХ стандартными наклонами.
Получим 2 апериодических звена, 1 интегрирующее звено.
Для первого апериодического звена:


Для второго апериодического звена:

Тогда общая передаточная функция имеет вид:

Построим ЖЛАЧХ.
Желаемой называется ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства.
ЖЛАЧХ состоит из трех основных областей:
- низкочастотной;
- среднечастотной;
- высокочастотной.
Для построения ЖЛАЧХ необходимо знать:
-

-
tp – требуемое время регулирования
Для определения среднечастотной области определяются верхняя и нижняя границы полосы пропускания:


М=1.2
Частоту среза определяют используя номограмму Солодовникова.

Рисунок 3 – Номограмма Солодовникова
Зная что
перерегулирование равно 18%, откуда
следует время регулирования
 .
Следовательно, частота среза 2,91.
.
Следовательно, частота среза 2,91.
М=1,2.


Построим ЖЛАЧХ

Рисунок 4 – Построение ЖЛАЧХ
Определим передаточную функцию ЖЛАЧХ.
Найдем коэффициент усиления: 15=20*log k
log k= 0.75
k=5.62
Найдем постоянные времени:
ω1=0,1 тогда Т1=1/0,1=10
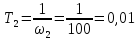
ω2=65 тогда Т2=1/65=0.015
Передаточная функция имеет следующий вид:

Построим ЛАЧХ и ЛФЧХ:

Рисунок 5 – ЛАЧХ, ЛФЧХ по передаточной функции ЖЛАЧХ
Построим ЛАЧХ последовательной коррекции:
при построении последовательной коррекции, ЛАЧХ корректирующего устройства строится на тех же осях, на которых построены ЛАЧХ реальная т ЛАЧХ желаемая. Последовательное корректирующее устройство предназначено для коррекции точности передаваемого сигнала, так как в физической реализации оно представляет из себя R-C цепочку в виде фильтра. Для того, чтобы получить ЛАЧХ корректирующего устройства необходимо геометрически выполнить следующие действия:

Найдем передаточную функцию последовательной ЛАЧХ:
ω1=0.1 тогда Т1=1/0.1=10
20log k=-65, Log k =-3.25 тогда к=0.0006
Передаточная функция примет вид:

Построим ЛАЧХ, ЛФЧХ:

Рисунок 6 – ЛАЧХ, ЛФЧХ последовательного корректирующего устройства
Найдем передаточную функцию параллельного корректирующего устройства:
Найдем коэффициент усиления: -15=20*log k
log k= - 0.75
k=0.18
Найдем постоянные времени:
ω1=0,1 тогда Т1=1/0,1=10
ω2=65 тогда Т2=1/65=0.015
Передаточная функция имеет следующий вид:
W(p)=0.18p*(10p+1)*(0.015p+1)
Построим ЛАЧХ и ЛФЧХ:

Рисунок 7 – ЛАЧХ, ЛФЧХ параллельного корректирующего устройства
Анализируя ЛАЧХ корректирующего устройства, произведем подбор RC-цепочки.
Разобьем ЛАЧХ КУ на два участка:

Найдем параметры для первой RC-цепочки:
ω1=0,1 тогда Т1=1/0,1=10
Задаемся значением С=10 мкФ, тогда
R=T/C=10/10-5=0.1Мом

Вывод: результате проделанной работы были построены ЛАЧХ, ЛФЧХ, ЖЛАЧХ, ЛАЧХ последовательного корректирующего устройства, ЛАЧХ параллельного корректирующего устройства и была проанализирована и просчитана передаточная функция корректирующего устройства.